Винтовые конвейеры (рис. 7.6) применяют при транспортировании в горизонтальном и наклонном направлениях (под углом до 20°) сухих сыпучих материалов (цемента, извести, песка, минеральных удобрений и др.). Рабочим органом у них служит винт (шнек), сплошной, ленточный или лопастный, установленный в металлическом желобе. Сверху желоб накрыт крышкой, к которой прикреплены подшипники, служащие опорами для вала шнека. Загрузочные и разгрузочные патрубки могут быть расположены в любом месте конвейера. При сообщении вращательного движения винту его лопасти перемещают насыпанный в желобе груз.
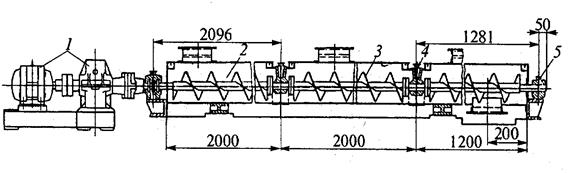
Рис. 7.6. Винтовой конвейер:
1 – приводная станция; 2 – желоб; 3 – винт (шнек); 4 – подвесной подшипник; 5 – концевой подшипник.
Инерционные и вибрационные конвейеры применяются для перемещения сильно пылящих, абразивных грузов, металлической стружки, мелкого литья и других грузов.
Инерционный качающийся конвейер (рис. 7.7) состоит из стального желоба 1, совершающего колебательные движения на упругих стойках 2 под действием кривошипного механизма 3, приводимого в движение от электродвигателя.
Груз перемещается под действием сил инерции, появляющихся в результате колебательных движений желоба.
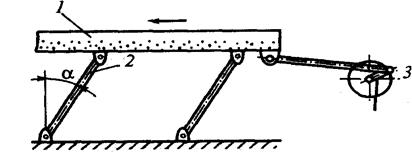
Рис. 7.7. Схема инерционного конвейера
Вибрационные конвейеры бывают однотрубные (рис. 7.8) и двухтрубные. Транспортирующая труба 1 соединена с опорой рессорными подвесками 2 и приводится в колебательное движение приводом 3. Для удобства изготовления, перевозки и монтажа вибрационный конвейер обычно расчленяют на отдельные секции длиной до 4 м. Трубы могут быть изготовлены из листового проката вальцеванием и сваркой. Подвеска их состоит из рессор, узлов крепления, коромысла, резиновых втулок, осей подвижных опор. Рессоры и резиновые втулки уравновешивают инерционные силы, возникающие при работе виброконвейера. Вибрационные конвейеры имеют существенные преимущества перед скребковыми и винтовыми. Прежде всего, они полностью герметизированы, что в значительной мере улучшает условия труда, а кроме того, просты по конструкции, надежны и безопасны в эксплуатации. Производительность их при транспортировании, например, песка, достигает 70 м3/ч. Амплитуда колебаний транспортирующих труб – 3 мм, частота – 850 в мин, угол вибрации 30°. Мощность электродвигателя для одной секции от 0,2 до 1,0 кВт. Внутренний диаметр труб от 162 до 416 мм.
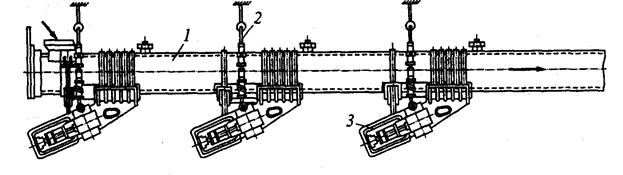
Рис. 7.8. Вибрационный конвейер
Техническая производительность винтовых конвейеров (т/ч)
 ,
,
где  – диаметр винта, м;
– диаметр винта, м;
 – шаг винта, м;
– шаг винта, м;
 – частота вращения, об./мин.;
– частота вращения, об./мин.;
 – коэффициент заполнения желоба ( принимают для тяжелых абразивных грузов 0,125–0,25, легких малоабразивных 0,32 и для легких неабразивных 0,4);
– коэффициент заполнения желоба ( принимают для тяжелых абразивных грузов 0,125–0,25, легких малоабразивных 0,32 и для легких неабразивных 0,4);
 – плотность груза, т/м3.
