ВВЕДЕНИЕ
Инженерно-геодезические работы являются чрезвычайно важной частью комплекса работ по изысканиям, проектированию, строительству и эксплуатации сооружений различного назначения. Эти работы во многом определяют как стоимость и качество строительства, так и условия последующей эксплуатации инженерных объектов.
С развитием научно-технического прогресса происходят фундаментальные изменения технологий и методов проектно-изыскательских работ и строительства инженерных объектов, что находит отражение в изменении состава и методов производства инженерно-геодезических работ, а также в качественном изменении парка используемого геодезического оборудования. В проектно-изыскательских и строительных процессах широко применяются системы автоматизированного проектирования (САПР), автоматизированные системы управления строительством (АСУС), геоинформационные системы (ГИС) и т. д.
Инженер-строитель должен работать как с традиционными видами инженерно-геодезической информации – топографическими картами и планами, так и с их электронными аналогами – электронными картами (ЭК), являющимися основой ГИС, цифровыми (ЦММ) и математическими (МММ) моделями местности, на базе которых осуществляется системное автоматизированное проектирование инженерных объектов на уровне САПР.
В связи с тем, что при проектировании на уровне САПР резко увеличивается необходимый объем геодезической информации, инженер-строитель на современном этапе развития научно-технического прогресса должен владеть не только традиционными методами геодезических работ, но и методами, построенными на последних достижениях науки и техники.
Для выполнения инженерно-геодезических работ в настоящее время нашли широкое применение электронные тахеометры, электронные цифровые нивелиры, лазерные сканирующие системы, приборы спутниковой навигации и др.
Использование такого оборудования позволяет максимально сократить объемы и стоимость полевых работ за счет увеличения камеральных работ при широком применении средств автоматизации и вычислительной техники.
1. электронные карты, цифровые
и математические модели местности
Понятие «геоинформационная система»
Геоинформационная система (ГИС) – это автоматизированная интегрированная информационная система, предназначенная для обработки пространственно-временных данных, основой интеграции которых служит географическая информация.
Одним из основных принципов организации пространственной информации в ГИС является послойный принцип (рис. 1) [16].

| Концепция послойного представления графической информации была заимствована из САПР, однако она получила новое качественное развитие, так, например:
тематические слои в ГИС представляются не только в векторной как в САПР), но и в растровой форме;
векторные данные в ГИС обязательно являются объектными, т. е. несут информацию об объектах, а не об отдельных их элементах, как в САПР;
тематические слои в ГИС являются определенными типами цифровых картографических моделей, построенными на основе объединения пространственных объектов, имеющих общие свойства или функциональные признаки.
|
|
Рис. 1. Пример совокупности тематических слоев как интегрированной основы графической части ГИС
|
Совокупность тематических слоев образует интегрированную основу графической части ГИС, в которых объединяющей основой (подложкой) являются цифровые и электронные карты.
Топографические съемки
Тахеометрическая съемка местности
Планово-высотное обоснование тахеометрической съемки
Тахеометрическая съемка, как уже отмечалось ранее, может производиться с точек теодолитного хода, но обычно прокладываются специальные тахеометрические ходы либо перед съемкой, либо одновременно с ней.
Съемочным обоснованием тахеометрической съемки могут служить: трасса линейного сооружения, замкнутый полигон или сеть микротриангуляции. Выбор типа съемочного обоснования связан со стадией проектирования, рельефом местности, размерами участка и требуемым масштабом съемок.
Ориентирование съемочного обоснования и определение координат съемочных точек обычно осуществляются привязкой к трассе линейного сооружения или к пунктам государственной геодезической сети. При съемках небольших площадей допускается ориентирование съемочного обоснования по магнитному азимуту с вычислением условных координат съемочных точек.
Трассу линейного сооружения в качестве съемочного обоснования используют, как правило, при съемке притрассовой полосы дорог (рис. 8, а) [16].

