Навигационные системы, использующие искусственные спутники Земли, становятся основным средством наземной, воздушной и морской навигаций.
Первым шагом в этом направлении было создание низкоорбитальных спутниковых систем: отечественной "Цикады" и американской "Транзит". Следующим этапом явилась реализация программ по созданию глобальных навигационных спутниковых систем — российской ГЛОНАСС и американской NAVSTAR (GPS). Обе они сейчас находятся в эксплуатации.
Основными требованиями к навигационным системам являются высокая точность местоопределения, глобальность действия, а также получение навигационного радиосигнала в любое время суток. К важнейшим качествам современных навигационных средств относятся их независимость от погодных условий, надежность работы и возможность свободного доступа неограниченному числу пользователей.
Всем этим требованиям соответствует система ГЛОНАСС, обладающая более высокой точностью и оперативностью, чем ранее развернутые низкоорбитальные системы. Установка на борту навигационных спутников атомных стандартов частоты позволяет использовать эту систему и для измерений в интересах службы времени.
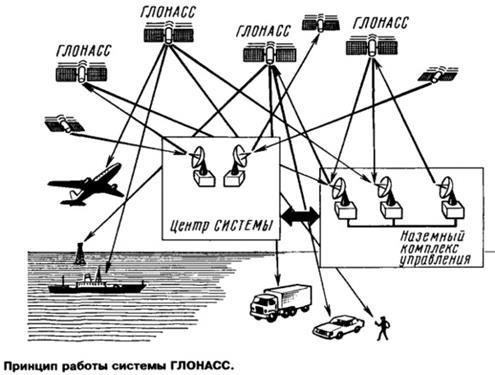
ГЛОНАСС дает возможность пользователю определять координаты местоположения, скорость движения и точное время. Каждый спутник (всего их в орбитальной группировке 24) непрерывно излучает навигационный радиосигнал. Аппаратура пользователя одновременно принимает сигналы от четырех ИСЗ ГЛОНАСС и автоматически определяет беззапросным способом дальность до этих спутников и скорость их движения. При необходимости определить только две координаты объекта (горизонтальные, например на поверхности моря) навигационной аппаратуре пользователя достаточно сигналов от трех спутников. По результатам этих измерений и с помощью цифровой информации, передаваемой со спутников, после ее обработки автоматически решается навигационная задача:
определяются местоположение пользователя и другие параметры. При этом навигационная задача может быть решена с момента первого включения аппаратуры в течение нескольких минут, с последующим определением через каждую секунду.
Навигационная информация незаменима при геодезических работах, составлении земельных кадастров, прокладке коммуникаций. Она необходима геологам при разработке и обустройстве нефтяных и газовых месторождений, в том числе и на прибрежных шельфах.
Система ГЛОНАСС открыла новые возможности для научных исследований и решения прикладных задач. Этот перечень может быть достаточно широким — от определения смещения горных массивов, литосферных плит, сейсмических измерений до прецизионных измерений в интересах геодинамики и радиоастрономии, синхронизации шкал времени удаленных друг от друга объектов.
Еще одна область применения навигационной информации — организация поисково-спасательных работ.
В системе ГЛОНАСС принято частотное разделение каналов. Каждый спутник в диапазоне 1600 МГц излучает навигационный радиосигнал на своей несущей частоте, отличной от частот других ИСЗ.
Навигационные данные могут выводиться на табло в виде числовых значений координат, скорости и времени, а также отображаться на электронных картах в графическом изображении маршрута движения.
Системы координат могут выбираться пользователями в зависимости от их потребностей.
