

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Интересное:
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
МИНОБРНАУКИ РОССИИ
Федеральное государственное образовательное бюджетное учреждение высшего профессионального образования
«Вологодский государственный технический университет»
(ВоГТУ)
Кафедра «Управляющие и вычислительные системы»
МОДЕЛИРОВНИЕ СИСТЕМ
ВВЕДЕНИЕ
Информатизация и моделирование как составные части общей теории систем используются в таких научных направлениях, как: теория управляющих систем; теория оптимального и помехоустойчивого кодирования информации; теория адаптивных систем; экономическая кибернетика; медицинская и нейрокибернетика; инженерная психология и т.д.
Цель математического моделирования систем - использование методов математики для наиболее эффективного решения задач, возникающих в какой либо отрасли знаний, с использование, как правило, современной вычислительной техники.
Задача математического моделирования - упорядочение получения и обработки информации об объектах, которые существуют вне нашего сознания и взаимодействуют между собой и внешней средой.
Предмет моделирования систем — математические модели реальных объектов.
Овладение курсом «Моделирование систем» вызвано практическими задачами, возникающими при проектировании и эксплуатации современных систем управления, использующих информационные технологии. По мере увеличения сложности систем возникают проблемы, меньше связанные с рассмотрением свойств и законов функционирования элементов, а больше — с выбором наилучшей структуры, оптимальной организации взаимодействия элементов, определением оптимальных режимов их функционирования, учетом влияния внешней среды и т.д. Поэтому целесообразно использование системного подхода при анализе и синтезе таких систем. Классический системный подход, как правило, опирается на математическое моделирование с использованием теории подобия, теории научного эксперимента, математической статистики, теории алгоритмов и ряда других фундаментальных классических теорий. В то же время в области проектирования современных информационно-управляющих систем и программного обеспечения ЭВМ при анализе и синтезе сложных систем все большее применение находит так называемый объектно-ориентированный подход.
|
|
Расчетно-графическое задание предназначается для проверки основных положений теории систем, закрепления у студентов теоретических знаний, получения навыков работы с вычислительной техникой при проведении математического и компьютерного моделирования сложных систем.
В результате выполнения РГЗ студент должен приобрести навыки:
РАСЧЕТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ
Для САУ используется модальное управление, как показано на рис.1.
Требуется:
1. Разработать структурную схему модального регулятора с неизвестными пока параметрами li обратных связей и параметрами САУ в соответствии с вариантом задания: Кд и Тм (табл. №1), Ку (табл. №2), Ктп и Ттп (табл. №3);
2. Представить САУ с модальным управлением уравнениями состояния в скалярной форме;
3. Рассчитать параметры li обратных связей в соответствии с вариантом РГЗ. Для заданного времени регулирования tр (табл. №2) и стандартной настройки модального регулятора (табл. №1: Би - биномиальная; Ба – распределение Баттерворта);
|
|
4. Рассчитать параметры настроек наблюдателя ni в соответствии с вариантом РГЗ. Для заданного времени регулирования tр (табл. №2) и стандартной настройки параметровнаблюдателя (табл. №3: Би - биномиальная; Ба – распределение Баттерворта);
5. Представить САУ модального управления с наблюдателем уравнениями состояния в скалярной форме;
6. Разработать структурную схему модели системы модального управления с наблюдателем с рассчитанными числовыми данными.
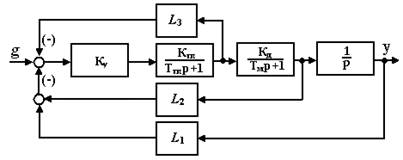
Рис.1
Вариант (шифр) задания выбирается из таблиц №1, №2 и №3. Шифр задания берется по начальным буквам фамилии, имени или отчества студента. Буквам соответствуют следующие цифры:
| Цифра | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
| Буква алфавита | А Л Х | Б М Ц | В Н Ч | Г О Ш | Д П Щ | Е Р Э | Ж С Ю | З Т Я | И У | К Ф |
Таблица №1
| Параметр
| Цифра фамилии | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |
| Кд,рад/В | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | 1,1 | 1,2 | 1,3 | 1,4 |
| Тм,c | 0,5 | 0,55 | 0,6 | 0,65 | 0,7 | 0,75 | 0,6 | 0,5 | 0,8 | 0,65 |
| Настройка мод. рег. | Би | Ба | Би | Ба | Би | Ба | Би | Ба | Би | Ба |
Таблица №2
| Параметр
| Цифра имени | |||||||||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |||||||||||||
| Ку | 2 | 2,5 | 3 | 3,5 | 4 | 4,5 | 5 | 5,5 | 6 | 6,5 | ||||||||||||
| tр, c | 1,5 | 1,6 | 2 | 2,2 | 2,5 | 1,8 | 2 | 2,1 | 1,9 | 1,7 | ||||||||||||
Таблица №3
| Параметр
| Цифра отчества | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |
| Ктп | 7 | 6,5 | 6 | 5,5 | 5 | 4,5 | 4 | 3,5 | 3 | 5 |
| Ттп, c | 0,01 | 0,02 | 0,03 | 0,04 | 0,05 | 0,04 | 0,03 | 0,06 | 0,02 | 0,03 |
| Настройка наблюдателя | Би | Ба | Би | Ба | Би | Ба | Би | Ба | Би | Ба |
МОДАЛЬНОЕ УПРАВЛЕНИЕ
Пример расчета модального регулятора
Рассмотрим задачу синтеза обратной связи для системы управления электроприводом перемещения. Пусть упрощенная линейная модель разомкнутой системы управления описывается дифференциальным уравнением вида