Рис. 8. Виды съемочного обоснования тахеометрических съемок:
а – трасса линейного объекта: P 1, P 2 – пункты геодезической сети; СтI – СтVIII – съемочные точки; Bуг1 – Bуг3 – вершины углов поворота трассы; б – замкнутый полигон: 1 – трасса линейного объекта; 2 – полигон; 3 – диагональный ход;
в – микротриангуляция: 1 – трасса линейного объекта; 2 – триангуляционная сеть;
г – висячий ход: 1 – трасса линейного объекта; 2 – теодолитный ход
Съемочное обоснование в виде замкнутого тахеометрического хода (полигона) используют при съемках участков местности, занимающих большую площадь (рис. 8, б). Для съемки удаленных от основного съемочного обоснования подробностей ситуации и рельефа устраивают диагональные и висячие ходы, при этом последние могут размещаться как внутри полигона, так и за ее пределами. Увязку угловых измерений, длин линий и превышений осуществляют как для всего полигона в целом, так и для каждой его части в отдельности.
Съемочное обоснование в виде микротриангуляции (рис. 8, в) создается обычно на незастроенной местности при пересеченном или горном рельефе. По форме треугольники сети должны приближаться по возможности к равносторонним с размещением их вершин на возвышенностях местности для обеспечения прямой видимости соседних вершин и большего охвата снимаемой площади. Одну из сторон обоснования размещают на удобном для измерения длины участке местности и принимают в качестве базиса. Его измеряют дважды в прямом и обратном направлении с относительной невязкой не более 1/2000 и в случае необходимости вводят поправку за угол наклона линии. Все углы измеряют полным приемом с последующим аналитическим вычислением остальных длин сторон и координат всех точек обоснования.
Предельную ошибку измерений углов при создании съемочного обоснования тахеометрических съемок принимают
 , (3.3)
, (3.3)
где t – точность отсчетного угломерного устройства прибора; n – число измеренных углов обоснования.
Допустимую невязку в превышениях принимают
 , мм, (3.4)
, мм, (3.4)
где L – длина двойного нивелирного хода, км.
Допустимую невязку в определении расстояний принимают
 , м, (3.5)
, м, (3.5)
где  – общая длина хода, м.
– общая длина хода, м.
Работу по измерению длин сторон хода и горизонтальных углов проводят примерно так же, как при проложении теодолитного хода. Особенностью тахеометрического хода является то, что стороны хода измеряются с помощью нитяного дальномера, а кроме горизонтальных координат точек хода определяют их отметки. Следует отметить, что при работе с электронными тахеометрами вместо нитяного используется светодальномер.
Закрепление точек съемочного обоснования осуществляют сторожками и точками. Если съемочные точки необходимо сохранять долгое время, то их закрепляют стандартными деревянными или железобетонными столбами. На лицевой части сторожков и столбов надписывают сокращенное название организации, выполняющей изыскания, номер съемочной точки и время производства съемки. Иногда закрепление съемочных точек целесообразно осуществлять с помощью обрезков газовых труб, забиваемых в землю, при этом при переходе с одной съемочной точки на другую вехи вставляют в отверстия труб.
Прокладку хода производят в следующей последовательности.
1. Тахеометр устанавливают на первой исходной опорной точке с определенными координатами и известной отметкой. Установленный на исходной точке тахеометр центрируют, горизонтируют, ориентируют либо по примычному углу, либо по магнитному меридиану (с помощью буссоли). Измеряют высоту прибора над точкой стояния (рис. 9) [7].

Рис. 9. Схема работы с тахеометром на съемочной точке
2. Измеряют горизонтальные углы между линиями хода способом приемов и вертикальные углы по ходу вперед и назад при круге левом и правом. При этом следят за местом нуля прибора, постоянство которого является признаком хорошего качества измерений.
3. Измеряют расстояния дальномером по ходу вперед и назад. Полученные результаты сравнивают и оценивают полученные невязки. При этом должны учитываться требования инструкции [5].
Камеральные работы
Характер работ в процессе обработки полевых материалов в основном определяется технологией съемки.
Камеральные работы при тахеометрической съемке обычно включают в себя следующие этапы.
1. Проверка полевых журналов и абрисов.
2. Вычисление плановых координат и отметок точек съемочного обоснования (тахеометрического хода);
3. Вычисление отметок реечных точек на каждой станции;
4. Составление топографического плана местности;
5. Проверка и корректировка плана.
