Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ПРИВОДА
Цель предварительного расчета заключается в составлении и уточнении кинематической схемы установки, выборе основных элементов привода и проведении его кинематического и силового анализа. Этот этап заканчивается составлением таблицы исходных данных, необходимой для дальнейшего расчета отдельных узлов и деталей привода.
1. Составление кинематической схемы
Каждый студент получает от руководителя шифр задания на курсовой проект, построенный по следующей схеме:

Например: задан шифр: КП. 2069889. 15. Д 1. 3 4 15
 |
|
|
|
Д1

| ||||||||||||||
 Д2
Открытая зубчатая
Д2
Открытая зубчатая
  передача
Исполнит. мех-м передача
Исполнит. мех-м
 Редуктор
Редуктор
|
Д3
Передача плоским
| |||||||||||||
  Д4
Исполнит. мех-м
Передача цепная
Редуктор
Д4
Исполнит. мех-м
Передача цепная
Редуктор
|  Д5
Д5

| |||||||||||||
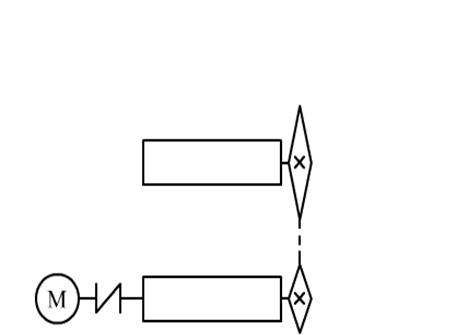
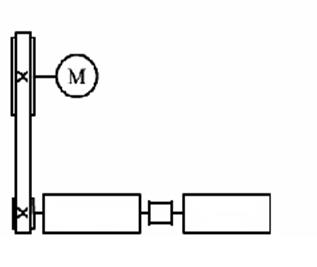
Рис.1. Варианты принципиальных схем привода
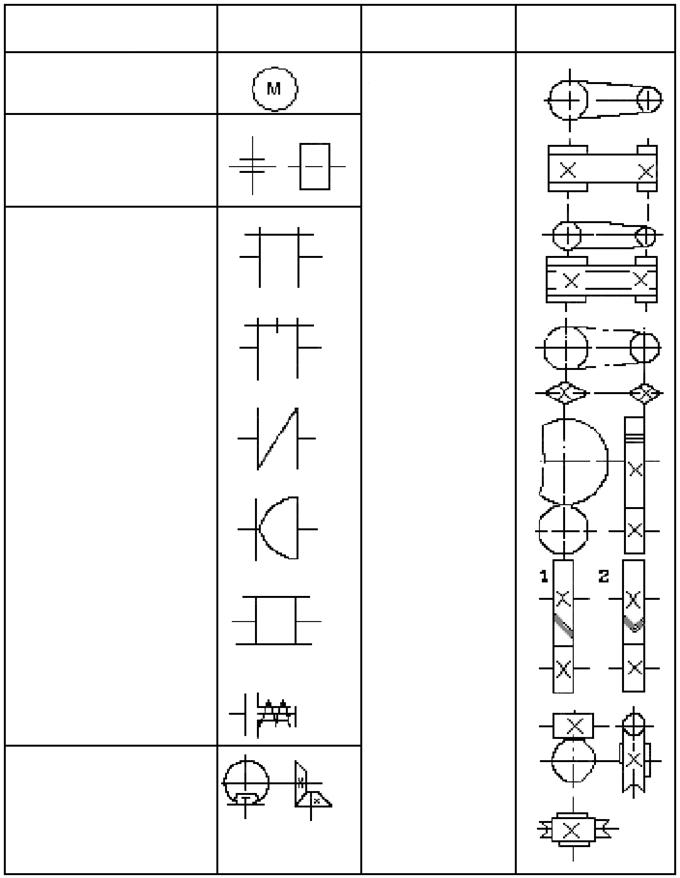
Таблица 1
Условные обозначения элементов кинематических схем
|
|
|
| ||||||||
|
| ||||||||||
| |||||||||||
| |||||||||||
| |||||||||||
| 1 | 
| 2 | 
|
| 3 | 
| 4 | 
|
| 5 | 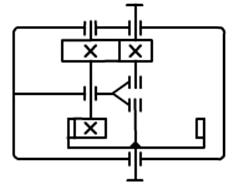
| 6 | 
|
| 7 | 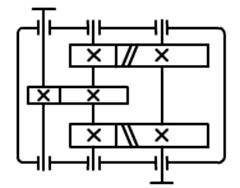
| 8 | 
|
| 9 | 
| 10 | 
|
Рис. 2. Варианты кинематических схем редукторов (начало)