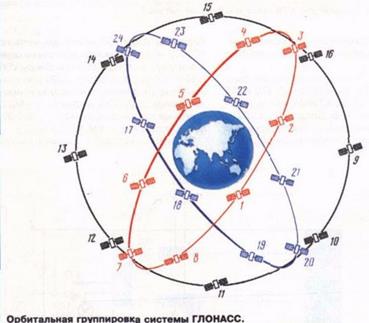
В состав системы ГЛОНАСС входит, как уже отмечалось, орбитальная группировка из 24 спутников, находящихся на круговых орбитах на высоте 19100 км. Они были запущены и будут запускаться для восполнения группировки с космодрома "Байконур" ракетой-носителем тяжелого класса "Протон" со специальным разгонным блоком по три спутника сразу. Причем масса каждого из них составляет более 13000 кг. Спутники расположены в трех орбитальных плоскостях, разнесенных на 120°. В каждой плоскости находится восемь ИСЗ, которые удалены друг от друга на 45° по широте. Период обращения каждого спутника вокруг Земли — 11 ч 15 мин.
Такое построение орбитальной группировки позволяет создать оптимальные условия для непрерывного и глобального обеспечения всей поверхности Земли радионавигационными сигналами. Это дает возможность пользователю со среднеквадратической ошибкой около 20 м устанавливать свои координаты и с погрешностью не хуже чем 15 см/с определять скорость.
Для этого на каждом спутнике имеется навигационный комплекс, который формирует навигационное сообщение и излучает его на Землю со скоростью 50 бит/с. Излучаемый радионавигационный сигнал содержит эфемериды спутника (данные о его местоположении на орбите на каждый момент времени), служебные данные, информацию об исправности бортового комплекса.
"Сердцем" бортового комплекса является высокостабильный генератор с относительным уходом частоты за сутки 5-10с. Он служит основным источником для создания бортовой шкалы времени и обеспечивает синхронизацию всех процессов, проходящих в системе ГЛОНАСС. Важнейшую роль играет также бортовая ЭВМ, которая "запоминает" и обрабатывает принимаемую с наземных пунктов управления информацию и обеспечивает выполнение программы работы специальных бортовых систем.
В передаваемом с борта сигнале содержится информация о положении всех других спутников на орбите. Эта информация включает в себя начальные условия движения ИСЗ, что позволяет пользователю с помощью навигационной аппаратуры выбирать оптимальные созвездия спутников для точного определения своего местоположения.
Управление спутниками осуществляется с наземного комплекса. В него входят Центр управления, расположенный под Москвой, и станции измерения и контроля, рассредоточенные на территории России: в Москве, Санкт-Петербурге, Енисейске, Комсомольске-на-Амуре.
Наземный комплекс управления контролирует правильность функционирования орбитальной группировки, измеряет параметры орбит ИСЗ, передает на спутники программу работ и специальную информацию.
Передача информации на наземный комплекс управления и передача навигационной информации пользователям производится по разным радиоканалам.
Для того, чтобы все процессы в такой сложной системе происходили в одной шкале времени, в состав аппаратуры Центра управления включен центральный синхронизатор. Его основа — высокостабильный водородный генератор частоты, обеспечивающий на порядок более высокую суточную относительную нестабильность, чем генератор, который установлен на спутнике. Таким образом, бортовые шкалы времени системы ГЛОНАСС синхронизируются с центральным синхронизатором, а через него — и с государственным эталоном частоты и времени.
Такое построение системы позволяет пользователю получать широкий набор сервисных услуг, помимо определения своих координат и поправки времени. При этом режим работы пользователя — беззапросный, что делает возможным одновременное применение неограниченного числа приемников сигналов системы ГЛОНАСС.
Для пользователей системы ГЛОНАСС российскими предприятиями разработана и выпускается навигационная аппаратура в нескольких модификациях, рассчитанная на массовое производство и применение в различных условиях. В комплект аппаратуры пользователя входят приемник, антенна, процессор и устройство индикации общим весом 1,5—2,5 кг.
Приемники аппаратуры — многоканальные, могут принимать одновременно сигналы от 6—12 спутников, находящихся в зоне видимости пользователя. Кроме того, они могут настраиваться на передатчики системы NAVSTAR. Все это позволяет выбрать оптимальное созвездие спутников для повышения точности измерений.
Массогабаритные характеристики отечественной аппаратуры близки к зарубежным аналогам и позволяют использовать ее на личных автомобилях, на яхтах, а также в геологических партиях.
