Система наблюдения
Введение
Система наблюдения является важнейшим элементом перспективной АНС, позволяющим получать информацию о местоположении и других важных характеристиках ВС на всех этапах полета, а также движении ВС и спецавтотранспорта по рабочей площади аэродрома.
Система наблюдения обеспечивает органы ОрВД оперативной и достоверной информацией, позволяющей воспроизводить на средствах отображения траекторию полета ВС, а также производить прием и обработку дополнительной информации с борта ВС в интересах УВД.
Функция наблюдения заключается в действиях, связанных с определением положения ВС и сопоставлением этой информации с планом полета.
Структура и техническая архитектура системы наблюдения в АНС России представлена на рисунке 1.
В соответствии с действующей классификацией методы наблюдения подразделяются на независимое наблюдение, при котором местоположение каждого ВС определяется одним и тем же независимым средством – это первичные обзорные радиолокаторы (ПОРЛ), вторичные радиолокаторы (ВОРЛ), многопозиционные системы наблюдения (МПСН), радиолокаторы обзора летного поля (РЛС ОЛП), используемые на отдельных аэродромах посадочные радиолокаторы и зависимое наблюдение, при котором местоположение определяется непосредственно на борту каждого ВС с помощью, например, данных глобальной навигационной спутниковой системы – GNSS и передается по речевой связи или линиям передачи данных на землю и окружающим воздушным судам. К этим методам относится метод автоматического зависимого наблюдения - вещательное (АЗН-В) и контрактное или адресное (АЗН-А).
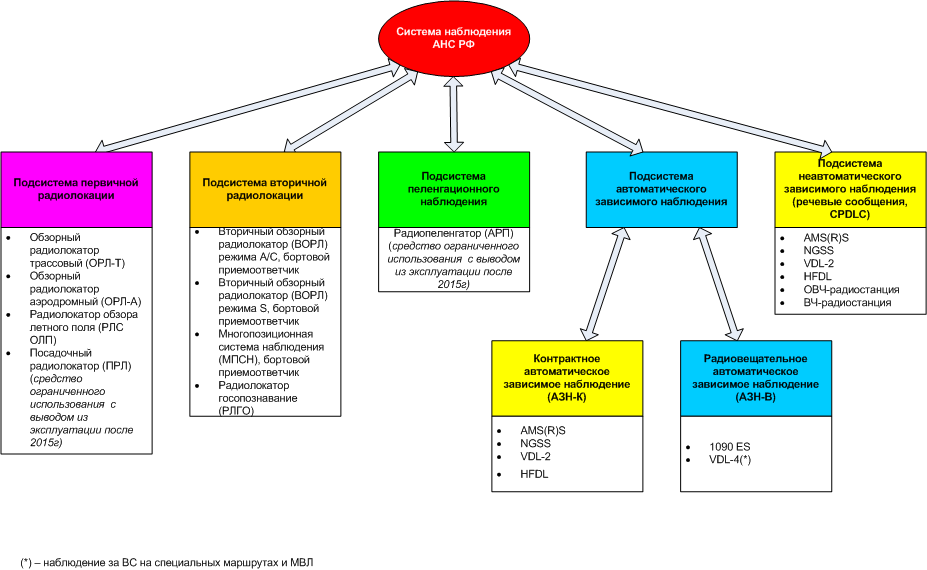
Рисунок 1. Структура системы наблюдения.
Средства радиолокационного наблюдения
Первичный обзорный радиолокатор (ПОРЛ)
Функция первичного обзорного радиолокатора (ПОРЛ) – обнаружение и определение координат (азимут – дальность) воздушных объектов в воздушном пространстве с последующей передачей информации о воздушной обстановке в центры (пункты) ОВД для целей контроля и обеспечения управления воздушным движением.
В настоящее время ПОРЛ широко используется на всей территории РФ в сопряжении (или со встроенным) с вторичным обзорным радиолокатором (ВОРЛ).
Традиционный вторичный радиолокатор (ВОРЛ)
Функцией вторичного обзорного радиолокатора (ВОРЛ) является определение местонахождения ВС оборудованных ответчиками и обеспечение получения дополнительной информации (барометрической высоты полета, номера борта, запаса топлива и др.), позволяющей, в частности, идентифицировать ВС в процессе управления воздушным движением.
В Российской Федерации ВОРЛ используется в автономном варианте исполнения в сопряжении с ПОРЛ, а также во встроенном варианте (ПОРЛ + ВОРЛ).