Рис. 2. Варианты кинематических схем редукторов (окончание)
Срок службы – 5 лет Кгод = 0,5; Ксут = 0,33 |
Срок службы – 5 лет Кгод = 0,6; Ксут = 0,5 | ||
Срок службы – 5 лет Кгод = 0,7; Ксут = 0,75 |
Срок службы – 5 лет Кгод = 0,8; Ксут = 0,6 |
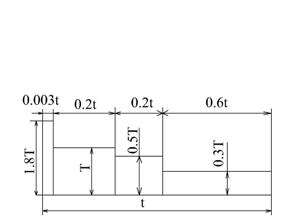
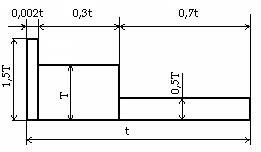
Рис. 3. Варианты исполнительных механизмов конвейера и графики нагрузки
 |
10
 |
Задание на курсовой проект по деталям машин
Шифр КП.15.Д2.21.06
Студенту Ивановой И.Г. факультет ВМТ гр. ВМТ-411

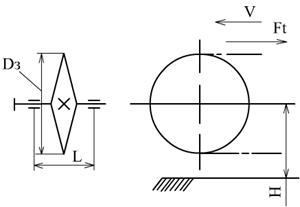
Спроектировать привод ленточного конвейера
Кинематическая схема График нагрузки
 |
Исходные данные
1. Окружное усилие на барабане – Ft, кН 1,8
|
|
2. Скорость ленты конвейера – V, м/с 0,6
3. Диаметр барабана – Dб, мм 250
4. Ширина ленты – В, мм 400
5. Высота установки ведущего вала – H, мм 350
6. Угол обхвата барабана – α, рад 3,5
Разработать
1. Сборочный чертеж ведущего вала (срок исполнения 15.03.99)
2. Сборочный чертеж редуктора (срок исполнения 20.04.99)
3. Сборочный чертеж привода (срок исполнения 03.05.99)
4. Рабочие чертежи деталей (срок исполнения 10.05.99)
Проект предоставить к защите 13.05.99
Задание получил 12.02.99 разработчик И.Г. Иванова
(подпись)
Руководитель разработки И.Н. Попов
ст. преподаватель (подпись)

Задание на курсовой проект по деталям машин
Шифр КП.15.Д2.21.06
Студенту Иванову В.П. факультет ВТ гр. ВТ-411
Спроектировать привод цепного конвейера

Кинематическая схема График нагрузки

Исходные данные
1. Окружное усилие на звездочке – Ft, кН 1,4
2. Скорость цепи конвейера – V, м/с 1,0
3. Шаг цепи по ГОСТ 588-81 – P, мм 63
4. Число зубьев ведущей звездочки – Z 9
5. Высота установки ведущего вала – H, мм 300
6. Установочный размер ИМ – L, мм 350
Разработать
1. Сборочный чертеж редуктора (срок исполнения 30.03.99)
2. Сборочный чертеж ведущего вала (срок исполнения 20.04.99)
3. Сборочный чертеж привода (срок исполнения 03.05.99)
4. Рабочие чертежи деталей (срок исполнения 10.05.99)
Проект предоставить к защите 15.05.99
Задание получил 12.02.99 разработчик В.П. Иванов
(подпись)
Руководитель разработки И.Н. Попов
|
|
ст. преподаватель (подпись)
Например:
КП.15.Д1.34. КП.15.Д3.12.