Несмотря на высокую точность определения местонахождения объектов, получаемую в настоящее время с помощью
системы ГЛОНАСС, широко развернуты работы, направленные на дальнейшее повышение ее технических характеристик и устойчивости функционирования в различных условиях. Одно из таких направлений связано с использованием режима дифференциальных навигационных определений.
Внимание к дифференциальному режиму вызвано необходимостью обеспечивать решение некоторых задач, например, определения координат с точностью до нескольких сантиметров.
В основе дифференциального метода лежит формирование разности отсчетов, что и определило его название — дифференциальный.
Сущность метода заключается в том, что наземные опорные станции, координаты которых известны, с высокой точностью осуществляют непрерывные измерения параметров спутников ГЛОНАСС, находящихся в зоне видимости. В результате обработки полученных данных эти станции вырабатывают дифференциальные поправки и передают их в навигационную аппаратуру пользователя, которая использует их для компенсаций систематических погрешностей в своих измерениях.
Практическим стимулом применения этого режима была необходимость использования спутниковых навигационных систем для посадки самолетов. Поэтому современная аппаратура пользователя может работать в дифференциальном режиме.
В настоящее время в дифференциальном режиме в сочетании со специальными техническими измерениями и программно-математическими методами удается достигать точностей до нескольких сантиметров.
По оперативности и точности аппаратура системы ГЛОНАСС находится на уровне лучших мировых аналогов. Это стало возможным благодаря использованию последних достижений в развитии элементной базы с высокой степенью быстродействия и интеграции.
Тем не менее, к сожалению, по количеству модификаций отечественная аппаратура пользователя не столь разнообразна, как зарубежная. Объясняется это, прежде всего, недостаточным финансированием разработчиков и заводов-изготовителей серийной аппаратуры. Этим не замедлили воспользоваться зарубежные фирмы, прежде всего в США. В России и государствах СНГ появилась дешевая аппаратура пользователя нового поколения. В результате произошло смещение спроса в пользу зарубежных образцов, а отечественной технике приходится вести нелегкую конкурентную борьбу.
Однако несмотря на это, близкий научно-технический уровень российской и американской систем навигации вызывает интерес к сотрудничеству. По предложению российской и американской сторон в международных организациях по авиации (ИКАО) и морского флота (ИМО) рассматривается вопрос о совместном использовании систем ГЛОНАСС и NAVSTAR. Это дало бы возможность повысить точность получения навигационной информации, так как пользователи могли бы выбирать оптимальное созвездие из большего числа видимых спутников, доходящего до 16—20, и пользоваться приемниками с числом каналов 12 и более.
Совмещение глобальных систем навигации, несомненно, ведет к большей достоверности навигационных определений за счет избыточности навигационных спутников в зоне видимости пользователя. А это позволит расширить рамки использования систем, в том числе для такой сложной операции, как заход самолетов на посадку, что привлечет дополнительное число пользователей.
В настоящее время постоянно растут требования пользователей к навигационному обеспечению. Это учитывают предприятия-разработчики ГЛОНАСС, в числе которых такие известные коллективы, как НПО прикладной механики, Российский НИИ космического приборостроения, Российский институт радионавигации и времени. Их усилия направлены на то, чтобы еще больше повысить точность навигационных определений, поднять надежность и срок службы бортового комплекса и аппаратуры пользователя, добиться большей совместимости ГЛОНАССа с другими радиотехническими системами.
Несомненно, высокий научно-технический потенциал отечественных разработчиков, их сотрудничество в международном масштабе приведут к новому качественному скачку в глобальной навигации.

ШТУРМАНСКАЯ ПОДГОТОВКА К ПОЛЕТУ
Общая подготовка полетных карт
Общая подготовка полетной карты заключается в подборе и склейке листов, выделении госграницы, отметок основных высот местности и препятствий, угрожающих безопасности полета, выделении характерных визуальных и радиолокационных ориентиров, нанесении отметок магнитного склонения, отметок мест дислокации, наземных средств РТО.