– плотность груза, т/м3.
Техническая производительность инерционных и вибрационных конвейеров (т/ч):
 ,
,
где  – ширина рабочей поверхности конвейера, м;
– ширина рабочей поверхности конвейера, м;
 – высота слоя груза, м (50–100 мм);
– высота слоя груза, м (50–100 мм);
– коэффициент заполнения желоба ( = 0,5–0,6);
 – скорость движения конвейера, м/с;
– скорость движения конвейера, м/с;
– плотность груза, т/м3.
Элеваторы
Элеваторами называют машины непрерывного действия, предназначенные для вертикального или близкого к нему наклонного перемещения штучных, кусковых или сыпучих грузов. По типу тягового органа они разделяются на ленточные и цепные.
В зависимости от вида захватных приспособлений элеваторы бывают ковшовые (нории) для сыпучих грузов, люлечные или с жесткими захватами для штучных грузов.
Промышленность выпускает ленточные элеваторы ЭЛ (рис. 7.9) с глубокими ковшами для транспортирования сухих легкосыпучих материалов, с мелкими ковшами для влажных и слежавшихся материалов (модификации ЭЛГ и ЭЛМ), а также ковшовые элеваторы одно-цепные (ЭЦГ, ЭЦМ, ЭЦО) и двух-цепные (Э2ЦО). На тихоходных цепных элеваторах устанавливают ковши с направляющими бортами на тыльной стороне, что облегчает их разгрузку. Они бывают с остроугольным (О – индекс в обозначении конвейеров) для сухих зерновых и мелкокусковых материалов, скругленным и плоским днищем. Ковши располагают на тяговом элементе без интервалов.
В элеваторах тяговые элементы с ковшами заключены в металлический кожух, который изолирует рабочий орган от внешней среды и препятствует просыпанию материала и запылению. В верхней части элеватора (головке), снабженной разгрузочным наклонным носком, расположена приводная станция, в нижней части (башмаке) – натяжная станция и загрузочный носок. Предотвращают раскачивание тягового органа направляющие щиты (дефлекторы), установленные внутри кожуха элеватора.
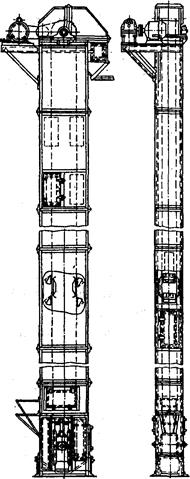
Рис. 7.9. Элеватор ленточный ковшовый
Производительность ковшовых элеваторов до 600 м3/ч, высота подъема до 60 м. Конструкции элеваторов для штучных грузов аналогичны ковшовым, только вместо ковшей к цепям прикреплены захваты, соответствующие роду и форме груза.
Для цилиндрических грузов (бочек, рулонов) захваты выполнены в виде крючьев (рис. 7.10, а), для ящичных и мешковых – в виде полок (рис. 7.10, б) или люлек (рис. 7.10, в). Элеваторы такого типа часто самозахватывающие и самосбрасывающие груз. Скорость движения цепей элеваторов для штучных грузов не превышает 0,5 м/с, а расстояние между захватами 1,5–1,8 м.