где: Т – постоянная времени привода, учитывающая его инерционность; к – общий статический коэффициент передачи канала управления; j и w – соответственно угол поворота и угловая скорость электродвигателя; u - управляющий сигнал (напряжение управляемого источника питания).
Переходя к изображениям по Лапласу, получим
|
|

где к1×к2 = к. Представим объект управления структурной схемой в виде последовательного соединения апериодического и интегрирующего звеньев рис.1.1.

Рис.1.1
Уравнения объекта в скалярной форме будут иметь вид
Здесь  - переменная состояния, пропорциональная углу поворота электропривода;
- переменная состояния, пропорциональная углу поворота электропривода;  - переменная состояния, пропорциональная угловой скорости электропривода.
- переменная состояния, пропорциональная угловой скорости электропривода.
Уравнение объекта в векторно-матричной форме согласно (1.1)

Отсюда находим



Корни характеристического уравнения разомкнутой системы  следовательно, объект управления является нейтральным. Для обеспечения заданного перемещения введем линейные обратные связи по углу и угловой скорости
следовательно, объект управления является нейтральным. Для обеспечения заданного перемещения введем линейные обратные связи по углу и угловой скорости
u (t) = – l 1 x 1(t) – l 2 x 2(t) + k 0 g (t),
где g – задаваемое значение перемещения.
Тогда замкнутая система с модальным управлением будет иметь вид, показанный на рис.1.2.
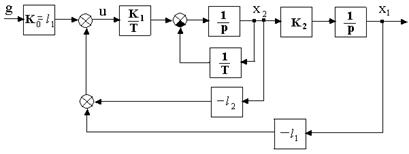
Рис.1.2
Она описывается дифференциальными уравнениями в скалярной форме
 (1.7)
(1.7)
Коэффициент усиления предварительного усилителя К0 найдем из условия обеспечения установившегося перемещения (заданного), т.е. y=x1=g. При этом

Тогда из уравнения (1.7) получим К0 = l1.
Характеристическое уравнение замкнутой САУ с неизвестными параметрами li модального регулятора найдем из уравнения (1.7)
 (1.8)
(1.8)
Если для САУ второго порядка принять коэффициенты желаемого характеристического уравнения (1.7) в соответствии с распределением Баттерворта, т. е.
D(p) = p2 +1,4 w p + w2 = 0 и tp =3/w, (1.9)
то предварительно задавшись требуемым временем переходного процесса tp, приравнивая коэффициенты при одинаковых степенях оператора р в уравнениях (1.8) и (1.9), получим следующие коэффициенты обратных связей (модального регулятора):

 (1.10)
(1.10)
Если для САУ второго порядка принять коэффициенты желаемого характеристического уравнения (1.7) в соответствии с биномиальным распределением, т. е.
D(p) = p2 +2 w p + w2 = 0 и tp @ 3/w, (1.11)
то предварительно задавшись требуемым временем переходного процесса tp, приравнивая коэффициенты при одинаковых степенях оператора р в уравнениях (1.8) и (1.11), получим следующие коэффициенты обратных связей (модального регулятора):
|
|