При подборе листов полетных карт для заданного маршрута следует учитывать, что обрез крайнего листа должен быть удален от линии заданного пути не менее чем на 200 км. При большом количестве листов допускается подготовка полетной карты по частям с перекрытием отдельных частей района.
Склеивание карты.
После отбора нужных листов карты их склеивают в следующем порядке: северный лист наклеивается на южный, а западный на восточный. У наклеиваемого листа обрезается нижняя и правая кромки по внутренней рамке Склеивая карту, необходимо следить, чтобы меридианы и параллели, а также линейные ориентиры соседних листов точно совпадали.
Рекомендуется сначала склеивать листы карт по колонкам, а затем колонки склеивать между собой.
После склейки листов и прокладки маршрута на карте ее складывают так, чтобы было удобно пользоваться. Для этого намечают нужную полосу карты. Лишние края подгибаются. Полученная полоса карты складывается в «гармошку». Переворачивая звенья «гармошки», можно
быстро, не прибегая к полному разворачиванию карты, найти тот район, который нужен для обзора.
При наличии на самолете панорамной радиолокационной станции на карте цветными карандашами выделяются характерные радиолокационные ориентиры (озера, изгибы рек с крутыми берегами - синим цветом, искусственные сооружения типа мостов и плотин, населенные' пункты - красным цветом). При этом надо сохранять действительную конфигурацию ориентиров. В тех случаях, когда конфигурация ориентира на карте не соответствует конфигурации радиолокационного изображения, необходимо выделять его в соответствии с радиолокационным изображением. Радионавигационные точки (РНТ) наносят условными знаками. Места расположения РНТ обозначают отрезками взаимно перпендикулярных прямых (20 X. 50 мм) с пересечением в месте установки, наземной станции.
Для облегчения работы по определению места самолета с помощью угломерно-дальномерной системы на, полетных картах масштаба 1:1000000 и мельче наносят линии пеленгов.
На картах масштаба 1:1000000 и крупнее около отметки РНТ указывают сведения о характере ее работы. Запись производят дробью: в числителе - позывные, в знаменателе - частота или номер канала. На этих картах разрешается наносить месторасположение основных и запасных аэродромов.
На картах масштаба 1:2000 000 и мельче около отметки РНТ указывают лишь ее номер, под которым в бортовом журнале штурмана и летчика (пилота) должны быть записаны сведения о характере ее работы.
Бортовые карты должны охватывать район (в обе стороны от ЛЗП) полосой 400 км для самолетов с поршневыми двигателями и 700 км - для самолетов с газотурбинными двигателями.
В целях пеленгации на бортовые карты наносят местонахождение радиотехнических средств и линии предвычисленных пеленгов от этих средств на аэродромы и контрольные ориентиры по маршруту полета. Кроме того, отмечают пеленгационные круги с разметкой на 360°, центром которых является место РНТ. При полетах вблизи Государственной границы РФ должны быть размечены красным цветом ограничительные пеленги, ближе которых подходить к границе запрещается.
Прокладка маршрута
Прокладка маршрута на полетной карте включает:
прокладку линии пути;
отметку основных точек маршрута;
разметку расстояний, путевых углов, времени полета и отрезков пути по времени;
отметку расчетного времени прибытия на цель, рельефа и магнитных склонений;
нанесение на карту необходимых данных для использования курсовой системы, координатной сетки для радиотехнических систем и комплексных систем самолетовождения.
Основные точки маршрута обводят окружностями диаметром 10-15 мм мягким карандашом. Цель обозначают красным крестом в кружке красного цвета (Рис. 67).
Линию заданного пути (ЛЗП) наносят от исходного пункта маршрута ИПМ до конечного пункта маршрута КПМ сплошной линией, четко выделяющейся на фоне карты. Линия пути от аэродрома взлета до ИПМ, от КПМ до аэродрома посадки и внутри окружностей основных точек маршрута не проводится и в этих местах карты никаких отметок не делается.