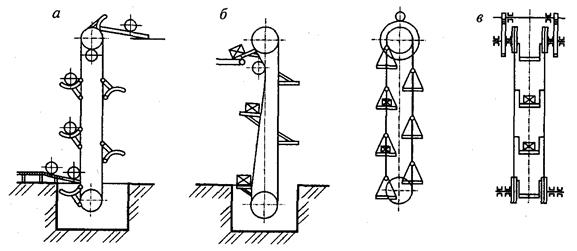
Рис. 7.10. Элеватор для штучных грузов
К элеваторам для штучных грузов относятся также бревнопогрузчики и штабелеры для досок. Элеватор-бревнопогрузчик ЭЖД-3 (рис. 7.11) представляет собой самоходную платформу на железнодорожном ходу (колея 1520 мм). На ней смонтированы цепные элеваторы с захватами-крючьями. Со склада к элеватору бревна подтаскивают лебедкой, установленной на платформе погрузчика, которые подхватываются крючьями приемного элеватора, движущимися со скоростью 0,25 м/с, и передаются на подъемный элеватор. Скорость движения захватов подъемного элеватора – 0,36 м/с. Это позволяет, не снимая бревен с приемной части, поднимать их вверх. У верхних звездочек бревно по наклонной плоскости скатывается в формируемый пакет (штабель). Производительность элеватора ЭЖД-3 – 50 м3/ч.
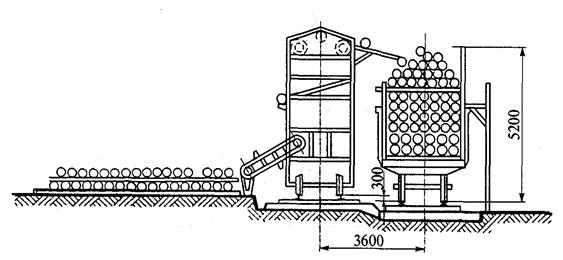
Рис. 7.11. Элеватор ЭЖД-3
Специальный подвижной элеватор-штабелер для досок (рис. 7.12). Вертикальная рама 2 его высотой 9,2 м укреплена на низкой самоходной тележке 1. В верхней и нижней части рамы находятся две пары звездочек 6, которые огибаются тяговыми цепями 3. К ним прикреплены двусторонние (симметричные) захваты 4 с шагом 1,4 м. Приведенные в движение, они поднимают доски к верхней паре звездочек. С верхним ведущим валом соединены два шарнирных параллелограмма 5 с полками, которые снимают доску с захвата и переносят ее на противоположную сторону элеватора, укладывая на тот же захват, обогнувший к этому времени ведущие звездочки. Опускаемая доска встречает на своем пути спуски 7, по которым направляется в штабель. Приводом штабелера служит электродвигатель мощностью около 7 кВт. Скорость движения цепей составляет 18–20 м/мин, скорость передвижения штабелера – 20–30 м/мин, производительность – 12 м3/ч.
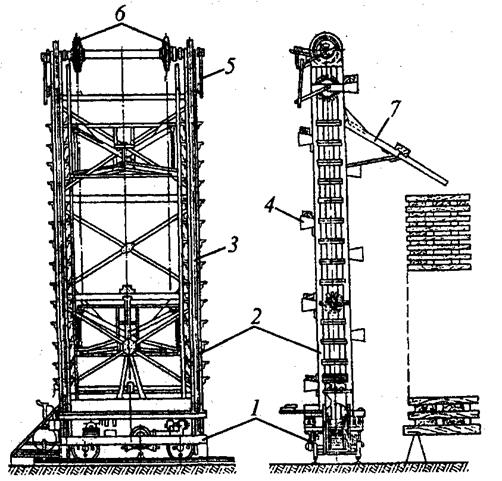
Рис. 7.12. Элеватор-штабелер для досок
Определение производительности элеватора. Техническая производительность ковшовых элеваторов (т/ч)
 ,
,
где  – вместимость ковша, л;
– вместимость ковша, л;
 – расстояние между ковшами (шаг), м;
– расстояние между ковшами (шаг), м;
– скорость тягового элемента, м/с;
– коэффициент заполнения ковша, принимаемый для порошкообразных грузов и продуктов размола 0,8–1,0; для зерновых 0,75–0,9; кусковых грузов средних размеров 0,6-0,7; тяжелых крупнокусковых грузов 0,5–0,6 (0,6–0,85);
– плотность груза, т/м3.