В качестве дополнительного этапа может быть названа подготовка и запись в память компьютера данных для создания в дальнейшем цифровой модели местности.
Проверка записей и вычислений в полевых журналах обычно производится в две руки (оператором и его помощником – расчетчиком). При этом заново вычисляют горизонтальные и вертикальные углы, горизонтальные проложения, прямые, обратные и средние превышения точек хода. Обнаруженные погрешности устраняют путем внесения поправок.
Вычисление плановых координат (x, y) точек хода выполняется практически так же, как для теодолитного хода. При этом допустимая угловая невязка хода определяется по формуле
 . (3.7)
. (3.7)
Допустимая абсолютная линейная невязка в тахеометрическом ходе определяется по формуле

, (3.8)
где P – длина (периметр) хода, м; N – число сторон в ходе.
Пример ведомости для расчета координат вершин тахеометрического хода представлен в табл. 5 [3].
Высотные невязки в ходах подсчитывают по формулам:
для замкнутого хода
 ; (3.9)
; (3.9)
для разомкнутого хода
 , (3.10)
, (3.10)
где  ср – сумма средних превышений точек хода;
ср – сумма средних превышений точек хода;  – отметки конечной и начальной точек хода, соответственно.
– отметки конечной и начальной точек хода, соответственно.
Допустимая высотная невязка тахеометрического хода определяется по формуле
 , м. (3.11)
, м. (3.11)
Если фактическая высотная невязка хода допустима, т. е. выполняется условие  , то она распределяется с обратным знаком пропорционально длинам сторон. Поправки в превышения рассчитывают с округлением до 0,01 м по формуле
, то она распределяется с обратным знаком пропорционально длинам сторон. Поправки в превышения рассчитывают с округлением до 0,01 м по формуле
 , (3.12)
, (3.12)
где di – горизонтальное проложение соответствующей стороны.
Сумма поправок должна быть равна высотной невязке с обратным знаком:
 .
.
Исправленные превышения вычисляются по формуле
 . (3.13)
. (3.13)
Зная отметку начальной точки хода и исправленные превышения, последовательно рассчитывают отметки всех точек хода по формуле:
 (3.14)
(3.14)
где  и
и  – отметки последующей и предыдущей точек хода, соответственно.
– отметки последующей и предыдущей точек хода, соответственно.
Таблица 5
Нивелирная съемка местности
Нивелирование по квадратам
После завершения разбивки участка местности на квадраты приступают к нивелированию. О количестве необходимых станций заранее сказать нельзя: все зависит от размера участка, рельефа и особенностей инструмента.
При небольшой площади и ровном рельефе иногда можно ограничиться и одной стоянкой прибора (станцией). Если число станций больше трех, то их необходимо объединить, создав замкнутый нивелирный ход (ход ABCDA на рис. 20). Станции выбирают таким образом, чтобы каждая из них могла обслужить возможно большее число точек.
На одну из станций передается отметка от ближайшего репера высотной геодезической сети. Далее опорный нивелирный ход нивелируется способом «из середины» по черной и красной сторонам реек, устанавливаемых на колышки. Высотная невязка хода должна удовлетворять условию  , где – сумма превышений связующих точек; n – число станций. Иногда используется критерий
, где – сумма превышений связующих точек; n – число станций. Иногда используется критерий  , мм, где L – длина хода, км.
, мм, где L – длина хода, км.
Распределение высотной невязки, вычисление исправленных превышений и отметок связующих точек производится так же, как и в ходе продольного технического нивелирования.
Нивелирование вершин квадратов со станций A, B, C и D (см. рис. 20) осуществляется способом «вперед» как промежуточных точек, т. е. только по черной стороне реек, устанавливаемых непосредственно на землю. При установке рейки реечник должен назвать номер точки, чтобы оператор (нивелировщик) мог сделать соответствующую запись. Записав отсчеты по всем точкам, доступным с данной станции, оператор переходит на следующую. Некоторые из точек должны быть пронивелированы с разных станций и будут являться контрольными. Отметки вершин квадратов определяются как отметки промежуточных точек, т. е. через горизонт инструмента.