При прокладке маршрута необходимо учитывать радиус разворота самолета. Поворотные пункты маршрута в этом случае принимают за точки начала разворота на очередные участки маршрута. Для определения и нанесения точки начала разворота на карту рассчитывают линейное упреждение разворота ЛУР по формуле:
где R -радиус разворота самолета;
УР -угол разворота.
Криволинейные участки ЛЗП прокладывают с помощью циркуля, командирской линейки или специально подготовленного шаблона навигационного транспортира. Прямолинейные участки маршрута прокладывают с помощью масштабной линейки.
Разметку расстояний и времени полета по участкам маршрута наносят у начала каждого этапа маршрута справа по направлению ЛЗП в виде дроби: в числителе - расстояние в километрах, в знаменателе - штилевое время полета между ориентирами в минутах и секундах.
Длину прямолинейных участков маршрута снимают с полетной карты, а длину участка разворота определяют по формуле S» R •УР•0,0175. Общую длину маршрута находят как сумму расстояний от ИПМ до КПМ.
Магнитные путевые углы МПУ наносят справа от разметки расстояний и путевого времени красным цветом у поворотного пункта маршрута ППМ, через каждые 15-20 см прямолинейного участка маршрута и при изменении магнитного склонения более чем на 1°.
При полете по замкнутому маршруту с правыми разворотами разметку пути разрешается производить слева от линии пути. Для удобства счисления пройденного и оставшегося расстояния делают разметку пути на участках от ИПМ до цели и от исходного пункта обратного маршрута ИПОМ до КПМ. Величина отрезков при разметке пути, как правило, берется равной 50-100 км или соответственно 2-5 мин полета. Отрезки пути обозначают штрихами вправо от линии пути с оцифровкой в сотнях километров или в минутах, причем оцифровка может производиться как по пройденному (от ИПМ или ИПОМ), так и по оставшемуся (до цели или КПМ) расстоянию. Все цифры записывают размером 7-10 мм.
Заданное (расчетное) время прибытия на цель (контрольный ориентир КО) наносят справа от цели красным карандашом. Над отметкой времени проводят черту, над которой в полете записывают фактическое время прохода цели (КО) с точностью до секунды.
Отметку превышения местности у цели или у аэродрома посадки относительно аэродрома взлета более 50 м наносят черным карандашом цифрами в метрах и обводят прямоугольником. Превышение местности относительно аэродрома взлета обозначают знаком плюс (+), принижение - знаком минус (-).
Отметки характерных высот местности, имеющих значение для безопасности полета и ориентировки, находящиеся вблизи маршрута, обводят черным прямоугольником.
Величину магнитного склонения Dм наносят на карту, как правило, через каждые 20-25 см маршрута или при изменении склонения более чем на 1°. Склонение обозначают в стороне от линии пути на видном месте красной цифрой со своим знаком и обводят красным кружком.
Для облегчения отыскания цели готовят карту крупного масштаба. На этой карте прокладывают линию пути от точки разворота на цель ТРЦ до НБП с разметкой расстояния, штилевого времени и путевого угла и наносят путевой угол ПУ и время полета от НБП до цели. У цели отмечают превышение местности относительно аэродрома взлета. Цель обозначают крестом в кружке красным цветом. В качестве карты района цели используются карты масштаба 1:200000 и крупнее.
При перелетах на незнакомый аэродром также готовят карту крупного масштаба с нанесенной на нее схемой захода на посадку, установленной для данного аэродрома.
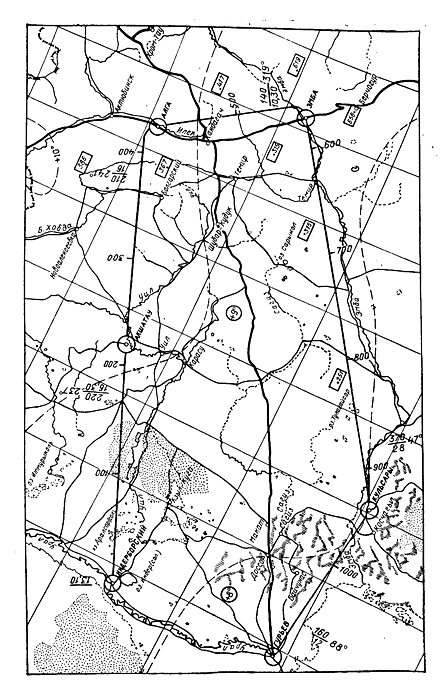
Рис. 67. Прокладка маршрута.