 (1.12)
(1.12)
Для приведенной САУ модального управления примем следующие значения параметров: T=0,2 c.; k1=10; k2=0,1; tp=0,3 c. Тогда коэффициенты обратных связей модального регулятора, рассчитанные по формулам (1.10) и (1.12), будут иметь значения:
- для биномиального распределения - l1= 20; l2= 0,3;
- для распределения Баттерворта - l1= 20; l2= 0,18.
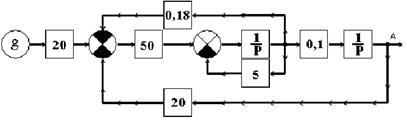
Рис.1.3
На рис.1.3 приведена схема модели системы управления с модальным регулятором, настроенным на распределение Баттерворта.
На рис. 1.4 приведены результаты моделирования САУ с модальным управлением в среде пакета прикладных программ SyAn. На графиках приведены переходные процессы при g(t) = 1 для биномиального распределения (рис.1.4,а) и для распределения Баттерворта (рис.1.4,б).
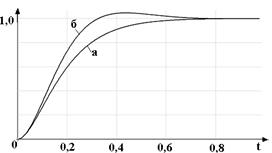
Рис.1.4
При использовании распределения Баттерворта время переходного процесса меньше, чем при использовании биномиальной настройки, но в тоже время появляется перерегулирование. При использовании биномиальной стандартной настройки и стандартного распределения Баттерворта ошибка системы регулирования с нейтральным объектом стремится к нулю. В обоих случаях быстродействие выше, чем при классических оптимальных настройках регуляторов (модульной и симметричной).
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория автоматического управления: учебник для машиностроит. спец. вузов/под ред. Ю. М. Соломенцева.-3-е изд., стер..-М.:Высш. шк., 2000.-268 с.:ил.
2. Ерофеев,А.А. Теория автоматического управления: учебник для вузов по направлениям: «Автоматизация и упр.», «Систем. анализ и упр.»/А.А.Ерофеев. – 2-е изд. доп. и перераб.. - СПб.: Политехника, 2005. - 302 с.: ил.
3. Ротач,В.Я. Теория автоматического управления: учебник для вузов по специальности «Автоматизация технолог. процессов и пр-в (энергетика)»/ В.Я.Ротач. – 3-е изд., стер.. - М.: МЭИ, 2005. –399 с.: ил.
4. Бакаев, В.Н. Теория автоматического управления: учеб. пособие / В.Н. Бакаев. -изд. 2-е перераб. и доп. -Вологда: ВоГТУ, 2004.- 190 с.
5. Бакаев, В.Н. Методические указания к практическим занятиям по курсу «Моделирование систем» / В.Н. Бакаев. -Вологда: ВоГТУ, 2011.- 36 с.
6. Топчеев, Ю.И. Атлас для проектирования систем автоматического регулирования/Ю.И. Топчеев. -М.: Машиностроение, 1989.-752с.
7. Советов, Б.Я. Моделирование систем: учеб. для вузов – 3-е изд., перераб. и доп./Б.Я.Советов, С.А.Яковлев. – М.: Высш. шк., 2001. –343 с.
8. Коршунов, Ю.М. Математические основы кибернетики: учеб. пособие для вузов/Ю.М.Коршунов. - М.: Энергоатомиздат, 1987.- 496 с.
9. Востриков, А.С. Теория автоматического управления: учеб. пособие для вузов по направлению «Автоматизация и упр.»/ А.С.Востриков, Г.А.Французова. - изд. 2-е, стер.. -М.: Высш. шк., 2006.-365с.
|
|
10. Основы теории управления: учеб. пособие для вузов по специальности «Гос. и муниципал. упр.»/под ред. В.Н.Парахиной, Л.И.Ушвицкого. – Финансы и статистика, 2003. - 558 с.: ил.
11. Егоров,А.И. Основы теории управления/А.И.Егоров. - М.: Физматгиз, 2004. - 502 с.: ил.
12. Официальный сайт МИРЕА. Режим доступа: http://www.cpd.mirea.ru/
МИНОБРНАУКИ РОССИИ
Федеральное государственное образовательное бюджетное учреждение высшего профессионального образования
«Вологодский государственный технический университет»
(ВоГТУ)
Кафедра «Управляющие и вычислительные системы»
МОДЕЛИРОВНИЕ СИСТЕМ
ВВЕДЕНИЕ
Информатизация и моделирование как составные части общей теории систем используются в таких научных направлениях, как: теория управляющих систем; теория оптимального и помехоустойчивого кодирования информации; теория адаптивных систем; экономическая кибернетика; медицинская и нейрокибернетика; инженерная психология и т.д.
Цель математического моделирования систем - использование методов математики для наиболее эффективного решения задач, возникающих в какой либо отрасли знаний, с использование, как правило, современной вычислительной техники.