Наличие компенсаторов у нивелиров дает возможность заметно повысить производительность полевых работ. Использование приборов с лимбами дает возможность при разбивке планово-высотного обоснования использовать только один прибор – нивелир. При работе с электронными нивелирами, имеющими запоминающие устройства, может быть полностью автоматизирован процесс сбора, регистрации и обработки данных.
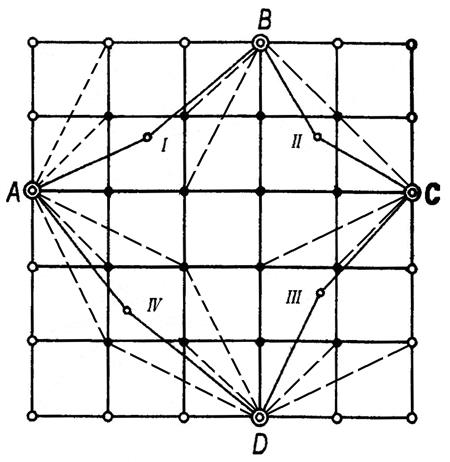
Рис. 20. Схема нивелирования сетки квадратов
на основе опорного полигона
После вычислительной обработки результатов нивелирования составляют топографический план участка местности в выбранном масштабе (рис. 21) [11]. На план наносят границы участка, вершины квадратов, плюсовые точки и ситуацию. Возле каждой вершины квадрата, а также у каждой плюсовой точки подписывают ее отметку с округлением до 1 см и проводят горизонтали с заданной высотой сечения рельефа.

Рис. 21. План нивелирования поверхности
(М 1: 1000, сечение рельефа через 0,25 м)
Использование способа квадратов является удобной основой для создания ЦММ, поскольку мы имеем дело с регулярной моделью в узлах квадратной сетки.
4.3. Лазерные и электронные цифровые нивелиры.
Преимущества и недостатки их использования
Лазерные нивелиры основаны на использовании оптического квантового генератора (лазера), создающего видимую визирную линию или плоскость. При пересечении этой видимой плоскостью нивелирной рейки на ней появляется горизонтальная красная линия, по которой берут отсчет. Для этой цели используют визуальную или фотоэлектрическую индикацию светового пучка. Один лазерный нивелир может одновременно обслуживать несколько реек.
Все лазерные нивелиры подразделяют на три большие группы:
с цилиндрическим уровнем на корпусе излучателя или на зрительной трубе нивелира, к которой крепится лазерный излучатель;
с самоустанавливающимся лазерным лучом, например нивелир с компенсатором и лазерной насадкой;
с вращающимся лазерным лучом, создающим видимые опорные горизонтальные плоскости в пространстве.
Лазерные нивелиры создаются в виде самостоятельных приборов (например, «Лимка-Горизонт»), либо в виде насадок к обычным нивелирам, обеспечивающих возможность работы серийного оптического нивелира, например нивелира 2H-3Л в режиме лазерного прибора.
В нивелирах с насадками лазерный луч устанавливается параллельно визирной оси зрительной трубы нивелира (рис. 22, а). Иногда лазерный луч совмещается с оптической осью нивелира с помощью призменных систем (рис. 22, б). Окуляр нивелира может быть снабжен откидной призмой, позволяющей работать с прибором как с обычным нивелиром. Если лазерная насадка устанавливается на нивелире с компенсатором, лазерный пучок принимает горизонтальное положение самопроизвольно [11].
Принципиально новым конструктивным решением для лазерных нивелиров является возможность задавать в пространстве горизонтальную или наклонную опорную световую плоскость. Это позволяют осуществить так называемые ротационные лазерные нивелиры (лазерные построители плоскости), которые могут быть с успехом использованы для нивелирования площадей, производства геодезического контроля вертикальной планировки и выполнения других нивелирных работ.