Составляя кинематические схемы, нужно помнить, что при передаче тягового усилия Ft зацеплением с помощью тяговых цепей (цепные конвейеры) в приводе необходимо предусмотреть предохранительное устройство в виде предохранительной муфты предельного момента. Например, соединение приводной звездочки со ступицей можно выполнить через срезной штифт.
Кинематическая схема и график нагрузки после согласования с руководителем проектирования вычерчивается на бланке задания. Здесь же приводятся исходные данные, которые в соответствии с заданным вариантом выписываются из табл. 2 или табл. 3. В этих таблицах в графе "шифр" указаны рекомендуемые для каждого варианта сочетания номеров общей схемы привода и схем редукторов (на бланк задания не заносится).
Выше показаны примеры оформления бланков заданий. Кинематическая схема привода в произвольном масштабе вычерчивается также на чертеже общего вида.
Исполнительного механизма
На этапе предварительного расчета определяются недостающие размеры (не указанные в исходных данных), необходимые для выполнения чертежа вала ИМ.
Если в качестве ИМ задан вал приводного барабана ленточного конвейера, то дополнительно определяется длина барабана в миллиметрах:
Вб = В + (50... 100), (1)
где В – ширина ленты транспортера, мм (задана в исходных данных).
Если ИМ – вал цепного конвейера, то на данном этапе ограничиваются расчётом диаметра делительной окружности приводной звёздочки:
 (2)
(2)
где DЗ – диаметр делительной окружности, мм; Р – шаг тяговой цепи, мм; Z – число зубьев звёздочки.
По ступеням передач
Общее передаточное отношение привода определяется по формуле
|
|

(13)
С другой стороны, (см. выше) оно может быть получено перемножением передаточных отношений отдельных ступеней передач, то есть
 , (14)
, (14)
где Ui – передаточное отношение отдельной i-й ступени передач,
n – число ступеней передач по кинематической схеме.
Равенство (14) обеспечивается путем подбора Ui с использованием рекомендаций табл. 5.
Если по кинематической схеме передач редуктора имеется открытая передача (зубчатая, цепная или ременная), то, принимая по табл. 5 передаточное отношение открытой передачи, находят передаточное отношение редуктора:

(15)
где Uоп – передаточное отношение отрытой передачи.
Если открытой передачи в приводе нет (схема 1, рис. 1), то  .
.
Примем обозначения передаточных отношений: Uоз – открытая зубчатая передача; Uц – цепная передача; Uрм – ременная передача.
После определения общего передаточного отношения редуктора производится его разбивка по отдельным ступеням передач. В случае стандартного редуктора разбивка по ступеням не производится, а  .
.
Передаточные отношения одноступенчатых цилиндрических и конических редукторов, проектируемых для серийного производства, выбираются из рядов:
| 1-й ряд | 2,0 | 2,5 | 3,15 | 4,0 | 5,0 | 6,3 | 8 | 10 | 12,5 |
| 2-й ряд | 2,24 | 2,8 | 3,55 | 4,5 | 5,6 | 7,1 | 9 | 11,2 | - |
Предпочтительнее 1-й ряд. Для одноступенчатых редукторов (за исключением червячных и волновых) не рекомендуется брать более:
Umax = 6,3 - для конических передач;
Umax = 8 - для цилиндрических передач;
Umax = 12,5 - для планетарных передач.
При больших значениях Up принимают число ступеней передач больше единицы или, если это возможно, применяют более тихоходный двигатель.
Передаточное отношение тихоходной – Uт и быстроходной – Uб ступеней двух- ступенчатых редукторов можно определить по рекомендациям П.Ф. Дунаева [2].

Для редуктора по схеме 3; 6; 7 (рис. 2) (16)

Для редуктора по схеме 4 (17)
|
|

Для редуктора по схеме 5 (18)
 |
Для редуктора по схеме 8 (19)
Для всех схем
 ,
,  (20)
(20)
Точность разбивки общего передаточного отношения проверяется следующим условием:

(21)
Если условие (21) выполняется, то переходят к составлению таблицы исходных данных.
Для схем планетарных и волновых редукторов передаточные отношения выбираются по рекомендациям специальной литературы [1, 3, 5 и др.].
ПРИМЕР
В предыдущем примере nим = 38,2 об/мин;
nтаб = 2840 об/мин, nтаб = 1435 об/мин.
Определяем общее передаточное отношение привода для двух вариантов электро-двигателей по зависимости (13):