Отличие наблюдения ВОРЛ в режиме S от традиционного ВОРЛ заключается в том, что запрос бортовых ответчиков может осуществляться избирательно по каждому ВС в соответствии, как уже отмечалось выше, с персональным адресом, присвоенным каждому самолету и хранящимся (записанным) в бортовом ответчике режима S.
Наличие возможности персонального обращения (запроса) к каждому ВС в соответствии с присвоенным ему адресом позволяет организовать на базе ВОРЛ линию передачи данных режима S и обеспечить передачу по каналу земля-борт-земля значительно большего объема информации. В дополнение к информации о ВС традиционного ВОРЛ, в режиме S ВОРЛ может быть также передана информация о векторе скорости и намерении ВС, что значительно повышает эффективность работы АС УВД. При оснащении ВС ответчиками 4-5 уровней обеспечивается возможность автоматизированного межмашинного обмена информацией «бортовой компьютер – АС УВД».
Радиолокатор госопознавания
Радиолокатор госопознавания (РЛГО) предназначен для реализации функции «свой-чужой» и, также как ВОРЛ, для определения местонахождения ВС и получения дополнительной информации (барометрической высоты полета, позывного номера, запаса топлива и др.). РЛГО, в отличие от ВОРЛ, работает на закрытых частотах.
Введение
Система навигации, применяемая для полетов в воздушном пространстве РФ в настоящее время включает в себя подсистему традиционных средств ближней и дальней навигации, а также автономные бортовые средства навигации. Основу средств навигации на маршруте и в районе аэродрома составляют ОПРС, а на отдельных международных воздушных трассах и крупных аэропортах - маяки VOR/DME. В качестве средств точного захода на посадку используются системы инструментальной посадки типа ILS.
Система ближней навигации (D)VOR/DME
Система ближней навигации (D)VOR/DME предназначена для обеспечения навигации ВС на воздушных трассах и в районе аэродрома с требуемой точностью.
Оборудование азимутальных радиомаяков VOR подразделяются на:
- обыкновенный VOR;
- доплеровский DVOR.
Обыкновенный VOR имеет простую антенную систему. Он используется на достаточно ровном рельефе местности, где нет близко расположенных возвышенностей, лесных массивов, линий электропередачи и строительных сооружений, вызывающие переотражения и искажения выходных сигналов радиомаяка. Погрешность информации об азимуте составляет порядка 2 градусов.
Доплеровский радиомаяк имеет сложную антенную систему, что позволяет устанавливать его в местах со сложной ситуационной обстановкой (неровности рельефа местности, наличие сооружений и т.п.). Погрешность информации об азимуте составляет порядка 1 градуса.
Приводные радиостанции
Приводные радиостанции (ПРС) представляют собой передающие устройства, работающие в диапазоне длинных и средних волн 190 – 1750 кГц. Они предназначены для обеспечения полетов ВС, оборудованных автоматическими радиокомпасами.
Системы захода на посадку
Навигационное обслуживание захода на посадку и посадку воздушных судов будет обеспечиваться:
A. Радиомаячной системой точного захода на посадку ILS, обеспечивающей посадку ВС в условиях метеоминимума I, II, III категорий ИКАО.
В состав системы точного захода на посадку ILS входят:
- курсовой радиомаяк, работающий в диапазоне 108,1 …11.975 МГц;
- глиссадный радиомаяк, работающий в диапазоне 329 … 335 МГц;
- навигационно-посадочный дальномерный радиомаяк DМЕ/Р, вместо ближнего и дальнего маркерных радиомаяков МРМ.
B. Системой неточного захода на посадку на базе оборудования (D)VOR/DME и ПРС-DME будут обеспечивать привод ВС в район аэродрома, построение маневра и снижение с посадочным курсом до установленной высоты (метеоминимума). Минимум аэродрома с использованием метода зональной навигации по СНС может быть близок (или даже ниже) к установленному минимуму посадки по системе ОСП. При этом, необходимо выполнение условий установки оборудования (D)VOR/DME и ОПРС-ДМЕ на аэродроме.
Система спутниковой посадки
Спутниковая система захода на посадку по I категории ИКАО - система функционального дополнения наземного базирования (GBAS) предназначена для коррекции псевдодальностей и оценки работоспособности навигационных спутников, то есть целостности навигационной информации и передачи их на борт ВС (рисунок 4).
