В магнитном компасе используется свойство свободно подвешенной магнитной стрелки устанавливаться в плоскости магнитного меридиана. Компасы делятся на совмещенные и дистанционные.
У совмещенных магнитных компасов шкала отсчета курса и чувствительный элемент (магнитная система) жестко закреплены на подвижном основании - картушке. В настоящее время на самолетах, вертолетах и планерах устанавливают совмещенные магнитные компасы типа КИ (КИ-11, КИ-12, КИ-13), они служат в качестве путевых компасов летчика и дополнительных компасов на случай отказа курсовых приборов.
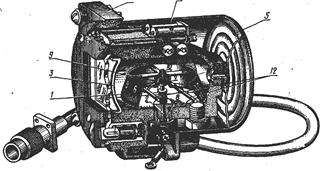
Основными преимуществами совмещенных компасов являются: простота конструкции, надежность действия, малая масса и габариты, простота обслуживания. На Рис. 22 показан разрез магнитного жидкостного компаса типа КИ-12. Основными частями компаса являются: чувствительный элемент (картушка).7 (магнитная система компаса), колонка 2, курсовая черта 3, корпус 4, мембрана 5 и девиационный прибор 6.
В центре корпуса помещена колонка 2 с подпятником 7. Для ограничения вертикального перемещения колонки служит пружинная шайба 8. Во втулку 9 картушки запрессован керн 10, которым она упирается на подпятник 7. Втулка имеет пружинное кольцо 11, предохраняющее картушку от соскакивания с колонки при перевертывании компаса. Колонка имеет пружинную амортизацию, смягчающую действие вертикальных ударов.
Шкала картушки равномерная, с ценой деления 5° и оцифровкой через 30°.- Картушка окрашена в черный цвет, а цифры и удлиненные деления шкалы покрыты светящейся массой.
На втулке укреплен держатель с двумя магнитами 12. Оси магнитов параллельны линии С - Ю шкалы.
Девиационный прибор, служащий для устранения полукруговой девиации, установлен в верхней части корпуса. Девиационный прибор состоит из двух продольных и двух поперечных валиков, в которые запрессованы постоянные магниты.
| 
|
| Рис. 22. Разрез компаса КИ-12
| Рис. 23 Внешний вид компаса КИ-13
|
Валики с помощью зубчатого зацепления попарно связаны друг с другом и приводятся во вращение удлиненными валиками со шлицами.
В крышке компаса имеется два отверстия с обозначениями С - Ю и В - 3, через которые можно с помощью отвертки вращать валики. При вращении продольных валиков с магнитами создается дополнительное магнитное поле, направленное поперек самолета, а при вращении поперечных валиков создается продольное магнитное поле.
В корпус компаса заливается лигроин, который обеспечивает демпфирование колебаний картушки.
Для компенсации изменения объема жидкости при изменении температуры в компасе имеется мембрана 5, сообщающаяся с корпусом специальным отверстием.
В нижней части компаса установлена лампочка подсвета. Свет от лампочки через прорезь в корпусе падает на торец смотрового стекла, рассеивается и освещает шкалу компаса.
Компас КИ-13 (Рис. 23) в отличие от компаса КИ-12 имеет меньшие габариты и массу, а также сферический корпус, обеспечивающий хорошее наблюдение за шкалой прибора. В верхней части компаса имеется уводящая камера для компенсации изменения объема компасной жидкости. Девиационный прибор компаса устроен аналогично девиационному прибору компаса КИ-12, но отсутствует индивидуальный подсвет.
Дистанционными называются компасы, у которых показания передаются специальному указателю, установленному на некотором расстоянии от магнитной системы.
На самолетах и вертолетах устанавливают гироиндукционный компас ГИК-1, он служит для указания магнитного курса и измерения углов разворота самолета. При совместной работе с автоматическим радиокомпасом по шкале указателя гиромагнитного курса и радиопеленгов УГР-1 можно отсчитать курсовые углы радиостанций и магнитные пеленги радиостанций и самолета.