Расчет полета
Расчет полета подразделяется на предварительный и окончательный.
Предварительный расчет полета производят по истинной воздушной скорости полета без учета ветра. Данные этого расчета наносят на карту и записывают в левую часть бортового журнала штурмана и в таблицу расчета полета летчика. В зависимости от заданного времени выхода на цель предварительно рассчитывают продолжительность полета, потребное количество топлива, время взлета, прохода ИПМ и т.п.
К предварительному расчету относится инженерно-штурманский расчет полета, который выполняют согласно инструкции по расчету дальности и продолжительности полета самолета данного типа (когда длина маршрута превышает 75% практической дальности для заданного режима полета и при неполной заправке горючим).
Исходными данными для расчета являются:
запас горючего на самолете;
масса нагрузки и место ее сбрасывания (выброски);
маршрут, высота и.скорость полета по этапам;
время полета до ИПМ и маневра лад целью, от КПМ до аэродрома посадки и захода на посадку по установленной схеме;
запас горючего, потребный для повторного захода на посадку по установленной схеме и выполнения посадки;
направление и скорость ветра, температура наружного воздуха по участкам маршрута;
гарантийный запас горючего на разброс технических характеристик самолета и двигателя;
5%-ный Навигационный запас горючего на возможное изменение ветра, учет ошибок в его определении или прогнозировании, берущийся от горючего, расходуемого на полет по маршруту;
запас горючего на возможное изменение тактической, навигационной, метеорологической обстановки в полете, определяемый в зависимости от конкретных условий.
В результате инженерно-штурманского расчета определяют:
общее расстояние и продолжительность полета;
расход горючего по этапам полета и его остаток у контрольных ориентиров в зависимости от полетной массы самолета с учетом гарантийных запасов;
остаток горючего при выходе на аэродром и после посадки;
необходимое количество заправляемого горючего.
Окончательный расчет полета выполняют перед вылетом с учетом данных о ветре, полученных от разведчиков погоды по маршруту, или на основании метеорологических данных давностью не более 3 ч. Данные шаропилотного ветра в районе аэродрома должны быть давностью не более 1 ч.
Общая продолжительность полета от взлета до посадки рассчитывается по формуле:
t общ = t до ИПМ + t м + t ц + t после КПМ,
где t м -время полета по маршруту от ИПМ до КПМ;
t ц -время, затрачиваемое на маневр в районе цели (повторный заход на цель);
t после КПМ - время полета от КПМ до посадки.
Время взлета определяется из условия выхода на цель (КО) в заданное время:
Твзл=Тц. зад- t доИПМ - t до ц.
Для учета влияния ветра на полет самолета и ошибок выдерживания режима и маршрута полета до. t ц следует увеличить на 1-3%.
Время прохода ИПМ. рассчитывается по формуле:
Типм = Твзл + t до ИПМ
Время посадки определяется по формуле:
Тпос = Твзл + t общ.
где t общ -общая продолжительность полета от взлета до посадки, увеличенная на 1-3% времени полета от взлета до цели.
Одновременно с расчетом времени посадки при дневных полетах рассчитывают время захода солнца и наступления темноты, а при ночных полетах - время восхода и захода луны и время наступления рассвета и восхода солнца.
Для каждого маршрутного полета устанавливается безопасная высота полета, исключающая возможность столкновения с земной поверхностью и искусственными препятствиями.
Все данные расчета полета, заносят в бортжурнал штурмана и в таблицу расчета полета летчика. Сюда же записывают данные средств РТО по маршруту, метеорологические данные.