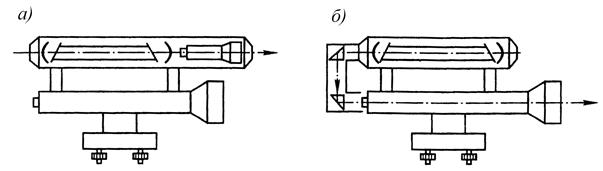
Рис. 22. Схемы лазерных насадок к нивелирам:
а – с параллельным излучателем; б – с призменным вводом светового пучка
Например, система контроля плоскости (СКП), изображенная на рис. 23, предназначена для производства геодезического контроля планировки земельных участков под горизонтальную площадку. Система состоит из трех основных блоков: лазерного излучателя (передатчика), роль которого играет лазерный построитель плоскости; фотоприемного устройства, закрепленного вертикально на строительной машине (бульдозере, скрепере и т. п.), и индикатора положения фотоприемного устройства относительно лазерной плоскости, устанавливаемого в кабине оператора машины. Получая постоянную информацию о высотном положении рабочего органа машины, оператор вручную им управляет. Эти же действия могут выполняться автоматически.
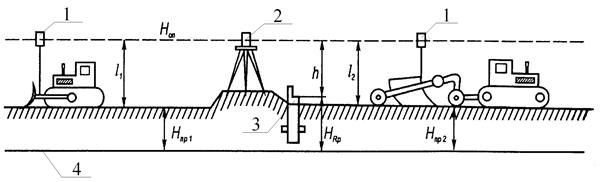
Рис. 23. Схема геодезического контроля планировки с помощью системы СКП-1:
1 – фотоприемник; 2 – передатчик; 3 – репер; 4 – отсчетная уровенная поверхность
Такого рода системы обеспечивают контроль планировки, выполняемой любым количеством землеройных механизмов, работающих на площади радиусом до 500 м (до 80 га), практически в любое время суток, при этом производительность труда повышается на 30 %.
Существенное ускорение процесса проведения нивелирных работ стало возможным с появлением электронных цифровых нивелиров. Цифровой нивелир представляет собой комбинацию оптического прибора, специализированного мини-компьютера и специальных нивелирных реек с закодированными делениями, позволяющими автоматизировать процесс взятия отсчетов.
На рис. 24 изображен нивелир SDL50, особенностью которого, как и других цифровых нивелиров, является наличие электронного датчика с высокой точностью, снимающего отсчеты по специальной штрих-кодовой рейке. После визирования наблюдателем на рейку и нажатия кнопки прибор в автоматическом режиме выполняет все измерения и отображает на экране значения отсчета по рейке и расстояния до нее. Использование цифровых нивелиров с кодовой регистрацией отсчетов по рейкам с последующей их обработкой на встроенных в приборы мини-ЭВМ и возможностью соединения с персональным компьютером позволяет практически полностью автоматизировать процесс нивелирных работ.

Рис. 24. Нивелир SDL50:
1 – ручка; 2 – зеркало уровня; 3 – круглый уровень; 4 – объектив; 5 – кремальера; 6 – клавиша измерений; 7 – горизонтальные наводящие винты; 8 – порт для передачи данных; 9 – подъемные винты; 10 – подставка; 11 – кольцо перестановки лимба горизонтального круга; 12 – лимб горизонтального круга;
13 – юстировочный винт сетки нитей с защитной крышкой; 14 – крышка аккумуляторного отсека; 15 – окуляр; 16 – клавиатура; 17 – экран; 18 – визир
К сожалению, наряду со многими положительными факторами применение лазерных и цифровых нивелиров имеет и ряд недостатков, аналогичных недостаткам, присущим электронным тахеометрам и подробно рассмотренным в разд. 3.7.
5. топографическая съемка местности
с применением систем спутникового позиционирования
5.1. Организация работ по топографической съемке
с помощью спутниковых приемников
Топографическая съемка с использованием геодезических спутниковых приемников выполняется в три этапа: подготовительные работы, создание геодезического съемочного обоснования, собственно съемка [4].
В ходе подготовительных работ выбирают места для закрепления точек съемочного обоснования с таким расчетом, чтобы не было помех от расположенных вблизи сооружений, высоких деревьев, источников мощного радиоизлучения. Все эти факторы могут существенно снизить качество выполняемых спутниковых измерений. Кроме того, особое внимание уделяется планированию наблюдений, для этих целей используют специальный модуль в программном обеспечении спутникового приемника. Этот модуль позволяет получить характеристику процесса позиционирования на любой момент времени и, таким образом, выбрать наиболее благоприятный период для выполнения измерений.