Определяем общее передаточное число редуктора.
Принимаем по табл. 5 передаточное отношение цепной передачи равным 2,5, тогда передаточное отношение редуктора


Делаем разбивку передаточного отношения редуктора по ступеням передач.
Так как редуктор выполнен по схеме 3, то разбивку производим с использованием рекомендаций, изложенных выше. Используя зависимости (16), (20), получим




Учитывая рекомендации по назначению передаточных отношений ступеней редуктора (табл. 5), из двух вариантов принимаем второй, так как для первого варианта Uб1 > Uрек. С учетом стандартного ряда передаточных отношений (см. выше) для принятого варианта разбивки назначаем



По зависимости (21) проверяем точность разбивки передаточных отношений:

что больше допустимой нормы.
Поэтому производим корректировку передаточных отношений, а именно принимаем Uц=2,6 вместо 2,5. Остальные значения передаточных отношений оставляем без изменения, тогда

Таким образом, условие (21) выполняется. Окончательно принимаем:
Uб = 4,5; Uт = 3,15; Uц = 2,6; электродвигатель 4А100 S4 УЗ исполнение M100. Pтаб = 3.0 кВт, nтаб = 1435 об/мин.
Проверку выбранного электродвигателя на перегрузку производим по условию (12)

где Тмах = 1,3Т (см. график нагрузки);
Т = 0,75; Тмах = 1,3·0,75 = 0,975 кНм;
nТАБ = 1435 об/мин; UО = 37,565;
 = 0,850; для выбранного электродвигателя ψn = 2,0,
= 0,850; для выбранного электродвигателя ψn = 2,0,
тогда  ,
,
а т. к. РТАБ = 3,0 кВт, то условие (12) выполняется, т. е. двигатель не будет перегружен.
Вычерчиваем эскиз выбранного электродвигателя с указанием его основных характеристик.

| b1 | L30 | h31 | d30 | h | d1 | d10 | L1 | L10 | L31 | b10 | h10 | h1 |
| 8 | 365 | 265 | 235 | 100 | 28 | 12 | 60 | 112 | 63 | 160 | 12 | 7 |
Мощность РТАБ = 3,0 кВт; частота вращения 1 435 об/мин; кратность пускового момента  = ТПУСК/Т = 2,0.
= ТПУСК/Т = 2,0.
ПРИМЕР
Для рассмотренного выше примера имеем
 .
.
Тогда таблица исходных данных будет выглядеть так:
| N валов | ni, об/мин | Pi, кВт | Ti, Н·м |
| 1 |

