

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Подвесные дороги с жестким рельсом применяются для транспортирования насыпных или штучных грузов на складах, в цехах промышленных предприятий. Широкое применение подвесные дороги получили на металлургических и других заводах, и на предприятиях с поточно-массовым производством.
Трасса подвесных дорог бывает простой с маятниковым движением подвижного состава и более сложной – замкнутой (рис. 9.2.) с одновременным обслуживанием участков цеха (Ц), склада (Ск) и других пунктов (Д) транспортирования грузов.

Рис. 9.2. Трасса подвесных дорог
Достоинствами подвесных дорог являются:
- возможность обеспечения цеха (склада) легкими грузоподъемными устройствами;
- сравнительно небольшой вес подвижного состава и подвесных путей;
- возможность автоматизации процессов транспортирования и адресования грузов;
- возможность обслуживания сложных трасс в горизонтальной плоскости и осуществление бесперегрузочного транспорта между цехами и складами;
- уменьшение капитальных затрат и сокращение кубатуры зданий;
- высвобождение производственных площадей цехов, складов от транспортных средств.
К недостаткам подвесных дорог надо отнести сравнительно небольшую грузоподъемность подвижного состава (до 10 тс) и относительно высокую стоимость сооружения путей на открытых территориях.
Подвесная монорельсовая дорога состоит из следующих элементов: подвесного пути, механизма подъема, механизма передвижения, системы управления движениями механизмов и грузозахватного устройства.
Преимущественное применение получили однорельсовые пути (монорельсы) с ездой понизу. Эти пути могут иметь любую трассу благодаря применению в них кривых участков, стрелок и поворотных кругов, крестовин, которые дают возможность приспособить подвесную дорогу к любым производственным условиям.
|
|
Основным типом рельсов, применяемых для однорельсовых подвесных путей, являются двутавровые балки, в которых рабочей поверхностью для качения колес тележек являются нижние полки.
Для подвесных путей с подвижным составом грузоподъемностью до 2 тс применяют балки от № 18 до № 30, для более тяжелого подвижного состава грузоподъемностью 3–10 тс используют балки № 24–45.
Достоинством двутавровых балок является их большая общая жесткость и простота крепления к опорам.
К недостаткам балок надо отнести недостаточную местную жесткость, твердость и излишне большую ширину полок (80–120 мм вместо необходимой 50–60 мм), а также уклон 1: 6, который создает дополнительное сопротивление при качении ходовых колес тележек. Перечисленные недостатки ограничили скорость передвижения тележек до 60–90 м/мин.
В целях устранения указанных недостатков применяют пути из специальных двутавровых профилей, у которых рабочая поверхность полок горизонтальная, а ширина их уменьшена до 50–80 мм. Кроме этого применяют пути из тавров, уголков и головчатые рельсы.
Для монорельсовых подвесных дорог используются следующие подъемно-транспортные устройства:
1 Ручные подвесные тележки – кошки, представляющие собой конструктивную компоновку механизмов подъема и передвижения. Механизмы подъема – обыкновенные ручные или электрические тали, а также пневмоподъемники грузоподъемностью 0,25–5,0 тс, которые подвешиваются к серьге или крепятся планками к раме тележки. Передвижение тележек по путям с грузом и без него производится вручную со скоростью 50–60 м/мин.
|
|
2 Самоходные подвесные тележки – электрические тали (тельферы), в которых механизмы подъема и передвижения объединены в общую систему.
Отечественные заводы выпускают электрические тали основной серии ТВ и новой серии ТЭ грузоподъемностью от 0,15 до 7,5 тс. Электроталь серии ТЭ имеет механизм подъема, состоящий из электродвигателя, встроенного в барабан, редуктора, двух тормозов – стопорного и спускного, ограничителя подъема груза. В специальном исполнении эти тали имеют микроподъем, скорость которого в 3–4 раза меньше основной. Питание электродвигателя током производится через кольцевой токосъем.