Определение координат пунктов геодезического съемочного обоснования производится методом статических спутниковых наблюдений. Данный метод является наиболее надежным и точным методом, позволяющим получить разность координат смежных пунктов с миллиметровой точностью. Один из приемников, называемый базовым, устанавливают на штативе над исходной точкой с известными координатами (пункт государственной геодезической сети, геодезической сети сгущения), а второй, называемый мобильным, – поочередно на пункты съемочной сети. При этом должно быть обеспечено условие синхронных измерений базовым и мобильным приемниками.
Длительность времени наблюдений выбирается в зависимости от длин базовых линий, количества одновременно наблюдаемых спутников, класса используемой спутниковой аппаратуры и условий наблюдений. С учетом всех перечисленных факторов время измерения каждой базовой линии может составлять от 15–20 мин. до 2,5–3,0 ч. Работа с каждым приемником на станции включает в себя: центрирование приемника над пунктом с помощью нитяного или оптического отвеса, измерение высоты антенны с помощью секционной рейки, включение приемника. При измерении в статическом режиме во время работы не требуется производить каких-либо действий. Приемник автоматически тестируется, отыскивает и захватывает все доступные спутники, производит GPS-измерения и заносит в память всю информацию. По истечении необходимого времени наблюдений мобильный приемник переносят на следующую определяемую точку. После окончания измерений производят обработку полученных результатов, которая включает в себя вычисление длин базовых линий и координат пунктов обоснования в системе координат WGS-84, строгое уравнивание сети по методу наименьших квадратов, трансформирование уравненных координат в государственную или местную (условную) систему координат. Точность определения планового местоположения точек статическим способом достигает
(5–10 мм) + (1–2 мм на км), высотного – в 2–3 раза ниже.
Топографическая съемка местности выполняется посредством проведения кинематических спутниковых измерений, позволяющих получать координаты и высоты точек за короткие промежутки времени. Для этого базовый приемник на штативе устанавливается на пункте съемочного обоснования, а мобильный – поочередно на снимаемых точках, причем приемник вместе с источником питания располагают в специальном рюкзаке, а приемная антенна и контроллер, с помощью которого осуществляется управление процессом съемки, крепятся на вехе (рис. 25).
Вначале выполняется инициализация – привязка мобильной станции к базовой, для чего измерения на первой точке проводят несколько дольше (20 – 30 с), чем на последующих точках. Установив веху с антенной на точку и задав в контроллере все необходимые параметры (высоту установки антенны на вехе, номер пикета, его признак: например: угол забора, смотровой колодец и т. п.), начинают съемку, контролируя вертикальность вехи по пузырьку круглого уровня.

Рис. 25. Базовый (а) и мобильный (б) приемники
Время наблюдения на точке обычно не превышает 5–10 с, после чего измерения останавливают и, не выключая приемника, переходят на следующую точку. Если снимаемая точка располагается в непосредственной близости от строения, высоких деревьев, других объектов, закрывающих видимость на спутники, время измерений должно быть увеличено. Кроме того, измерения можно повторить, вернувшись на эти точки еще раз. Завершают съемку участка наблюдениями на первой точке либо на пункте с известными координатами. После завершения съемки производят обработку результатов так же, как и для статических измерений. Точность способа кинематических измерений составляет 2–3 см в плане и 6–8 см по высоте. Результаты измерений могут быть представлены как в цифровом виде, так и в графической форме.
5.2. Комплексное использование спутниковой аппаратуры
и традиционных геодезических средств
Для использования технологий спутниковых координатных определений необходимо обеспечение видимости на момент измерений по линии «спутник – антенна приемного устройства». Во многих случаях практики обеспечить такую видимость не удается. Поэтому актуальным становится комплексное использование для решения геодезических задач спутниковой аппаратуры и традиционных геодезических средств (светодальномеров, теодолитов, нивелиров, электронных тахеометров). Наиболее эффективно использование GPS-аппаратуры с электронными тахеометрами. Это обусловлено следующими причинами.