|

|

|
| 2 |

|
 
|

|
| 3 |

|

|

|
| 4 | 
|
|
|
ПРОВЕРКА
n4 = 38,936 об/мин; nим = 38,2 об/мин;
T4 = 735,658 Н·м; T = 750 Н·м.
Расхождения в скоростях и моментах 2 %, что допустимо (предел 5 %).
В случае использования в курсовом проекте стандартного редуктора таблица исходных данных будет содержать всего три строки, 2-я и 3-я строки будут объединены, т. к.  .
.
Таблица исходных данных позволяет начать проектирование с любого элемента кинематической схемы привода. Так, для рассматриваемого примера по данным первой строки (вал N 1) производится подбор упругой муфты и расчет гюрзой (быстроходной) ступени передач редуктора. По данным второй строки (ват N 2) рассчитывается вторая (тихоходная) ступень редуктора. По данным третьей строки (зал N 3) – цепная передача. По данным четвертой строки производится проектирование ИМ.
В отличие от рассмотренного примера (цилиндрический редуктор) червячная и волновая передачи рассчитываются по вращающему моменту не на ведущем, а на ведомом валу. При расчете этих передач исходные данные из таблицы берутся на строку ниже.
ПРИЛОЖЕНИЯ
Таблица 6
Двигатели закрытые обдуваемые единой серии АИР (тип/асинхронная частота вращения, об/мин)
| Мощ- ность Р, кВт | Синхронная частота, об/мин | |||||||
| 3000 | 
| 1500 | 
| 1000 | 
| 750 | 
| |
| 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5 11 15 18,5 22 30 | – – – 71А2/2840 71В2/2810 80А2/2850 80В2/2850 90L2/2840 100S2/2880 100L2/2880 112M2/2900 132M2/2900 160S2/2940 160M2/2940 180S2/2945 180M2/2945 | – – – 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 1,6 1,4 1,4 1,4 1,4 | – – 71А4/1390 71В1/1390 80А4/1420 80В4/1415 90L4/1425 100S4/1435 100L4/1430 112M4/1445 132S4/1455 132M4/1460 160S4/1465 160M4/1465 180S4/1470 180M4/1470 | – – 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 1,4 1,4 1,4 1,4 | – 71A6/910 71B6/900 80A6/915 80B6/920 90L6/935 100L6/950 112MA6/955 112MB6/950 132S6/965 132M6/970 160S6/975 160M6/975 180M6/975 – – | – 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,0 1,2 1,2 1,2 – – | 71B3/680 80A8/675 80B8/700 90LA8/700 90LB8/700 100L8/700 112MA8/700 112MB8/700 132S8/720 132M8/720 160S8/730 160M8/730 180M8/730 – – – | 1,7 1,7 1,7 1,7 1,7 1,7 2,2 2,2 2,2 2,2 2,2 2,2 2,0 – – – |
 Электродвигатели серии АИР (основные размеры, мм)
Электродвигатели серии АИР (основные размеры, мм)
| Исполнение | IM2081 и IM3081 | d25 | 130 | 180 | 230 | 250 | 300 | |||||||||||||
| d24 | 200 | 250 | 300 | 350 | 400 | |||||||||||||||
| d22 | 12 | 15 | 19 | |||||||||||||||||
