

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Топ:
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
Коррекция систем с люфтом.
Линейн методами скоррект систему с люфтом может оказаться невозмож. Поэтому применяют нелинейн коррект уст-ва (НКУ).Смысл работы НКУ сводится к след-му-если система попадает в зону зазора,то на исполнит двигатель подается форсирующие воздействия и сис-а быстро уходит из зоны зазора в момент выборки люфта, киматич цепь замыкается, форсир-ие воздействие отключ и данная сис-а работает как линейная до тех пор пока кинемат-я цепь замкнута.Рассмотр пример реализации нелинейн коррекц

Wk(s)-линейная часть НКУ,  (хк)-нелинейн часть НКУ.Необход чтобыкоэф усиления прямой цепи сис-ы содержащей местную ПОС возрастал до бесконеч,когда сис-а в зоне зазора и был=1,когда зазор выбран. Выберем Wk(s)=1/Wсп(s).В этом случае часть цепи,содерж-й Wсп НКУ преобраз-я
(хк)-нелинейн часть НКУ.Необход чтобыкоэф усиления прямой цепи сис-ы содержащей местную ПОС возрастал до бесконеч,когда сис-а в зоне зазора и был=1,когда зазор выбран. Выберем Wk(s)=1/Wсп(s).В этом случае часть цепи,содерж-й Wсп НКУ преобраз-я 


(х) выберем в виде нелинейности типа насыщения
 В зоне зазора коэф усиления звена ПОС (х)=1 и коэф-т НКУ=1/1-1*1=бесконеч.В зоненасыщен на горизонтал участках к=0, Кнку=1/1-0*1=1
В зоне зазора коэф усиления звена ПОС (х)=1 и коэф-т НКУ=1/1-1*1=бесконеч.В зоненасыщен на горизонтал участках к=0, Кнку=1/1-0*1=1
Интегральные критерии устойчивости.
Нахожд обл-ти зад0ой колеб-ти не дает исчерпыв ответа о качестве всей сис-ы.Нет четкого ответа:Какие же именно нужно взять настроеч параметрв? Вид области может иметь сложную форму в зав-ти от структуры сис-мы


Wпи(s)= - (k0/s+k1)= -(k0+k1s)/s1. В (.) 1,2 степень затухания одинакова.В (.)2 при к0=0 имеем Wпи(s)=-k1=Wп(s). Астатизм отсутств,т е будет иметь место ошибка по положению,по мере увелич к0 начинает проявл астатизм,ошибка уменьшается. В(.)1 имеем И-рег. Между этими крайними случаями располаг область предпочт значений. Для более полной оценки выбираются: 1.Линейный интегральный критерий. Определ как площадь импульсной переходной ф-и замкнут сис-ы  (+) хорошо опередел по передат ф-и
(+) хорошо опередел по передат ф-и  при s=0
при s=0
 Передат-я ф-я по Лапласу
Передат-я ф-я по Лапласу  при s=0. (-) данного критерия в том,что он не применим к процессам с ярко выраженной колебательностью .2. Критерий по модулю
при s=0. (-) данного критерия в том,что он не применим к процессам с ярко выраженной колебательностью .2. Критерий по модулю

(-) нужно знать переходный процесс
Пименяются также квадратичные критерии

Коррекция систем с люфтом.
Линейн методами скоррект систему с люфтом может оказаться невозмож. Поэтому применяют нелинейн коррект уст-ва (НКУ).Смысл работы НКУ сводится к след-му-если система попадает в зону зазора,то на исполнит двигатель подается форсирующие воздействия и сис-а быстро уходит из зоны зазора в момент выборки люфта, киматич цепь замыкается, форсир-ие воздействие отключ и данная сис-а работает как линейная до тех пор пока кинемат-я цепь замкнута.Рассмотр пример реализации нелинейн коррекц
Wk(s)-линейная часть НКУ, (хк)-нелинейн часть НКУ.Необход чтобыкоэф усиления прямой цепи сис-ы содержащей местную ПОС возрастал до бесконеч,когда сис-а в зоне зазора и был=1,когда зазор выбран. Выберем Wk(s)=1/Wсп(s).В этом случае часть цепи,содерж-й Wсп НКУ преобраз-я
(х) выберем в виде нелинейности типа насыщения
В зоне зазора коэф усиления звена ПОС (х)=1 и коэф-т НКУ=1/1-1*1=бесконеч.В зоненасыщен на горизонтал участках к=0, Кнку=1/1-0*1=1
Статич-я точность след-х систем. Перед-е фун-и ошибки по вх-у и возмущ-му воздейс-м.
Статичес наз-ся режим когда вх управляющ координ «уставка» неизменна во времени и закончены переходн процессы в системе. Статической наз-ют ошибку обусловленную постоянными внешними воздействиями или ошибкой отдельных элементов системы Для позицион сис-ы это соответствует случаю,когда она неподвижна.Для скоростной,когда скорость измен вх сигнала постоянна (равномерная заводка).На статическую точность системы влияют статич погрешности ее элементов. Рассмотр их: 1 Силовой редуктор погрешность
Обусловлена люфтом

 Кср=tg
Кср=tg 
Yср=Хkср +δср*kср
Статич погрешн рассоглас обусловлена смещением нуля его хар-ки и технологич неточностями, не идеал геометрией. Аналог-о такая погреш имеет место в электрич схемах
 2.Исполнительн двигатель имеет зону нечувствит-и,обуслав сухим трением. Например:м\д коллектором и щетками машин
2.Исполнительн двигатель имеет зону нечувствит-и,обуслав сухим трением. Например:м\д коллектором и щетками машин
 Все рассмотр погрешн имеют аддитивн-й харак-р.Можно представ в виде структурн схемы разомкнут части.
Все рассмотр погрешн имеют аддитивн-й харак-р.Можно представ в виде структурн схемы разомкнут части.
 q-передаточ число редуктора. Приведем все погрешн-и ко вх-у сис-ы.
q-передаточ число редуктора. Приведем все погрешн-и ко вх-у сис-ы.