Принцип действия компаса ГИК-1 основан на свойстве индукционного чувствительного элемента определять направление магнитного поля Земли и свойстве гирополукомпаса указывать относительный курс полета самолета.
В комплект ГИК-1 входят: индукционный датчик ИД-2, коррекционный механизм КМ, гироскопический агрегат Г-ЗМ, указатели УГР-1 и УГР-2, усилитель У-6М.
Индукционный датчик измеряет направление горизонтальной составляющей вектора напряженности магнитного поля Земли. Для этой цели в датчике использована система из трех одинаковых чувствительных элементов индукционного типа, расположенных в горизонтальной плоскости по сторонам равностороннего треугольника чувствительных элементов.
Намагничивающие обмотки треугольника чувствительных элементов питаются переменным током частоты 400 Гц и напряжением 1,7 В от понижающего трансформатора, расположенного в соединительной коробке СК.
Рис. 24. Конструкция индукционного датчика
1 - сердечник чувствительного элемента; 2 - катушка намагничивания; 3 - сигнальная катушка; 4-пластмассовая платформа чувствительных элементов;5-внутреннее кольцо кардана;. 6-полая ось кардана; 7-пробка; 8-поплавок; 9 - девиационный прибор; 10 - зажимное кольцо; // - зажим; 12 - крышка; 13-уплотнительяая прокладка; 14-наружное кольцо кардана; 15 - корпус датчика; 16,- полая ось кардана; 17- чашка; 18-груз
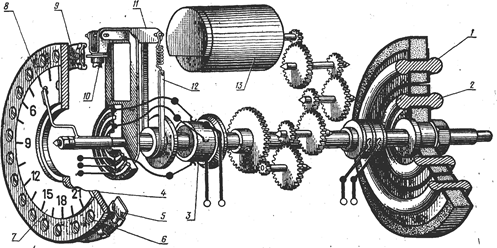
Рис. 25, Конструкция коррекционного механизма
1-статорная обмотка сельсин-приемника; 2- роторная обмотка сельсин-приемника;3-щетки потенциометров; 4 -основание; 5 -лекальная лента; 6 -головка девиационного винта; 7 - шкала 8 - стрелка 9 - девиационный винт 10 - ролик; 11 - качающийся рычажок; 12 - гибкая лента! 13 -отрабатывающий двигатель ДИД-0,5,
Сигнальные обмотки соединены со статорными обмотками сельсин-приемника коррекционного механизма КМ.
Конструкция индукционного датчика приведена на Рис. 24.
Коррекционный механизм КМ предназначен для связи индукционного датчика с гироагрегатом и для устранения остаточной девиации и инструментальных погрешностей системы.
Конструкция коррекционного механизма показана на Рис. 25.
Указатель УГР-1 (Рис. 26) показывает магнитный курс и углы разворота самолета по шкале курса 1 относительно неподвижного индекса 2. Пеленги радиостанций и самолета определяются по положению стрелки радиокомпаса 5 относительно шкалы 1. Курсовой угол радиостанции отсчитывается по шкале 7 и стрелке 5.

Рис. 26. Указатель УГР-1
Для выполнения разворотов на 90° служат треугольные индексы. Стрелка курсозадатчика 3 устанавливается ручкой кремальеры 4. Ось стрелки радиокомпаса поворачивается сельсин-приемником, который соединен с сельсин-датчиком рамки автоматического радиокомпаса. Погрешность дистанционной передачи от гироагрегата в указатель УГР-1 устраняется с помощью лекального устройства.
Гироиндукционный компас ГИК-1 позволяет отсчитывать магнитный курс самолета по указателю УГР-1 с погрешностью ±1,5°. Магнитный пеленг радиостанции определяется с точностью ±3,5°. Послевиражная погрешность ГИК-1 за 1 мин разворота составляет 1°.