Электронные тахеометры являются универсальными геодезическими приборами. Они предназначены для измерения углов и расстояний. В результаты измерений тахеометром автоматически вводятся поправки за метеоусловия (причем отдельные тахеометры сами определяют температуру и давление), за приведение длин линий к плоскости горизонта и др. Тахеометры обеспечивают цифровую индикацию горизонтальных и вертикальных углов, дирекционных углов, наклонных расстояний, горизонтальных проложений, приращений координат и других величин. Время на выполнение комплекса измерений (горизонтальное направление + вертикальный угол + расстояние + вывод результата) составляет несколько секунд. Большинство тахеометров имеет собственную память, встроенный микропроцессор и библиотеку программ для выполнения геодезических работ. Ряд современных тахеометров позволяет выполнять измерения до невидимых точек (например, через листву) с помощью специального отражателя, а также работать с микропризменными наклейками.
Современные тахеометры и GPS-приемники имеют одинаковые форматы записи полевой информации, взаимозаменяемые карты памяти. Возможна также автоматизированная передача полевых измерений в пакет совместной обработки с последующей передачей результатов измерений в базы данных ГИС.
Принципиально возможно использование спутниковой геодезической аппаратуры (СГА) и традиционных геодезических средств по следующим направлениям:
1) геодезические построения на объекте работ, выполненные СГА, и традиционные не имеют между собой никаких связей;
2) спутниковые и традиционные геодезические построения связаны между собой; при этом возможно три варианта связей:
развитие сети традиционными методами от пунктов, определенных спутниковыми приемниками;
развитие сети методами GPS-измерений от пунктов, определенных традиционными методами;
ступенчатое развитие сетей, при котором спутниковые и традиционные измерения чередуются.
Традиционными методами определения плановых координат пунктов являются: триангуляция, полигонометрия, трилатерация, засечки. При выборе метода учитываются требуемая точность координатных определений, сроки выполнения работ, характер местности и состояние исходной геодезической основы в районе выполнения работ, прогноз погоды, условия видимости и пр.
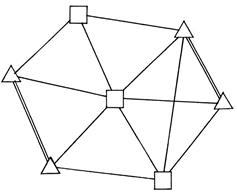
Определение координат пунктов с помощью СГА может выполняться следующими методами: лучевым (рис. 26), сетевым (рис. 27), совмещенным (рис. 28).
На этих рисунках выполнено в следующие условные знаки:
треугольник – исходный пункт сети с известными координатами в системе, установленной проектом работ;
квадрат – опорная станция в сети;
круг – мобильная станция в сети.

| 
|
| Рис. 26. Лучевой метод из одного (а) и двух (б) опорных пунктов
| Рис. 27. Сетевой метод
|
При лучевом методе определяемые пункты координируются с одного опорного пункта (см. рис. 26, а). Рассматриваемый метод часто называют радиальным. Он широко используется для выполнения топографических съемок в кинематическом режиме. Недостаток лучевого метода заключается в отсутствии контроля определения координат. Для организации такого контроля определяемые пункты при развитии геодезической сети лучевым методом координируются не менее чем с двух опорных пунктов (рис. 26, б).
Укажем на важную особенность координатных определений с помощью спутниковой аппаратуры. Пусть определяемые точки 3, 4 находятся на расстоянии 100 м одна от другой и на удалении ≈ 10 км от опорных пунктов 1, 2 (см. рис. 26, б). Угол засечки g примем равным 45°. Пренебрегая ошибками центрирования, вычислим среднюю квадратическую ошибку положения определяемых точек по формуле
 , (5.1)
, (5.1)
где mS – ошибка измерения расстояния, в статическом режиме для двухчастотной аппаратуры примем mS = 5 мм + 1 мм ∙ 10 = 15 мм.
В результате получим mxy = 30 мм. Средняя квадратическая ошибка взаимного положения пунктов 3, 4:  = 42 мм, что при расстояниях между определяемыми точками 100 м дает относительную ошибку 1/2400. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии 3 – 4 как с помощью СГА, так и топографическими светодальномерами.
