ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Методические указания к лабораторной работе №5
по разделу «Механика»
для студентов всех специальностей
дневной и заочной формы обучения
Могилев 2015
УДК 532.516
Рассмотрены и рекомендованы к изданию на заседании кафедры физики
Протокол № 12 от 01.07.15
Составители: В.Л.Малышев, Т. В. Светлова, Т.И. Пусовская
Рецензент к. ф-м. н. А.С. Скапцов
Методические указания предназначены для выполнения лабораторной работы №5 «ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ» по разделу «Механика» для студентов всех специальностей дневной и заочной форм обучения.
©УО «Могилевский государственный университет продовольствия», 2015
ЛАБОРАТОРНАЯ РАБОТА № 5.
ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ.
Цель работы: изучить основные кинематические характеристики поступательного движения; экспериментально определить среднюю и мгновенную скорость при равноускоренном движении тела; экспериментально определить модуль ускорения равноускоренного прямолинейного движения.
Приборы и оборудование: прибор для изучения законов механики с принадлежностями, секундомер, оптоэлектрические датчики.
ТЕОРЕТИЧЕСКОЕ ВВЕДЕНИЕ
Механика – это часть физики, которая изучает закономерности механического движения и причины, вызывающие или изменяющие это движение.
Основная задача механики – определение положения тела в любой момент времени.
Механическое движение – это изменение взаимного расположения тел или их частей в пространстве с течением времени.
Кинематика – изучает движение тел, не рассматривая причины, которые это движение обуславливают.
Механика для описания движения тел в зависимости от условий конкретных задач использует упрощенные физические модели:
· материальная точка – тело, форма и размеры которого несущественны в условиях данной задачи. Массой материальной точки пренебречь нельзя!
· Абсолютно твердое тело – тело, деформации которого в условиях данной задачи можно не учитывать, и расстояние между любыми двумя точками этого тела остается постоянным.
Скорость материальной точки
 Скорость – это физическая величина, которая характеризует быстроту и направление движения материальной точки.
Скорость – это физическая величина, которая характеризует быстроту и направление движения материальной точки.
 Пусть материальная точка за промежуток времени
Пусть материальная точка за промежуток времени  переместилась из положения М в положение N. При этом радиус-вектор изменился на
переместилась из положения М в положение N. При этом радиус-вектор изменился на  . Отношение вектора перемещения к промежутку времени называют вектором
. Отношение вектора перемещения к промежутку времени называют вектором
средней скорости 
.(1) Направление вектора средней скорости совпадает с направлением
(рис.3).
Мгновенная скорость (скорость в данный момент времени) равна пределу средней скорости при  , т.е.
, т.е.  .(2) Таким образом, вектор мгновенной скорости равен производной радиус-вектора по времени.
.(2) Таким образом, вектор мгновенной скорости равен производной радиус-вектора по времени.
Единица измерения скорости –  .
.
Вектор мгновенной скорости направлен по касательной к траектории в сторону движения (рис.4).
 Модуль мгновенной скорости
Модуль мгновенной скорости  , где s=s(t). (3)
, где s=s(t). (3)
Длина пути s, пройденного телом за промежуток времени от t1 до t2, задается следующим интегралом:

 Проекции вектора мгновенной скорости на оси декартовой системы координат равны первым производным от соответствующих координат по времени:
Проекции вектора мгновенной скорости на оси декартовой системы координат равны первым производным от соответствующих координат по времени:

Модуль вектора скорости равен  .
.
Движение точки называется равномерным, если модуль ее скорости не изменяется с течением времени ( ), для него
), для него  .
.
Если модуль скорости увеличивается с течением времени, то движение называется ускоренным, если же он убывает с течением времени, то движение называется замедленным.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Опыт 1
1. Установка для выполнения опыта схематически изображена на рисунке 6.
 Для определения средней и мгновенной скорости шарика при его движении по наклонной части желоба, приподнимите конец основания, на котором смонтировано пусковое устройство, на высоту 3 – 5 см и установите шарик в пусковое устройство.