На современных самолетах устанавливаются централизованные устройства, рационально объединяющие гироскопические, магнитные, астрономические и радиотехнические средства определения курса. Это позволяет использовать одни и те же комбинированные указатели и повышает надежность и точность измерения курса. Такие устройства получили название курсовых систем. В курсовую систему, как правило, входят магнитный датчик курса индукционного типа, гироскопический датчик курса, астрономический датчик курса и радиокомпас. С помощью этих приборов, каждый из которых может использоваться как автономно, так и в комплексе друг с другом, обеспечиваются определение и выдерживание курса в любых условиях полета. Такой комплекс курсовых приборов позволяет определять на указателях значения истинного, магнитного, условного (гирополукомпасного) и ортодромического курсов, соответствующих углов радиостанции и углов разворота самолета, выдавая при необходимости любую из этих величин потребителям.
Основой курсовой системы является гироскопический датчик курса - курсовой гироскоп, периодическое исправление показаний которого осуществляется с помощью магнитного или астрономического датчика (корректора) курса.
Для уменьшения погрешностей при, измерении курса, вызываемых кренами, курсовой гироскоп связан с центральной гировертикалью; для уменьшения ошибок в курсе за счет ускорений он получает сигналы от выключателя коррекции, а чтобы, исключить ошибку за счет вращения Земли, в него вручную вводится сигнал, пропорциональный географической широте местонахождения самолета.
В зависимости от решаемых задач курсовая система может работать в одном из трех режимов: гирополукомпаса, магнитной коррекции, астрономической коррекции. Основным режимом работы курсовой системы любого типа является режим гирополукомпаса.
Курсовая система ГМК-1А
Курсовая система ГМК-1А устанавливается на спортивных самолетах и вертолетах, предназначена для измерения и указания курса и углов разворота самолета (вертолета). При работе совместно с радиокомпасами АРК-9 и АРК-15 ГМК-1А позволяет отсчитывать курсовой угол радиостанции и радиопеленг.
| Основные данные ГМК-1а
|
| Напряжение питания постоянного тока
| 27 В ±10%;
|
| Напряжение питания переменного тока
| 36 В +5%,-10%;
|
| Частота переменного тока
| 400 Гц ±2%;
|
| Допустимая погрешность в определении ИК
| ±1,5°;
|
| Допустимая погрешность в определении КУР
| ±2,5°.
|
Гироагрегат ГА-6 -основной агрегат курсовой системы, со статора сельсина которого снимаются сигналы ортодромического, истинного и магнитного курсов.
Индукционный датчик ИД-3 является чувствительным элементом азимутальной магнитной коррекции гироскопа. Датчик определяет направление горизонтальной составляющей вектора напряженности магнитного поля Земли. Для крепления датчика на самолете (вертолете) в основании корпуса имеются три овальных отверстия, рядом с которыми на основании корпуса нанесены деления, позволяющие отсчитывать угол установки датчика в диапазоне ±20° (цена деления 2°).
Коррекционный механизм КМ-8- промежуточный агрегат в линии связи индукционного датчика с гироагрегатом и предназначен для компенсации девиации курсовой системы и инструментальных погрешностей, ввода магнитного склонения, указания компасного курса и контроля работоспособности курсовой системы путем сравнения показаний КМ-8 и УГР-4УК.
Автомат согласования АС-1 - промежуточный агрегат в линии связи коррекционного механизма с гироагрегатом. Он предназначен для усиления электрических сигналов, пропорциональных магнитному или истинному курсам, отключения азимутальной, магнитной и горизонтальной коррекции и ограничения продолжительности запуска курсовой системы.
Указатель УГР-4УК является комбинированным прибором, предназначенным для указания ортодромического (в режиме ГПК), магнитного или истинного (в режиме МК) курсов самолета, углов разворота и радиопеленга или курсового угла радиостанции.
Пульт управления служит для управления работой ГМК-1 А и позволяет осуществлять: выбор режима работы курсовой системы; ввод азимутальной широтной коррекции гироскопа; компенсацию погрешностей от уходов гироскопа в азимуте (от несбалансированности); установку курсовой шкалы указателя УГР-4УК на заданный курс; включение быстрой скорости согласования гироскопа; сигнализацию завала гироскопа гироагрегата; контроль работоспособности курсовой системы.