Вычисление поправок к псевдодальностям основано на точных знаниях координат антенн спутниковых приемников станции, что позволяет сравнивать измеренные и вычисленные по известным из навигационного сообщения спутника его координатам псевдодальности. Полученные таким образом дифференциальные поправки передаются на борт ВС, что повышает точность и целостность навигационных определений до требований посадки по I категории ИКАО.
Поправки и другая служебная информация передаются на борт ВС через передатчик VDB входящий в состав GBAS в формате сигнала соответствующего SARPs ИКАО
GBAS имеет локальную зону действия порядка 50 км.

Рисунок 4. Архитектура системы наземного базирования GBAS
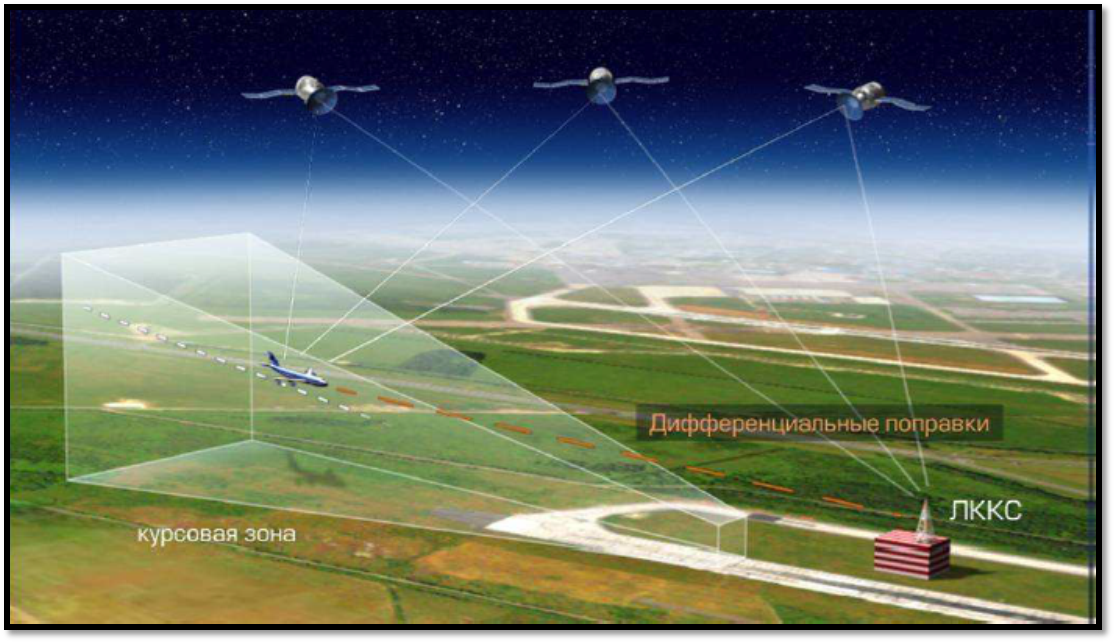
Рисунок 5. Заход на посадку по сигналам ГНСС
Система наблюдения
Введение
Система наблюдения является важнейшим элементом перспективной АНС, позволяющим получать информацию о местоположении и других важных характеристиках ВС на всех этапах полета, а также движении ВС и спецавтотранспорта по рабочей площади аэродрома.
Система наблюдения обеспечивает органы ОрВД оперативной и достоверной информацией, позволяющей воспроизводить на средствах отображения траекторию полета ВС, а также производить прием и обработку дополнительной информации с борта ВС в интересах УВД.
Функция наблюдения заключается в действиях, связанных с определением положения ВС и сопоставлением этой информации с планом полета.
Структура и техническая архитектура системы наблюдения в АНС России представлена на рисунке 1.
В соответствии с действующей классификацией методы наблюдения подразделяются на независимое наблюдение, при котором местоположение каждого ВС определяется одним и тем же независимым средством – это первичные обзорные радиолокаторы (ПОРЛ), вторичные радиолокаторы (ВОРЛ), многопозиционные системы наблюдения (МПСН), радиолокаторы обзора летного поля (РЛС ОЛП), используемые на отдельных аэродромах посадочные радиолокаторы и зависимое наблюдение, при котором местоположение определяется непосредственно на борту каждого ВС с помощью, например, данных глобальной навигационной спутниковой системы – GNSS и передается по речевой связи или линиям передачи данных на землю и окружающим воздушным судам. К этим методам относится метод автоматического зависимого наблюдения - вещательное (АЗН-В) и контрактное или адресное (АЗН-А).
Рисунок 1. Структура системы наблюдения.





