В данном упражнении мы рассмотрим создание схемы (рис.3.1) емкостного акселе- рометра (рис. 3.2) с помощью библиотеки Parametric Electro-Mechanical Library.
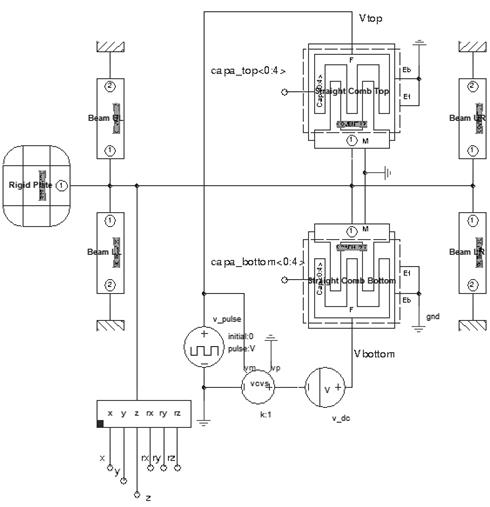
Рис.3.1. Схема емкостного акселерометра.
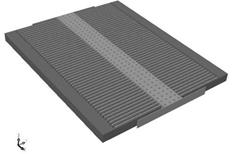
Рис.3.2. 3D модель емкостного акселерометра.
Первым шагом при создании любой схемы, является задание интересующих пара- метров (рис. 3.3). После чего они будут указаны как глобальные переменные. Это необхо- димо для проведения параметрического исследования характеристик устройства с целью оптимизации конструкции.
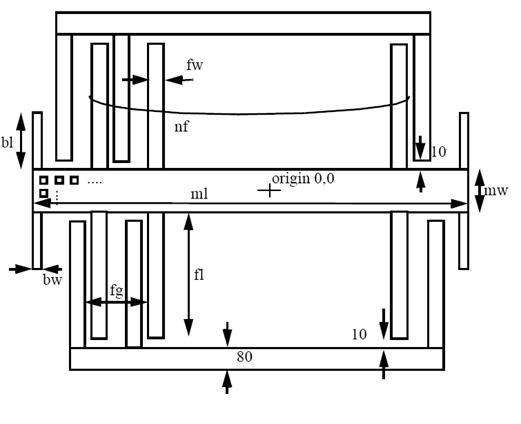
Рис 3.3. Эскиз акселерометра.
Инструкция по созданию схемы акселерометра
Подготовка к работе.
В начале необходимо создать рабочую директорию, которая будет содержать все файлы проекта.
 Процедура Пошаговое описание процедуры
Процедура Пошаговое описание процедуры

 1. Запустить CoventorWare и импортировать CombDrive_Accelerometer project
1. Запустить CoventorWare и импортировать CombDrive_Accelerometer project
а. Запустите CoventorWare
б. В окне проектов кликните "New Project"
в. Назовите проект "CombDrive_Accelerometer" и нажмите ОК. г. В окне проектов появиться файл проекта. Кликните "Open".
Установка MPD и Process.
На данном этапе вы загрузите базу данных материалов(.mpd file) и технологическую по- следовательность(.proc file). Данные файлы находятся в директории Coventor и являются частью стандартной установки пакета.
| Процедура
| Пошаговое описание процедуры
|
| 1. Установка базы данных материалов
| а. В главном окне программы кликните на стрелку субменю рядом с Materials и выбе- рите Tronics.mpd.
б. Кликните на иконке MPD Editor 
|
| 2. Проверка свойств материала
| а. В графе Materials выберете SILICON
б. Проверьте свойства материала как пока- зана на рис. 3.4.
|
| 3. Закрытие базы данных
| а. Кликните ОК и затем Close.
|

 Рис. 3.4. Окно свойств материалов
Рис. 3.4. Окно свойств материалов
| Процедура
| Пошаговое описание процедуры
|
| 3. Установите техноло-
| а. В главном окне кликните в строке Process и укажите путь
|

 гию Tronics_MEMSOI_60_ HARM.proc
гию Tronics_MEMSOI_60_ HARM.proc
C:\Coventor\CoventorWare2008\apps\Foundry\Tronics_MEMSOI_6 0_HARM_simple.proc
б.Нажмите иконку. Появиться диалоговое окно, в котором будет предложено скопировать файл процесса в рабочую дирек- торию. Нажмите YES.
в. После того как будет открыто окно редактора процессов изу- чите его. Справа находятся все доступные процессы. В левой части окна представлена технологический маршрут, по которому будет строиться прибор.
Внизу под технологическим маршрутом находится поле с описа- нием выбранного процесса в из технологического маршрута.
г. Выйдите из редактора процессов