Курсовая система ГМК-1А может работать в двух режимах: в режиме гирополукомпаса (ГПК) и режиме магнитной коррекции гироскопа (МК). Режим ГПК является основным режимом работы системы. Режим МК используется при первоначальном 'а согласовании курсовой системы после ее включения, а также периодически в процессе ее работы в полете.
Девиация магнитного компаса
Ошибка магнитного компаса, обусловленная влиянием собственного магнитного поля самолета, называется девиацией.
Магнитное поле самолета создается ферромагнитными деталями самолета: и самолетного оборудования и постоянными токами в сетях электро- и радиооборудования самолета..
Зависимость девиации от магнитного курса самолета в горизонтальном полете без ускорений выражается приближенной формулой:
Dк=А+В sinМК+С со sМК+ D sin2МК+ cosЕ cosМК,
где А - постоянная девиация;
B и С - приближенные коэффициенты полукруговой девиации;
D и Е - приближенные коэффициенты четвертной девиации.
В целях повышения точности измерения курса на самолетах периодически проводятся девиационные работы, в процессе которых компенсируются постоянная и полукруговая девиация и списывается четвертная девиация.
Постоянная девиация вместе с установочной ошибкой устраняется поворотом датчика дистанционного компаса и поворотом корпуса совмещенного компаса.
Полукруговая девиация компенсируется на четырех основных курсах (0°, 90°, 180° и 270°)с помощью магнитного девиационного прибора, установленного на корпусе компаса (индукционного датчика). С помощью магнитов, помещенных в девиационном приборе в непосредственной близости к чувствительному элементу компаса, создаются силы, равные по величине и обратные по направлению тем силам, которые вызывают полукруговую девиацию (В' и С').
Четвертная девиация вызывается переменным магнитным полем самолета (силами D ' и Е'), поэтому она не может быть скомпенсирована постоянными магнитами девиационного прибора. Четвертная девиация вместе с инструментальными ошибками в дистанционных компасах (ГИК-1) компенсируется с помощью механического компенсатора девиации лекального типа.
В совмещенных магнитных компасах четвертная девиация не устраняется, ее величина определяется на восьми курсах (0е, 45°, 90°, 135°, 180°, 225°, 270° и 315°) и по найденным значениям составляются графики остаточной девиации.
Креновой девиацией называется дополнительная девиация, возникающая при кренах самолета, наборе высоты или снижении в результате изменения положения деталей самолета, обладающих магнитными свойствами, относительно магнитной системы компаса.
При поперечных кренах максимальная девиация будет на курсах 0 и 180°, а минимальная - на курсах 90 и 270°. При продольных кренах на курсах 0 и 180 ° она равна нулю и достигает своего максимального значения на курсах 90 и 270 °. Наибольшего значения креновая девиация достигает при продольных кренах (набор высоты и снижение).
Самолетные компасы не имеют специальных устройств для устранения креновой девиации, однако при длительном наборе высоты (снижении) на магнитных курсах, близких к 90° (270°), влияние креновой девиации значительно, поэтому определение и выдерживание курса должно выполняться при помощи гирополукомпаса или астрокомпаса.
Поворотная ошибка. Сущность поворотной ошибки заключается в том, что при виражах самолета картушка компаса получает почти такой же крен, как и самолет. Следовательно, картушка подвергается влиянию не только горизонтальной, но и вертикальной составляющей силы земного магнетизма.
В результате картушка при вираже совершает движения, зависящие от магнитного наклонения и угла крена самолета. Движение картушки при этом настолько энергично, что пользование компасом почти невозможно. Наиболее резко эта ошибка проявляется на северных курсах, поэтому она называется северной.
Практически поворотная девиация учитывается следующим образом. При разворотах на северных курсах самолет выводят из виража, не доходя заданного курса на 30 °, а на южных - пройдя 30 ° по показаниям магнитного компаса. Затем мелкими доворотами выводят самолет на заданный курс.
Если развороты выполнять на курсах, близких к 90 или 270 °, самолет надо выводить из виража на заданном курсе, так как поворотная девиация на этих курсах равна 0.