Задача математического моделирования - упорядочение получения и обработки информации об объектах, которые существуют вне нашего сознания и взаимодействуют между собой и внешней средой.
Предмет моделирования систем — математические модели реальных объектов.
Овладение курсом «Моделирование систем» вызвано практическими задачами, возникающими при проектировании и эксплуатации современных систем управления, использующих информационные технологии. По мере увеличения сложности систем возникают проблемы, меньше связанные с рассмотрением свойств и законов функционирования элементов, а больше — с выбором наилучшей структуры, оптимальной организации взаимодействия элементов, определением оптимальных режимов их функционирования, учетом влияния внешней среды и т.д. Поэтому целесообразно использование системного подхода при анализе и синтезе таких систем. Классический системный подход, как правило, опирается на математическое моделирование с использованием теории подобия, теории научного эксперимента, математической статистики, теории алгоритмов и ряда других фундаментальных классических теорий. В то же время в области проектирования современных информационно-управляющих систем и программного обеспечения ЭВМ при анализе и синтезе сложных систем все большее применение находит так называемый объектно-ориентированный подход.
Расчетно-графическое задание предназначается для проверки основных положений теории систем, закрепления у студентов теоретических знаний, получения навыков работы с вычислительной техникой при проведении математического и компьютерного моделирования сложных систем.
В результате выполнения РГЗ студент должен приобрести навыки:
РАСЧЕТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ
Для САУ используется модальное управление, как показано на рис.1.
Требуется:
1. Разработать структурную схему модального регулятора с неизвестными пока параметрами li обратных связей и параметрами САУ в соответствии с вариантом задания: Кд и Тм (табл. №1), Ку (табл. №2), Ктп и Ттп (табл. №3);
2. Представить САУ с модальным управлением уравнениями состояния в скалярной форме;
3. Рассчитать параметры li обратных связей в соответствии с вариантом РГЗ. Для заданного времени регулирования tр (табл. №2) и стандартной настройки модального регулятора (табл. №1: Би - биномиальная; Ба – распределение Баттерворта);
4. Рассчитать параметры настроек наблюдателя ni в соответствии с вариантом РГЗ. Для заданного времени регулирования tр (табл. №2) и стандартной настройки параметровнаблюдателя (табл. №3: Би - биномиальная; Ба – распределение Баттерворта);
5. Представить САУ модального управления с наблюдателем уравнениями состояния в скалярной форме;
6. Разработать структурную схему модели системы модального управления с наблюдателем с рассчитанными числовыми данными.
Рис.1
Вариант (шифр) задания выбирается из таблиц №1, №2 и №3. Шифр задания берется по начальным буквам фамилии, имени или отчества студента. Буквам соответствуют следующие цифры:
| Цифра | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
| Буква алфавита | А Л Х | Б М Ц | В Н Ч | Г О Ш | Д П Щ | Е Р Э | Ж С Ю | З Т Я | И У | К Ф |
Таблица №1
| Параметр
| Цифра фамилии | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |
| Кд,рад/В | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | 1,1 | 1,2 | 1,3 | 1,4 |
| Тм,c | 0,5 | 0,55 | 0,6 | 0,65 | 0,7 | 0,75 | 0,6 | 0,5 | 0,8 | 0,65 |
| Настройка мод. рег. | Би | Ба | Би | Ба | Би | Ба | Би | Ба | Би | Ба |
Таблица №2
| Параметр
| Цифра имени | |||||||||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |||||||||||||
| Ку | 2 | 2,5 | 3 | 3,5 | 4 | 4,5 | 5 | 5,5 | 6 | 6,5 | ||||||||||||
| tр, c | 1,5 | 1,6 | 2 | 2,2 | 2,5 | 1,8 | 2 | 2,1 | 1,9 | 1,7 | ||||||||||||
Таблица №3
| Параметр
| Цифра отчества | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |
| Ктп | 7 | 6,5 | 6 | 5,5 | 5 | 4,5 | 4 | 3,5 | 3 | 5 |
| Ттп, c | 0,01 | 0,02 | 0,03 | 0,04 | 0,05 | 0,04 | 0,03 | 0,06 | 0,02 | 0,03 |
| Настройка наблюдателя | Би | Ба | Би | Ба | Би | Ба | Би | Ба | Би | Ба |
МОДАЛЬНОЕ УПРАВЛЕНИЕ
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!