ЛПДК представляет собой последовательность таблиц, строки которых соответствуют параметрам рi, а пары столбцов внутри таблицы – соответственно состоянию системы S(t) и векторной логической переменной X(t) в моменты t=0,1,…,m. В клетки левого столбца вписываются значения параметров в точечном или интервальном формате: для точечного параметра вписывается число, для интервального – пара чисел, заключенная в квадратные скобки. Число слева в квадратных скобках соответствует балльной оценке нижней границы интервала, число справа – балльной оценке его верхней границы. Параметру рi(t) ставится в соответствие логическая переменная хi(t), называемая индикатором, которая определяется следующим образом.
Для параметра точечного формата рi(t)=c: хi(t)=1, если pi=c; и xi(t)=0, если рi≠с (с – точечное значение параметра).
Для параметра интервального формата [a,b]: xi(t)=1, если (pi≥a)&(pi≤b)=1; и xi(t)=0, если (pi<a)v(pi>b)=1 (а,б – соответственно нижняя и верхняя границы допустимого интервала параметра).
Введем логическую функцию Фi(xj(t)), где i=0,1,…,m – индексы моментов, выделенных на временной шкале, j=1,…,n – индексы индикаторов параметров системы. Функция Ф составляется из индикаторов xi, например, с помощью операций конъюнкции (И), дизъюнкции (ИЛИ), инверсии (НЕ), назначение функции Ф - разрешение перехода от состояния S(t) к следующему состоянию S(t+1), t<m, только при значении Ф(t)=1. Пример построения ЛПДК проиллюстрирован ниже. Состояния системы изображаются прямоугольными таблицами с двумя столбцами, где в левом столбце указаны значения параметров для момента t, а в правом логические индикаторы, равные 1 или 0. Связки, соединяющие соседние состояния t,t+1, изображаются стрелками, ведущими из строчек таблицы предыдущего состояния в соответствующие строчки последующего состояния. Стрелки (связки) помечаются числами, выражающими приращение (положительное, отрицательное или нулевое) значения параметров. При этом в линейной проекции дорожной карты допускаются только стрелки, связывающие параметры одинакового формата. Для интервальных параметров, как в строчках таблиц дорожной карты, так и на стрелках между таблицами, левое и правое число соответствуют границам интервала. При переходе t,t+1 значение параметров точечного формата р в строчке таблицы для момента t и на стрелке, ведущей в одноименную строчку таблицы для момента t+1, суммируются, а полученное число вносится по стрелке в строчку р таблицы для момента t+1. Для перехода интервального формата аналогично суммируются и вносятся в таблицу t+1 значения верхних и значения нижних границ соответственно параметра и стрелки. Переход к таблице t+1 разрешается только при выполнении логического условия V(t) = 1.
Проиллюстрируем построение ЛПДК на гипотетическом примере (рис. 3.1). Начинаем с начального состояния t=0, где параметры р1, р2, р3 имеют точечный формат, а р4, р5, р6 – интервальный формат. Логическая функция, разрешающая переход от t=0 к t=1 имеет значение V(t=0)=(х1=1)&(x2=0)&(x3=0)&(x4=1)&(x5=0)&(x6=0)=1. Для создаваемой системы заданы, например, следующие ограничения: для всех состояний р1=0, и начиная с состояния t=1, р2=0, р3=0 (ноль играет роль константы «с» для параметров р1, р2, р3 точечного формата); ни для одного параметра интервального формата не допускаются отрицательные значения одной или обеих его границ. В качестве допустимого стандартного значения параметров интервального формата для всех четырёх таблиц примем пару чисел [0,+3].
Рассмотрим процесс построения ЛПДК, начиная с таблицы t=0. Согласно требованиям к создаваемой системе параметры р1 ,р2, р3 на протяжении всего процесса должны иметь нулевое значение. Однако точечные значения р2(t=0)=+1, р3(t=0)= -1. Для того, чтобы преобразовать их в момент t=1 в нули, надо вторую сверху стрелку, ведущую из таблицы t=0 в таблицу t=1, пометить числом -1, а третью сверху стрелку – числом +1. Тогда в обоих случаях сумма будет нулевой. Остальные стрелки трех линий для параметров точечного формата помечаются нулями. Параметры р4(t=0)=[0,+2], p5(t=0)=[0,-2], p6(t=0)=[-2,+2] относятся к интервальному формату, р4 с учетом пометки стрелки укладывается в принятую норму [0,+3]. Параметры р5, р6 имеют недопустимое значение, и при разметке стрелок согласно рис. 3.1 сохраняют недопустимое значение и в следующем состоянии (такте). Чтобы вывести параметры в допустимую зону, следует изменить пометку стрелок ЛПДК.
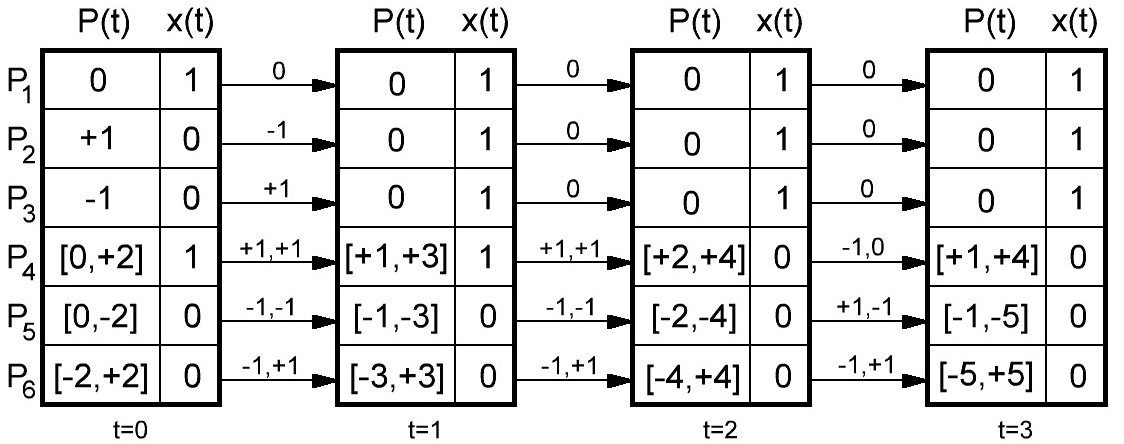
Рис. 3.1. Пример линейной проекции дорожной карты
При построении ЛПДК используется своеобразное управление, выражающееся через пометку стрелок числовыми данными, формируемыми экспертом. Результатом являются два целевых вектора, влияющие на предварительную характеристику создаваемой системы. Это параметрический и индикаторный вектора, где первый в качестве компонентов содержит описания параметров рi (точечного и интервального формата), а второй – логические (булевы) переменные xi, i=1,2,…,n. Применение этих векторов при планировании системы представляет собой самостоятельную задачу. Важным элементом проектирования с предплановым моделированием на основе ЛПДК является установление соответствия между информационным баллом и обосновывающим его системным технологическим решением.