| d20 | 165 | 215 | 265 | 300 | 350 | |||||||||||||||
| L21 | 10 | 12 | 14 | 16 | 18 | 15 | 18 | |||||||||||||
| L20 | 3,5 | 4 | 5 | |||||||||||||||||
| IM1081 и IM2081 | h31 | 201 | 218 | 243 | 263 | 310 | 350 | 430 | 470 | |||||||||||
| h10 | 9 | 10 | 11 | 12 | 13 | 18 | 20 | |||||||||||||
| h | 71 | 80 | 90 | 100 | 112 | 132 | 160 | 180 | ||||||||||||
| b10 | 112 | 125 | 140 | 160 | 190 | 216 | 254 | 279 | ||||||||||||
| d10 | 7 | 10 | 12 | 15 | ||||||||||||||||
| L31 | 45 | 50 | 56 | 63 | 70 | 89 | 108 | 121 | ||||||||||||
| L10 | 90 | 100 | 125 | 112 | 140 | 178 | 210 | 203 | 241 | |||||||||||
| IM1081, IM2081, IM3081 | h1 | 6 | 7 | 8 | 9 | 8 | 9 | 9 | 10 | 9 | 10 | |||||||||
| b1 | 6 | 8 | 10 | 12 | 14 | 12 | 14 | 14 | 16 | 14 | 16 | |||||||||
| d1 | 19 | 22 | 24 | 28 | 32 | 38 | 42 | 48 | 42 | 48 | 48 | 55 | 48 | 55 | ||||||
| L30 | 285 | 300 | 320 | 350 | 362 | 392 | 452 | 480 | 530 | 624 | 667 | 662 | 702 | |||||||
| L1 | 40 | 50 | 60 | 80 | 110 | |||||||||||||||
| IM1081 | d30 | 170 | 186 | 208 | 235 | 260 | 302 | 358 | 410 | |||||||||||
| Число полюсов | 2, 4, 6, 8 | 2 | 4, 6, 8 | 2 | 4, 6, 8 | 2 | 4, 6, 8 | 2 | 4, 6, 8 | |||||||||||
| Тип двигателя | 71A, B | 80A | 80B | 90L | 100S | 100L | 112M | 132S | 132M | 160S | 160M | 180S | 180M | |||||||
| Таблица 7 Двигатели. Основные размеры, мм |
ЦИЛИНДРИЧЕСКИЕ РЕДУКТОРЫ
ЦИЛИНДРИЧЕСКИЕ ОДНОСТУПЕНЧАТЫЕ РЕДУКТОРЫ
ТИПОРАЗМЕРОВ: ЦУ-100, ЦУ-160, ЦУ-200, ЦУ-250 (ПО ГОСТ 21426-75)
Основные параметры редукторов
| Типо-размер редук-тора | Меж-осевое рас-стоя-ние, мм | Номинальные передаточные числа | Номинальный крутящий момент на тихоходном валу, Н.м, не менее | Номинальная радиальная нагрузка на валу, не менее | Масса, кг, не более | ||
| 1-й ряд | 2-й ряд | быстро-ходном | тихо-ходном | ||||
| ЦУ-100 | 100 | 2,0; 2,5; 3,15; 4,0; 5,0; 6,3 | 2,24; 2,8; 3,55; 4,5; 5,6 | 250 | 50 | 200 | 27 |
| ЦУ-160 | 160 | 1000 | 100 | 400 | 75 | ||
| ЦУ-200 | 200 | 2000 | 200 | 560 | 135 | ||
| ЦУ-250 | 250 | 4000 | 300 | 800 | 250 | ||
1-й ряд значений u следует предпочитать 2-му.
Фактические значения передаточных отношений не должны отличаться от номинальных более чем на 2,5 % при u £ 4 и на 4 % при u > 4.
Пример обозначения цилиндрического одноступенчатого редуктора с межосевым расстоянием 200 мм, номинальным передаточным отношением 2,5, вариантом сборки 12, климатического исполнения У и категории размещения 2:
Редуктор ЦУ-200-2,5-12У2 ГОСТ 21426-75
Габаритные и присоединительные размеры редукторов, мм