Для определения средней и мгновенной скорости шарика при его движении по наклонной части желоба, приподнимите конец основания, на котором смонтировано пусковое устройство, на высоту 3 – 5 см и установите шарик в пусковое устройство.
2. Установите датчики на наклонной части желоба: первый датчик разместите на нулевой отметке шкалы, а второй датчик на расстоянии 20 см от первого (см. рис.6).
3. Освободите шарик и измерьте не менее трех раз промежутки времени, в течение которых шарик двигался между оптическими датчиками.
4. Повторите измерения, каждый раз уменьшая расстояние между датчиками на 4 см (по 2 см с каждой стороны), так, чтобы середина отрезка между датчиками располагалась в точке желоба, при прохождении которой требуется найти мгновенную скорость (на расстоянии 10 см от нулевой отметки шкалы). При последнем измерении датчики должны находиться на минимальном расстоянии друг от друга.
7. Рассчитайте значения средней скорости шарика по формуле 1 при различных расстояниях между датчиками. Результаты измерений и вычислений занесите в таблицу.
Таблица 1 – Определение средней скорости
8. Подсоедините оптический датчик к гнезду 1 секундомера, включите секундомер и установите прибор в режим (ONE).
9. Установите датчик на наклонной части желоба на расстоянии 10 см от нулевой отметки шкалы.
10. Освободите шарик, установленный в пусковом устройстве, и измерьте промежуток времени, в течение которого шарик перекрывал световой пучок, излучаемый светодиодом, двигаясь в створе оптического датчика (диаметр шарика d =22 мм).
11. Рассчитайте модуль скорости шарика (для расчета достаточно разделить диаметр шарика на измеренный промежуток времени) и сравните полученный результат с последним результатом измерений мгновенной скорости двумя датчиками.
Опыт 2.
1. 
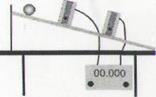
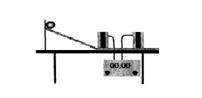 Установка для выполнения опыта схематически изображена на рисунке 7.
Установка для выполнения опыта схематически изображена на рисунке 7.
2. Для определения средней и мгновенной скорости шарика при его движении на горизонтальном участке желоба, установите датчики на расстоянии 10 см друг от друга на горизонтальной части желоба так, чтобы середина отрезка между датчиками располагалась около точки желоба, при прохождении которой требуется найти мгновенную скорость.
3. Установите шарик в пусковое устройство.
5. Освободите шарик и не менее трех раз измерьте промежутки времени, в течение которых шарик двигался между оптическими датчиками.
6. Повторите измерения, каждый раз уменьшая расстояние между датчиками на 4 см (по 2 см с каждой стороны). При последнем измерении разместите датчики на минимальном расстоянии друг от друга.
7. Вычислите значения средней скорости шарика по формуле 1для различных расстояний между датчиками, с точностью до 0.01.
8. Результаты измерений и вычислений занесите в таблицу 2.
Таблица 2 – Вычисление значения средней скорости шарика для различных расстояний между датчиками
9. Измерьте модуль скорости шарика на горизонтальном участке желоба, используя один датчик, и сравните полученные результаты с результатами измерений скорости двумя датчиками.
ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Методические указания к лабораторной работе №5
по разделу «Механика»
для студентов всех специальностей
дневной и заочной формы обучения
Могилев 2015
УДК 532.516
Рассмотрены и рекомендованы к изданию на заседании кафедры физики
Протокол № 12 от 01.07.15
Составители: В.Л.Малышев, Т. В. Светлова, Т.И. Пусовская
Рецензент к. ф-м. н. А.С. Скапцов
Методические указания предназначены для выполнения лабораторной работы №5 «ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ» по разделу «Механика» для студентов всех специальностей дневной и заочной форм обучения.
©УО «Могилевский государственный университет продовольствия», 2015
ЛАБОРАТОРНАЯ РАБОТА № 5.