Рис.3.5 Редактор технологических процессов
Создание схемы
Установка Элементов
| Процедура
| Пошаговое описание процедуры
|
| 1. Создание файла схемы.
| а. Во вкладке Architect в поле Schematic выберете create a new sche- matic.
б. Нажмите на стрелку рядом с иконкой  . В выпадающем ме- ню выберете New from process.
в. Запустится редактор схем. Сохраните пустой бланк вашей схемы в директории, которая будет открыта по умолчанию . В выпадающем ме- ню выберете New from process.
в. Запустится редактор схем. Сохраните пустой бланк вашей схемы в директории, которая будет открыта по умолчанию
|
 File > Save As
File > Save As
под именем combdrive_accelerometer (директория по умолчанию
\Design_Files\CombDrive_Acelerometer\Schematics). Расширение файла добавится автоматически. ai_sch.

Рис. 3.6. Элементы для описания основных свойств схемы.
Reference Frame необходима для симуля- ции ускорений, угловых скоростей и других инерциальных свойств системы. Если Мо- дель не обладает инерциальными свойства- ми, то данный блок в схеме может отсутст- вовать.
Символ COVENTOR
Служит для декларирования главных пара- метров системы
| Процедура
| Пошаговое описание процедуры
|
| 2.Расстановка компо-
| а. Кликните правой кнопкой мыши на рабочем поле схемы и в
|
| нентов акселерометра:
| субменю выберете Get Part > Parts Gallery.
|
| § rigid plate
| б. В появившейся панели слева, выберете Coventor Parts Li-
|
| § beam
| brary\Parametric Libraries\Electro-Mechanics\Rigid Plate. Если вы
|
| § straight comb
| кликните один раз левой кнопкой мыши по элементу в списке, то
|
| § fixed knot
| его графический знак отобразиться вверху. Чтобы перетащить
|
| § bus connector
| знак на схему достаточно его выделить и удерживать нажатой
|
| левую клавишу мыши, перенести на лис схемы, или кликнуть
|
| Place Part. Перенесите все компоненты акселерометра на схему
|
| (см. табл. 3.1)
|
Таблица 3.1.
| Имя символа
| Условное обозначе- ние
| Путь к сим- волу в гале- рее
| Используемый примитив
| Количество
|
| Rigid Plate
| 
| /Coventor Parts Library
/Parametric Libraries
/Electro- Mechanics
/Beam-Like Structures
| nonlinear_rigid_plate
|
|
| Beam
| 
| /Coventor Parts Library
/Parametric Libraries
/Electro- Mechanics
/Rigid Plate
| beam_1seg
|
|
| Straight Comb
| 
| /Coventor Parts Library
/Parametric Libraries
/Electro- Mechanics
/Comb Structures
| straight_comb_stator
|
|
| Mechanical Bus
Connector
| 
| /Coventor Parts Library
/Shared Parts
/Sources, In- terface
| mechports_bus_
connector
|
|
| Fixed knot
| 
| /Coventor Parts Library
/Shared Parts
/Knot Boun- dary
Conditions
| fixed_knot_bus
|
|
| Процедура
| Пошаговое описание процедуры
|
| 3. Установите все эле- менты из табл.3.1.
| Расположите элементы схемы таким образом, чтобы схема была понятной для использования. Пользуйтесь функциями Flip и Rotate из субменю (выделить компонент, кликнув левой кнопкой
|
 мыши, и клик правой кнопки мыши).
мыши, и клик правой кнопки мыши).
Соединение компонентов.
После установки компонентов их необходимо соединить, как показано на рисунке
3.7. Особо обратим внимание на то, что все компоненты имеют различные по физической природе выводы. Прежде чем соединять компоненты, надо знать для чего предназначены их выводы (см. док. CoventorWare ARCHITECT™ Reference). Соответственно механиче- ские выводы могут быть соединены только с механическими, а электрические только с электрическими и.т.д. (в ряде случаев можно пользоваться блок преобразователями кото- рые могут конвертировать одни величины в другие).
| Процедура
| Пошаговое описание процедуры
|
| 1. Соедините fixed knot и beam
| а. Перетащите fixed knot так чтобы его вывод перекрывал вто- рой вывод beam.
б. Оттащите fixed knot от beam. Появиться провод, который их соединяет.
|
| 2. Соедините beam и rigid plate.
| Кликните левой кнопкой мыши на выводе (1) beam протяните провод к rigid plate.
|
| 3. Соstraight comb and the
mechanical bus to the wire linking beam and plate
| a. Соедините терминал straight comb (он помечен кружочком) с проводом, который соединяет beam и rigid plate.
б. Сделайте тоже самое для mechanical bus connector
|


Рис. 3.7. Часть схемы акселерометра
Заметим, что расположение компонентов на схеме наиболее удобно делать так же как это планируется в реальном приборе.