Механизм передвижения тали состоит из электродвигателя, редуктора, двух приводных и двух холостых колес, смонтированных на раме тележки, передвигающейся по монорельсу. Подъемный механизм соединен с механизмом передвижения через траверсу и расположен параллельно или перпендикулярно направлению пути. Управление механизмами предусмотрено с пола при помощи кнопок пускателя. Питание током выполняется через кабель. Управление механизмами может быть осуществлено автоматическим путем, обеспечивающим работу электротали по заданной программе.
Электротали грузоподъемностью 0,15 и 0,25 тс не имеют механического передвижения, однако в случае необходимости они могут быть присоединены к тягачу.
Электрический тягач представляет собой тяговый механизм передвигающийся по двутавровым балкам или тавровому рельсу. Он состоит из электродвигателя, двухступенчатого редуктора, сдвоенных приводных и нажимных катков, охватывающих с боков нижнюю полку пути. Питание током осуществляется через присоединенную к нему электроталь. Управление тягачом производится с пола кнопкой. Тяговое усилие тягача (25 кг) обеспечивает транспортирование груза 0,5 т, скорость передвижения 20 м/мин., радиус закругления пути R > 0,5 м.
Технические сведения об электроталях ТЭ приведены в таблице 9.1.
Таблица 9.1 – Технические характеристики электроталей
|
|
| Марка электротали | Грузоподъемность, тс | Высота подъема, м | Скорость подъема, м/мин, | Скорость передвижения, м/мин | Длина, мм | Ширина, мм | Строительная высота, мм | Общий вес, кг | Радиус закругления, м | Кратность полиспаста |
| ТЭ-0,15 | 0,15 | 6 | 8 | - | - | - | - | - | - | 2 |
| ТЭ-0,25 | 0,25 | - | 620 | 156 | 460 | 54 | 0,8 | |||
| ТЭ-0,5 | 0,5 | 6, 12 и 18 | 20 | 663 | 275 | 630 | 96 | 0,5 | 2 | |
| ТЭ-1 | 1 | 20 | 693 | 320 | 835 | 195 | 1 | |||
| ТЭ-2 | 2 | 20 | 715 | 340 | 1030 | 275 | 1 | |||
| ТЭ-3 | 3 | 20 | 813 | 440 | 1260 | 435 | 2 | |||
| ТЭ-5 | 5 | 20 | 1230 | 500 | 1520 | 780 | 1,5 | |||
| ТЭ-7,5 | 7,5 | 12, 18 и 24 | 20 | - | - | - | - | - | 2 |
Электрические передвижные тали грузоподъемностью 2–7,5 тс, кроме управления с пола, могут иметь дополнительное управление из открытой или закрытой кабины. В этом случае скорость передвижения тали увеличивается до 60–100 м/мин.
3 Монорельсовые подвесные тележки выполняются из нормализованных узлов электрических талей с различными грузозахватными устройствами. Они предназначаются для транспортирования по подвесным путям угля, руды, песка, скрапа, жидкого чугуна и других грузов в цехах, складах промышленных предприятий. Конструкции монорельсовых тележек весьма различны.
Широкое применение получили тележки с двухканатным грейфером для угля, руды и других насыпных грузов. Они изготовляются грузоподъемностью 2 и 3 тс, скорость подъема 16–20 м/мин и скорость передвижения 75 м/мин. В качестве механизмов подъема и замыкания грейфера применены два стандартных механизма подъема электрических талей. Для транспортирования стружки и скрапа выпускаются тележки с электромагнитом; дли земли, песка и прочих сыпучих материалов – тележки с бадьей; для жидкого металла – тележки с ковшом. Кроме этого, изготовляются тележки с крюком. Скорость передвижения монорельсовых тележек от 50 до 150 м/мин.
