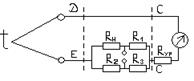
Устройство для автоматического введения поправки, измерительный прибор милливольтметр.
1)  Расчётный метод
Расчётный метод
2)Автоматическое введение поправки.
| R.н резистор для установки начала шкалы
|
| R.п определяющий диапазон измерения
|
| R.к контрольный резистор для проверки рабочего тока
|
| R.м медный резистор для введения поправки на изменение температуры
свободных концов
|
| R.с для установки рабочего тока
|
| R.б нагрузочный резистор стабилизатора ИПС
|

Возрастает, следовательно возрастает сопротивление медного резистора, следовательно
35. Цепь ТЭП-милливольтметр,условия,обеспечивающие правильное измерение температуры.

Для снижения температурного коэф прибора(αм), посл с рамкой включают добавочное манганиновое сопр (не зависит от t).
Большое внеш сопр МВ снижает внешнее сопр цепи.
Условия правильного изм t:
1)градуировка ТЭП и МВ должны совпадать;
2)внеш сопр засчёт Rур доводится до знач на шкале;
3)учёт t0 – темп своб концов.
36. Автоматический потенциометр, устройство, принцип действия, уравнение компенсации, компенсация изменения температуры свободных концов.
 Автоматические потенциометры типа КСП предназначены для автоматического измерения термоЭДС преобразователей компенсационным методом. Измеряемая термоЭДС компенсируется (уравновешивается) напряжением между точками а и b: E(t, t0) = Uab. Основной элемент - реохорд R — проволочный резистор строго определенного сопротивления (90 Ом), равномерно распределенного на длине, равной длине шкалы потенциометра (100 мм у КСП1 и 160 мм у КСП2). По реохорду реверсивным двигателем РД передвигается движок, жестко сочлененный со стрелкой, перемещающийся вдоль неподвижной шкалы. Через R пропускается постоянный ток от стабилизированного источника ИПС. Потенциал а зависит от положения движка (при смещении движка справа налево потенциал а↓,т.к. движение осуществляется по направлению тока I1).
Автоматические потенциометры типа КСП предназначены для автоматического измерения термоЭДС преобразователей компенсационным методом. Измеряемая термоЭДС компенсируется (уравновешивается) напряжением между точками а и b: E(t, t0) = Uab. Основной элемент - реохорд R — проволочный резистор строго определенного сопротивления (90 Ом), равномерно распределенного на длине, равной длине шкалы потенциометра (100 мм у КСП1 и 160 мм у КСП2). По реохорду реверсивным двигателем РД передвигается движок, жестко сочлененный со стрелкой, перемещающийся вдоль неподвижной шкалы. Через R пропускается постоянный ток от стабилизированного источника ИПС. Потенциал а зависит от положения движка (при смещении движка справа налево потенциал а↓,т.к. движение осуществляется по направлению тока I1).
Предположим: потенциал b не изменяется. ТЭП включается так, чтобы E(t, t0) и ΔU вычитались. Их разность = входное напряжение усилителя УС. РД, подключенный к выходу усилителя установит движок в такое положение, при котором ΔU = 0 и по достижении этого положения остановится (т.к. исчезнет ΔU => исчезнет напряжение в управляющей обмотке двигателя). Новое изменение измеряемой температуры t вызовет изменение E(t, t0), и появление ΔU (разбаланс схемы). Это вновь приведет к включению двигателя РД и перемещению движка и стрелки до положения, при котором ΔU =0. Шкала потенциометра м.б. отградуирована либо в милливольтах, либо в градусах. В последнем случае на шкале указывается обозначение номинальной статической характеристики ТЭП (градуировка), например (0...600) °С НСХ XK(L).
Если измеряемая температура осталась неизменной, а температура свободных концов t0 ↑, термоЭДС преобразователя ↓ (если измеряемая температура больше 0 °С), т.е. на вход потенциометра поступит меньшее напряжение E(t, t0). Однако показания потенциометра при этом изменяться не должны. Должно выполняться ΔU = 0, а для этого необходимо, чтобы Uab ↓ для сохранения E(t, t0) = Uab. Т.о., для автоматического введения поправки на изменение t0 нужно, чтобы с изменением t0 изменялся потенциал b. Это изменение должно быть равным E(t0,0). Для этого нужно изменить Rм или Rк . В реальных схемах: при ↑ t0 Rм ↑.
| ур-ие равновесия при любой t
|
(м=0,1…)
 - увел. сопр при умен. термоЭДС на - увел. сопр при умен. термоЭДС на 
|
| - темп-ый коэф электросопр меди
|