= 42 мм, что при расстояниях между определяемыми точками 100 м дает относительную ошибку 1/2400. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии 3 – 4 как с помощью СГА, так и топографическими светодальномерами.
Сетевой метод спутниковых координатных определений предполагает проведение измерений на каждой линии сети (см. рис. 27). Это по сути аналог трилатерационных построений.
При сетевом методе целесообразно использовать несколько одновременно работающих станций. Это позволяет в каждом сеансе наблюдений измерять не только запроектированные линии, но и дополнительные, соединяющие любую пару участвующих в наблюдениях приемников. По окончании сеанса часть станций остается на месте, а другие – устанавливаются на следующих, согласно проекту, пунктах. В очередном сеансе линии между пунктами первой группы измеряют повторно, что позволяет осуществлять контроль их определения. При значительном числе двойных измерений можно выполнять предварительный контроль качества измерений по их разностям.
При использовании сетевого метода контроль качества измерений осуществляется также по невязкам замкнутых построений. В итоге сетевой метод позволяет за счет избыточных измерений существенно повысить точность и надежность координатных определений.
При совмещенном методе часть пунктов сети определяется сетевым, а часть пунктов – лучевым методом (см. рис. 28).
Рассмотрим схемы геодезических построений, в которых спутниковые и традиционные геодезические построения связаны между собой. В этом случае возможны различные варианты (рис. 29–32).

| 
|
| Рис. 28. Совмещенный метод
| Рис. 29. Полигонометрический ход опирается на пункты GPS-сети
|

| 
|
| Рис. 30. Определение координат пункта засечками от GPS-пунктов: а – линейные; б – обратные линейно-угловые группы пунктов
| Рис. 31. Сеть GPS опирается на традиционную
|
Использование спутниковых приемников и электронных тахеометров весьма эффективно при выполнении топографических или кадастровых съемок. Для этого на объекте работ GPS-методом определяют сеть пунктов (минимум два пункта). Тахеометр устанавливают в любом месте, удобном для проведения съемок. Координаты точек стояния тахеометров определяются по координатам GPS-пунктов любой из известных засечек (см. варианты на рис. 30). Съемку выполняют как обычно.

| 
|
| Рис. 32. Ступенчатое развитие сетей
| Рис. 33. Блочная тахеометрия
|
Если с какой-либо точки стояния тахеометра нет видимости на GPS-пункты, и соответственно невозможно определить координаты точек стояния, то можно использовать принцип блочной тахеометрии (рис. 33).
В этом случае участок разбивают на блоки, в пределах каждого из которых выполняю съемку с одной установки электронного тахеометра. В программу наблюдений включаются кроме пикетов имеющиеся в блоке исходные пункты и связующие точки (1 и 2, см. на рис. 33).
По связующим точкам осуществляется последующее объединение отдельных блоков в единый блок. Число связующих точек между смежными блоками должно быть не менее двух. Особенностью метода является то, что необязательна видимость между смежными установками тахеометра.
5.3. Преимущества и недостатки спутниковых систем
и перспективы их использования
Основными преимуществами спутникового позиционирования являются всепогодность, глобальность, оперативность, точность и эффективность. Эти качества зависят от баллистического построения системы, высокой стабильности бортовых эталонов частоты, выбора сигнала и способов его обработки, а также от способов устранения и компенсации погрешностей. Параметры систем и их отдельных элементов, а также математическое обеспечение выбирают так, чтобы ошибка навигационных определений по координатам была не более 10 м, а по скорости – до 0,05 м/с.
В качестве недостатка спутниковых систем можно отметить возникновение при их работе ошибки, вызываемой «многолучевостью», которая обусловлена многократными переотражениями сигнала со спутника от окружающих предметов и поверхностей до того, как он попадает в антенну приемника, а также дифракцией на мелких предметах, соизмеримых с длиной волны, находящихся на пути радиолуча. При этом радиолуч проходит по другому пути, что вызывает изменение его амплитуды и фазы. В приемной антенне происходит интерференция прямого и отраженного лучей, и, следовательно, изменяются амплитуда и фаза результирующего поля, что, в свою очередь, ведет к искаж