Питание электроэнергией двигателей механизмов тележек осуществляется гибким кабелем, навиваемым на кабельный барабан. Длина кабеля допускается 15–40 м. Для подвесных путей большей протяженности, а также для путей со сложными трассами применяют контактное питание (троллей) электроэнергией механизмов тележки. Для механизмов тележки чаще применяют электродвигатели переменного тока и только в отдельных случаях используют пневматические двигатели.
|
|
В зависимости от грузоподъемности, передвижные тележки могут быть четырех- или восьмиколесными. Приводные колеса тележек располагаются с одной стороны подвесного рельса или с двух сторон (при большой протяженности путей и особенно с криволинейными участками). Управление тележками может быть ручным, дистанционным и автоматизированным.
Производительность ручных талей (кошек), самоходных электрических талей (тельферов) и монорельсовых подвесных тележек является одним из важных показателей их работы. Различают следующие виды производительности:
а) техническая производительность, показывающая число тонн или кубических метров груза, транспортируемого тележкой за один час непрерывной работы при полной ее загрузке;
б) эксплуатационная производительность, выражает плановую работу тележки (в тоннах или кубических метрах) за определенный период времени (смену, сутки, месяц, год);
в) фактическая производительность, показывающая фактическую работу тележки за смену, сутки, месяц и год.
Техническая производительность тележек определяется по формуле:
 , м3/ч,
, м3/ч,
где  – номинальная вместимость тележки, м3;
– номинальная вместимость тележки, м3;
 – число циклов в час;
– число циклов в час;
 ;
;
 – продолжительность одного цикла, с;
– продолжительность одного цикла, с;
 – число операций цикла (строповка и подъем груза, передвижение тележки с грузом и без груза и т.д.);
– число операций цикла (строповка и подъем груза, передвижение тележки с грузом и без груза и т.д.);
t – продолжительность одной операции цикла, сек.
Коэффициенты вычисляются из следующих формул:
 ;
;  ;
;
 ,
,
где Т – продолжительность работы механизма в цикле, с;
 – число часов работы в сутки;
– число часов работы в сутки;
 – число дней работы в году.
– число дней работы в году.
Полное сопротивление движению W электрических талей (тельферов) и монорельсовых тележек определяется как сумма сопротивлений от сил трения в осях ходовых колес и трения качения колес по рельсу, от перекосов тележек относительно оси пути, от проскальзывания колес по рельсу при конической форме ободов, от вписывания в кривые и от преодоления сил инерции при трогании с места.
Сопротивление движению W1 определяется по формуле
 ,
,
где  – сопротивление от сил трения в осях ходовых колес и трения качения колес тележек по прямому горизонтальному пути, отнесенное к ободу колеса;
– сопротивление от сил трения в осях ходовых колес и трения качения колес тележек по прямому горизонтальному пути, отнесенное к ободу колеса;
 , кгс,
, кгс,
где Q – вес транспортируемого груза, кгс;
G – полный вес тали (тележки) кгс;
 – средний диаметр колеса тележки, см;
– средний диаметр колеса тележки, см;
 – диаметр цапфы оси колеса, см;
– диаметр цапфы оси колеса, см;
 – коэффициент трения в подшипниках колес (для подшипников скольжения =0,07–0,12 для подшипников качения = 0,015–0,03);
– коэффициент трения в подшипниках колес (для подшипников скольжения =0,07–0,12 для подшипников качения = 0,015–0,03);
 – коэффициент трения качения, = 0,05–0,07см.
– коэффициент трения качения, = 0,05–0,07см.
При подъеме тележки (тали) по наклонному пути с углом  возникает дополнительное сопротивление:
возникает дополнительное сопротивление:
 .
.
В начальный период движения тележки возникает дополнительное сопротивление  , необходимое для преодоления сил инерции, определяемое по формуле:
, необходимое для преодоления сил инерции, определяемое по формуле:
|
|
 , кгс,
, кгс,
где  – скорость тележки при установившемся движении, м/сек;
– скорость тележки при установившемся движении, м/сек;
 – ускорение силы тяжести ( = 9,81 м/сек2);
– ускорение силы тяжести ( = 9,81 м/сек2);
 – время разгона тележки ( =1–1,5 с).