Концы валов конические типа 1, исполнения 1 по ГОСТ 12081-72. На концах валов должны быть гайки по ГОСТ 5915-70, ГОСТ 5916-70, ГОСТ-10605-72 или ГОСТ 1060772 и стопорные шайбы – по ГОСТ 13465-77.
ЧЕРВЯЧНЫЕ РЕДУКТОРЫ
ЧЕРВЯЧНЫЕ ЦИЛИНДРИЧЕСКИЕ РЕДУКТОРЫ ОБЩЕГО
НАЗНАЧЕНИЯ РЧУ
Пример обозначения универсального червячного редуктора с межосевым расстоянием А=160 мм, передаточным отношением u=40, выполняемым по схеме сборки 4 с верхним червяком (исполнение 2 по расположению червячной пары), без лап (исполнение 1 по способу крепления):
РЧУ-160-40-4-2-1 ГОСТ 13563-68
То же, с нижним червяком и с лапами:
РЧУ-160-40-4-1-2 ГОСТ 13563-68
Габаритные и присоединительные размеры, мм

| Обоз-начение редукто-ров | А | А1 | А2 | А3 | А4 | В | В1 | В2 | B3 | B4 | d | d 1, (отклоне- ние по Н8) | d 2, не менее | H | H1 | Н2 |
| РЧУ-40 | 40 | 105 | 150 | 140 | 35 | 78 | 120 | 100 | 164 | 4 | 13 | 16 | 10,5 | 180 | 72 | 89,5 |
| РЧУ-50 | 50 | 125 | 160 | 145 | 35 | 86 | 125 | 105 | 180 | 4 | 13 | 16 | 10,5 | 200 | 72 | 99,5 |
| РЧУ-63 | 63 | 150 | 180 | 165 | 42 | 100 | 145 | 125 | 197 | 5 | 13 | 16 | 10,5 | 225 | 82 | 115 |
| РЧУ-80 | 80 | 180 | 225 | 185 | 50 | 117 | 164 | 140 | 212 | 5 | 15 | 18 | 12,5 | 267 | 92 | 132 |
| РЧУ-100 | 100 | 220 | 270 | 230 | 55 | 140 | 200 | 175 | 265 | 5 | 17 | 18 | 14 | 310 | 95 | 150 |
| РЧУ-125 | 125 | 280 | 350 | 280 | 75 | 190 | 230 | 200 | 325 | 7 | 22 | 25 | 18 | 385 | 125 | 190 |
| РЧУ 160 | 160 | 360 | 450 | 335 | 95 | 245 | 280 | 245 | 425 | 9 | 22 | 30 | 22 | 490 | 160 | 245 |
Размеры B 1 и Н3 – справочные.
| Обоз-начение редукто-ров | Н3, не более | L | L1 | L2 | h | h1 | h2 | Масса редукто- ра (без масла) с полым валом без лап, кг, не более | Масса лап, кг, не более | Масса тихоходного вала, кг, не более | |||
| Предельные отклонения по h16-H16 | не менее | с одним выход-ным концом | с двумя выход-ны- ми кон- цами | ||||||||||
| Корпус из алю-миниево- го сплава | Корпус из чугуна | ||||||||||||
| РЧУ-40 | 55 | 115 | 90 | 180 | 115 | 90 | 145 | 5,3 | 7,0 | 0,6 | 0,3 | 0,4 | |
| РЧУ-50 | 55 | 125 | 100 | 190 | 150 | 90 | 165 | 6,5 | 8,5 | 0,8 | 0,6 | 0,7 | |
| РЧУ-63 | 65 | 150 | 100 | 220 | 155 | 115 | 200 | 10,3 | 16,7 | 1,1 | 0,8 | 1,0 | |
| РЧУ-80 | 75 | 180 | 120 | 260 | 190 | 135 | 240 | 14,2 | 23,4 | 1,5 | 1,2 | 1,4 | |
| РЧУ-100 | 85 | 220 | 180 | 310 | 290 | 145 | 270 | 26,5 | 46,0 | 1,7 | 3,5 | 4,4 | |
| РЧУ-125 | 100 | 260 | 200 | 400 | 330 | 175 | 335 | 49,0 | 82,0 | 4,8 | 6,0 | 7,4 | |
| РЧУ 160 | 130 | 335 | 250 | 490 | 420 | 220 | 420 | 76,5 | 135 | 12,8 | 10,7 | 13,7 | |
Размеры h, h 1 и h 2 определяют наименьшее расстояние, необходимое для извлечения масломерной иглы
Концы быстроходных валов, мм
|
| Обозна- чение редук- торов | d | d 1 | d 2 | l | l 1 | b | t | h |
| РЧУ-40 | 16 | М10*1,25 | 26 | 40 | 30 | 5 | 4.3 | 5 | |
| РЧУ-50 | 16 | М10*1,25 | 26 | 40 | 30 | 5 | 4,3 | 5 | |
| РЧУ-63 | 22 | М12*1,25 | 32 | 50 | 38 | 6 | 6,6 | 6 | |
| РЧУ-80 | 25 | М16*1,5 | 40 | 60 | 45 | 8 | 7,5 | 7 | |
| РЧУ-100 | 32 | М20*1,5 | 45 | 80 | 60 | 10 | 10,1 | 8 | |
| РЧУ-125 | 36 | М20*1,5 | 45 | 80 | 60 | 10 | 12,1 | 8 | |
| РЧУ-160 | 40 | М24*2 | 50 | 110 | 85 | 12 | 13,8 | 8 |
Резьба метрическая – по ГОСТ 9150-59; поле допуска для болта 8g, для гайки 7Н – по ГОСТ 16093-70.
Размеры h h 1 и h 2 определяют наименьшее расстояние, необходимое для извлечения масломерной иглы.
Концы тихоходных валов, мм
|
| |||||||||
| Обозначение редукторов | Вал исполнений 2, 3, 4 по схеме сборки | Соединение | |||||||
| d (пред. откл. по m6) | d 3 | l | l 3, не менее | А | Шпоночное по ГОСТ 8788-68 и ГОСТ 10748-68 | Шлицевое по ГОСТ 6033-51 | |||
| b | h | d - t | Эв. D×m×z | ||||||
| РЧУ – 40 | 18 | М4 | 28 | 15 | - | 5 | 6 | 14,5 | 22 ×1,5×14 |
| РЧУ – 50 | 22 | М5 | 36 | 18 | - | 6 | 6 | 18,5 | 28×1,5×18 |
| РЧУ – 63 | 25 | М6 | 42 | 24 | - | 8 | 7 | 21,0 | 30×1,5×18 |
| РЧУ – 80 | 32 | М8×1 | 58 | 30 | - | 10 | 8 | 27,0 | 38×2×18 |
| РЧУ – 100 | 40 | М8×1 | 82 | 16 | 20 | <||||
|
|
|

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

 ремнем
ремнем