Из соотн-я след-т,что погреш данного элемента имеет влияние тем меньше,чем больше коэф-ты усиления предвключ звеньев. Если расматрив-я позицион сис-а,т е вых-й корд-й двигателя является угол поворота,то

В статич режиме,когда частота управл-о воздей-я =0, jw=0 s=0, Кид-> бесконеч-и. Это означ,что люфт редуктора вообще не влияет на статич емкость. Общее правило: погреш-ти эл-в располож за интеграл звеном не влияют на погрешность сист-ы. Передаточная функция ошибки по входному воздействия.
Рассмотрим упрощенную структурную схему
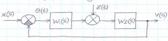
 X(s)-уставка; Z(s)-возмущающее воздействие; θ(s)-ошибка. Рассмотрим ПФ по вх возд в виде: Φ(s)= θ(s)/x(s), Z(s)=0. Wp(s)=W1(s)*W2(s) разомкнут системы.Φ(s)=1/(1+Wp(s))
X(s)-уставка; Z(s)-возмущающее воздействие; θ(s)-ошибка. Рассмотрим ПФ по вх возд в виде: Φ(s)= θ(s)/x(s), Z(s)=0. Wp(s)=W1(s)*W2(s) разомкнут системы.Φ(s)=1/(1+Wp(s))
W3(s)=Wp(s)/(1+Wp(s)); Wp(s)=WЗ (s)/(1-WЗ(s));

Найдем связь ПФ ошибки с астатизмом системы. В общем случае ПФ разомкнут системы опред соотношением: ν- порядок астатизма определяется по знаменателю


В полиноме N(s) последнее слагаемое 1 или const младшая степень s в полиноме B(s) будет =0.
 То астатизм системы м определить по младшей степени s числителя ПФ ошибки. Если
То астатизм системы м определить по младшей степени s числителя ПФ ошибки. Если  >0 то в состоянии покоя после окончания всех переходных процессов s->0, Φ(s)->0. Рассмотрим позиционную систему. Для простоты предположим что W1(s)=kу содержит только усилительные звенья,
>0 то в состоянии покоя после окончания всех переходных процессов s->0, Φ(s)->0. Рассмотрим позиционную систему. Для простоты предположим что W1(s)=kу содержит только усилительные звенья,
W2(s)=kсп/s(Tэмs+1) это СП, где kсп- к-т усиления СП и Тэм – постоянная времени. Wp(s)=kуkсп/s(Tэмs+1);
В состоянии покоя при s->0, Φ(s)->0. Теоретичеки такая система не имеет ошибки по положению. Рассмотрим систему для которой Wсп(s)=kсп/(Tэмs+1), нет интегрирующего звена.

Когда скорость постоянна, то после окончания перех процессов, при s->0, Φ(s)->1/(1+kуkсп)
Обычно вып-ся условие kуkсп >>1, тогда Φ(s)≈1/(1+kуkсп)
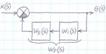
Если вх. Координата – скорость, то в установ режиме система имеет погрешность. Коэф-т усиления разомкнут СС называют добротностью по скорости kΩ=kуkсп. В общем случае Φ(s)= θ(s)/x(s), при s->0, x(s)=Ω, θ(s)- кинетическая ошибка, Φ(s)=1/kΩ, 1/kΩ=θ/Ω, kΩ=Ω/θ. На основании заданной кинетич ошибки при некот постоянной скорости можно найти требуемую добротность разомкн системы. ПФ системы по возмущающему воздействию 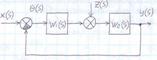 Φz(s)=θ(s)/Z(s), X(s)=0. Φz(s)=W2(s)/(1+W2(s)W1(s)), W1(s)= kу, W2(s)= kсп/(s(Tэмs+1)). В установившемся режиме после окончания перех процессов при s->0 Φz(s)=kсп/(1+kуkсп), kуkсп>>1, Φz(s)≈1/kу). Система имеет погрешность тк она я/я астатической относ-но возмущ-го воздей-я. Она имеет астатизм только относит управл-го воздей-я. В общем случае астатизм имеет место относительно того воздей-я по кот-му он введен. Для устранения этой ошибки необходимо чтобы перед точкой приложения воздействия Z(s) находилось идеальное интегрирующее звено. Тогда система будет иметь астатизм 2-го порядка относительно управляющего воздействия X(s) и 1 порядка относит возмущ воздействия Z(s). Если W1(s)=kу/s тогда Φ(s)=s/ kу.
Φz(s)=θ(s)/Z(s), X(s)=0. Φz(s)=W2(s)/(1+W2(s)W1(s)), W1(s)= kу, W2(s)= kсп/(s(Tэмs+1)). В установившемся режиме после окончания перех процессов при s->0 Φz(s)=kсп/(1+kуkсп), kуkсп>>1, Φz(s)≈1/kу). Система имеет погрешность тк она я/я астатической относ-но возмущ-го воздей-я. Она имеет астатизм только относит управл-го воздей-я. В общем случае астатизм имеет место относительно того воздей-я по кот-му он введен. Для устранения этой ошибки необходимо чтобы перед точкой приложения воздействия Z(s) находилось идеальное интегрирующее звено. Тогда система будет иметь астатизм 2-го порядка относительно управляющего воздействия X(s) и 1 порядка относит возмущ воздействия Z(s). Если W1(s)=kу/s тогда Φ(s)=s/ kу.

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!