– время разгона тележки ( =1–1,5 с).
При работе тележек (талей) вне помещений учитывается сопротивление движению  необходимое для преодоления действия ветра
необходимое для преодоления действия ветра
 , кгс,
, кгс,
где  – удельное сопротивление ветра ( =25–40 кгс/м2);
– удельное сопротивление ветра ( =25–40 кгс/м2);
 и
и  – подветренная площадь груза и тележки (тали), м2.
– подветренная площадь груза и тележки (тали), м2.
Полное сопротивление движению тележки (тали)
 , кгс.
, кгс.
Потребная мощность двигателя
 , кВт,
, кВт,
где скорость тележки (тали) при установившемся движении, м/сек;
 – к. п. д. передаточного механизма передвижения ( =0,75–0,80).
– к. п. д. передаточного механизма передвижения ( =0,75–0,80).
Отсутствие буксования ведущих колес монорельсовых тележек и электрических талей обеспечивается, если силы сцепления  ведущих колес с рельсом больше полного сопротивления
ведущих колес с рельсом больше полного сопротивления  движению тележки, причем
движению тележки, причем
 ,
,
где N – суммарная нагрузка на ведущие колеса тележки (сцепной вес);
 – коэффициент сцепления колес с рельсом.
– коэффициент сцепления колес с рельсом.
Технические и эксплуатационные характеристики, технология работы должны обеспечивать высокую надежность функционирования подвесных монорельсовых дорог и безопасность работников, обслуживающих эти транспортные установки.
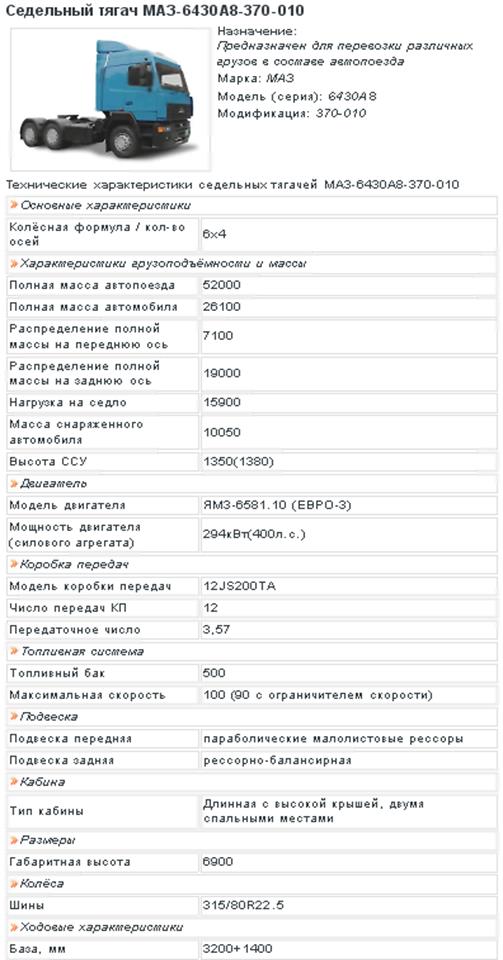
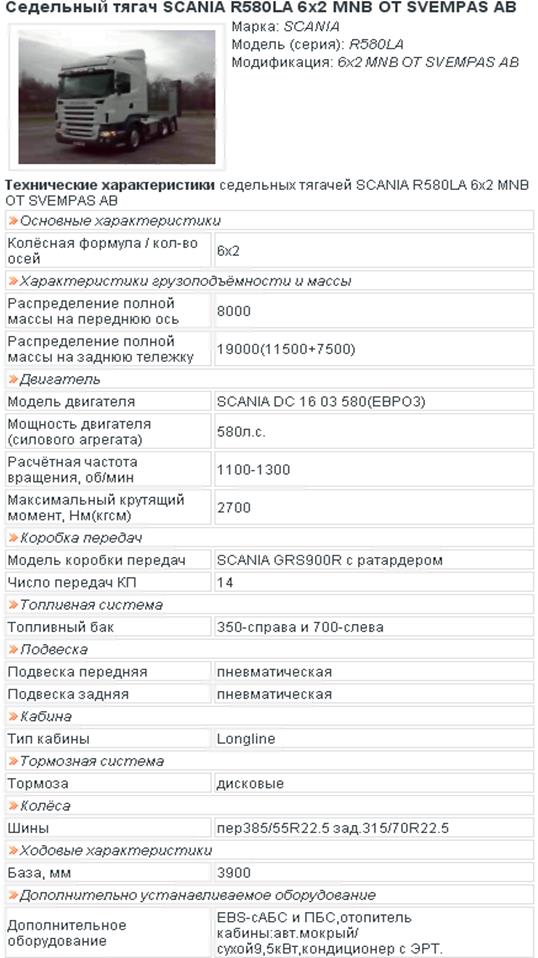
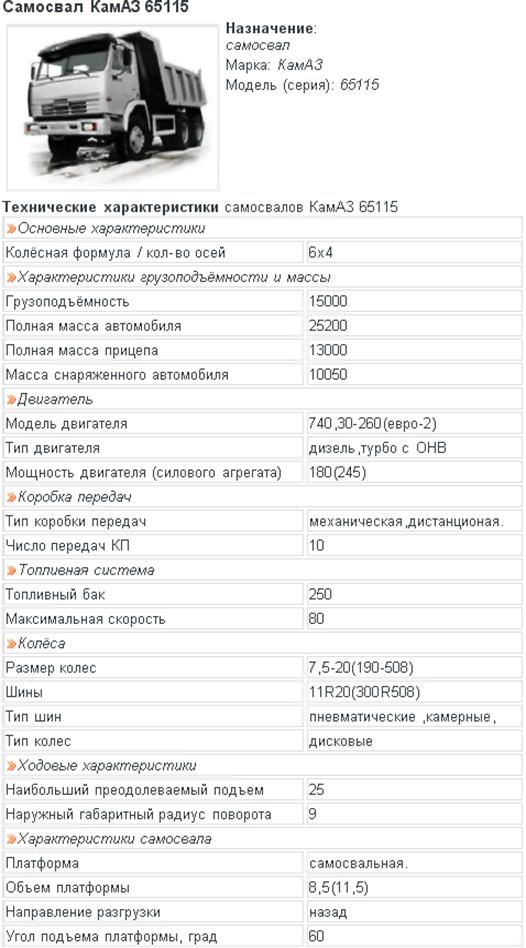
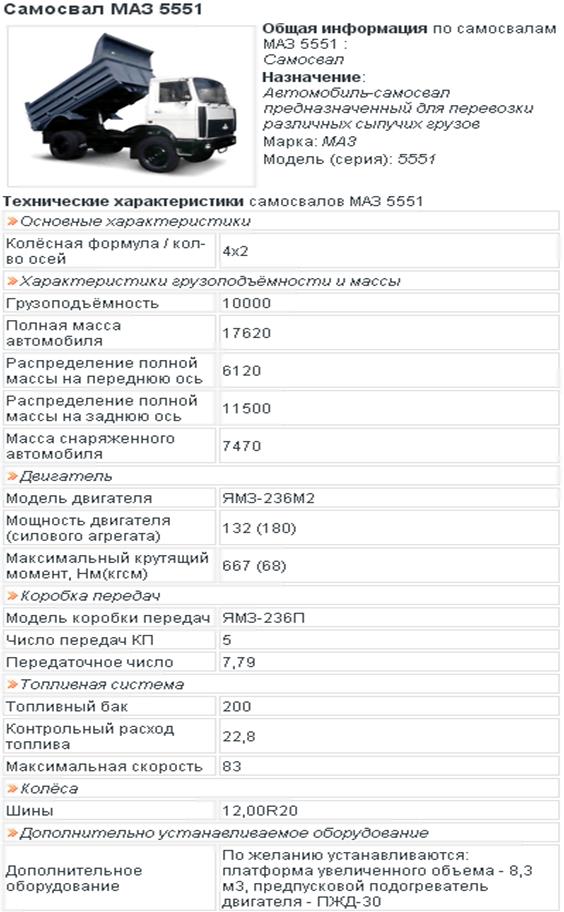
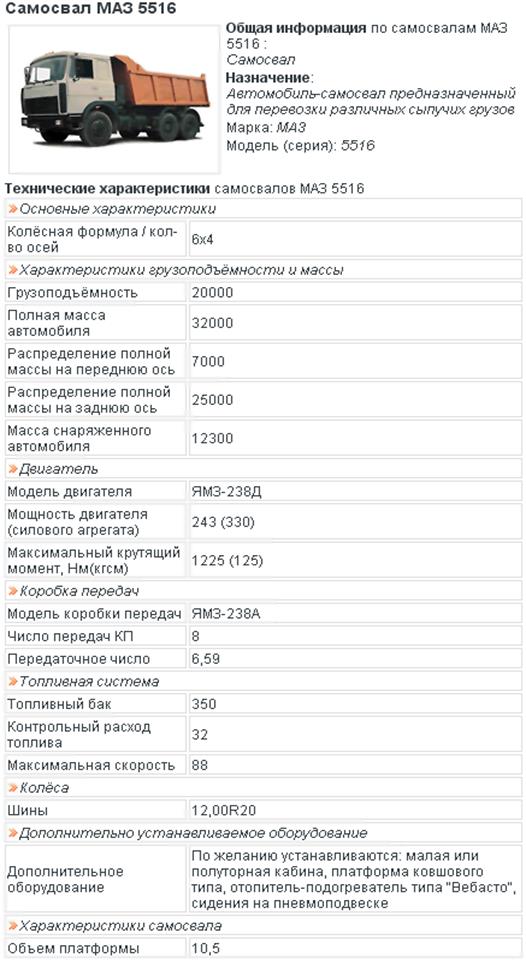
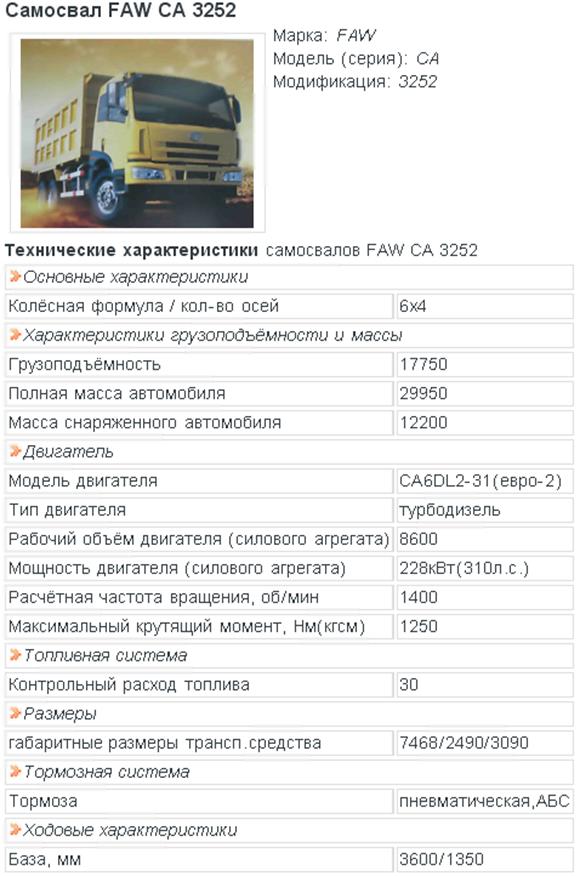
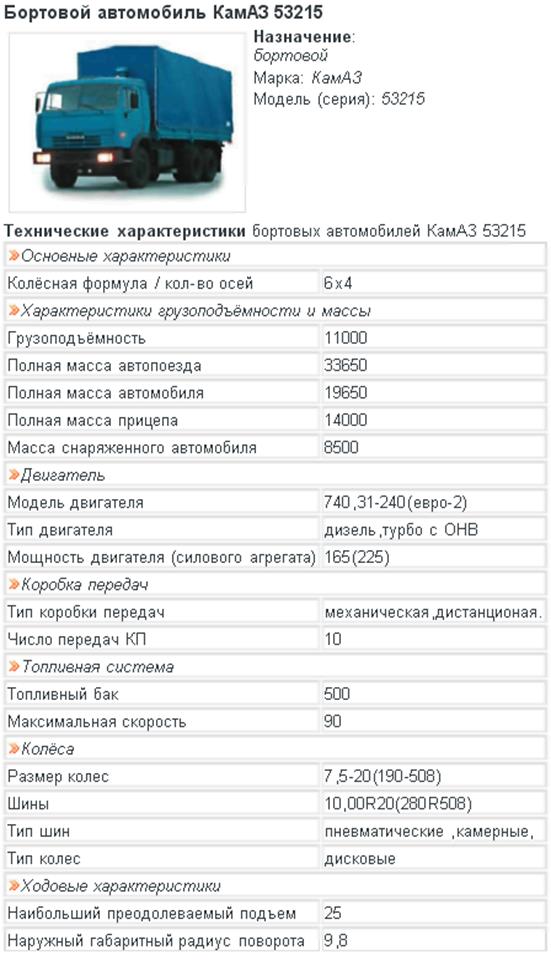
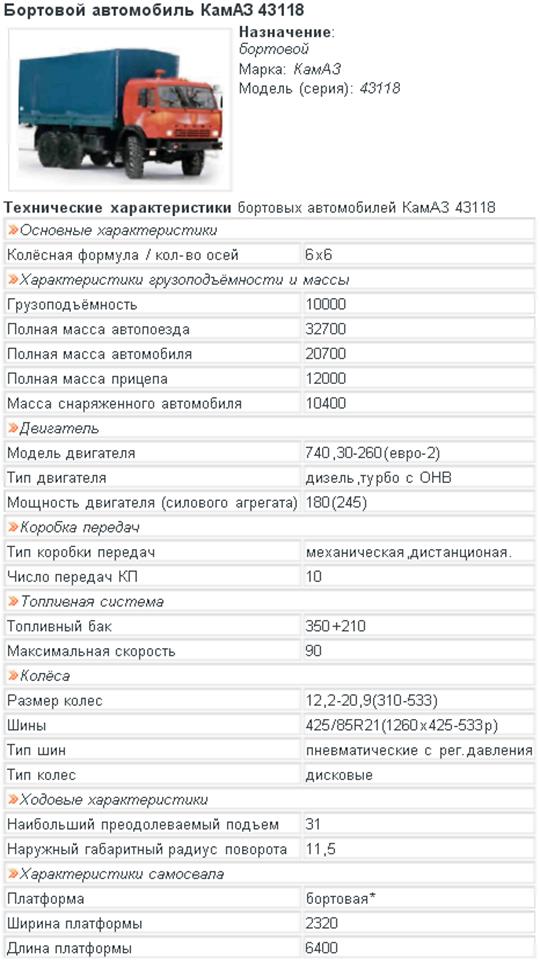
Приложение
Технико-эксплуатационные характеристики современных
автомобилей промышленного транспорта


















Библиографический список
1 Акулиничев, В.И. Организация перевозок на промышленном транспорте: учебник / В.И. Акулиничев. – М.: Транспорт, 1983.
2 Акулиничев, В.И. Железнодорожные станции и узлы промышленного транспорта. Учебник / В.И. Акулиничев, Л.П. Колодий, Н.Г. Мищенко. – М.: Транспорт, 1986.
3 Астафьев, В.М. и др. Автоматизация разработки единых технологических процессов: учеб. пособие / В.М. Астафьев. – Ростов-н/Д.
4 Березовский, М.В. и др. Основы организации перевозок на промышленных железных дорогах: учеб. пособие / М.В. Березовский. – Ленинград, 1983.
5 Бюллетень транспортной информации. Информационно-практический журнал № 3 (69). – 2001.
6 Бюллетень транспортной информации. Информационно-практичес-кий журнал № 4, 6 (70). – 2001.
7 Дудкин, Е.П. Специальные дороги промышленных предприятий: учеб. пособие / Е.П. Дудкин. – Санкт-Петербург, 1993.
8 Справочник проектирования промышленный транспорт II, Стройиздат, 1972.
9 Проектирование автомобильных дорог, часть I, Учебник министерства автомобильного транспорта и шоссейных дорог. – М., 1961.
10 Проектирование автомобильных дорог, часть II, Учебник министерства автомобильного транспорта и шоссейных дорог. – М., 1962.
11 Бенсон, Д. и др. Транспорт и доставка грузов: пер. с англ. / Д. Бенсон, Дж. Уайтехд. – М.: Транспорт, 1990.
12 Автомобильный справочник. Перевод с немецкого Р. Бюссиен. Под общей редакцией проф. А.А. Липгарта. – М.: Государственное издательство машиностроительной литературы, 1959.
13 Клейменов, В.М. Автомобиль. Учебник водителя / В.М. Клейменов, Н.М. Ильин, Ю.В.Бураев, – М: Транспорт, 1983.
14 Дробыденко, В.П. Трубопроводный транспорт твердых материалов. Серия «Транспорт» / В.П. Дробыденко, В.Н.Сысоев – М.: Знание, 1980.
15 Зеленков, В.И. Организация внутризаводских и межцеховых железнодорожных перевозок. Методические указания / В.И.Зеленков. – М, 1980.
16 Мищенко, Н.Г. Технология управления движением на полигонах и сети железных дорог: учеб. пособие / Н.Г.Мищенко, И.А. Солоп. – Ростов-н/Д, 2008.
17 Повороженко, В.В. Повышение производительности грузового вагона / В.В. Повороженко – М.: Транспорт, 1979. – с. 25-27.
18 Спиваковский, А.И. Транспортирующие машины. / А.И. Спиваковский. – М.: Машиностроение, 1968.
19 Правдин, Н.В. Взаимодействие различных видов транспорта в узлах. / Н.В. Правдин, В.Я. Негрей. – Минск: Высшая школа, 1983. – 16 с.
20 Ферапонтов, Г.В. и др. Эксплуатация железнодорожных подъездных путей / Г.В. Ферапонтов. – М: Транспорт, 1972, 201.
21 Шафрин, Б.И. Единая транспортная сеть и взаимодействие различных видов транспорта: учебник / Б.И. Шафрин. – М.: Транспорт, 1977. – 57 с.
22 Дудин, Е.П. Расчет основных параметров грузовых подвесных канатных дорог: методические указания / Е.П. Дудин. – Санкт-Петербург, 1992. – 67 с.
23 Проблемы промышленного и городского транспорта. Сборник научных трудов, Санкт-Петербург, 2009.
24 Промышленный транспорт, Журнал, 2008–2009.
25 Гундорова, Е.П. Технические средства железных дорог: учебник / Е.П. Гундорова. – М.: Маршрут, 2003. – 496 с.
Учебное издание
Мищенко Николай Григорьевич
Бакалов Максим Владимирович
Промышленный транспорт
Учебное пособие
Редактор Т.М. Чеснокова
Корректор Т.М. Чеснокова
Подписано к печати 09,03,2010 Формат 60х84/16.
Бумага газетная. Ризография. Усл. печ. л. 13,25.
Уч.-изд. л. 11,3. Тираж 300 экз. Изд. № 9. Заказ №
Ростовский государственный университет путей сообщения.
Ризография РГУПС.

Адрес университета: 344038, г. Ростов н/Д, пл. Ростовского
Стрелкового Полка Народного Ополчения, 2.
|
|
|

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!