| 1.Диаметр маховика
| D=370 мм
|
| 2.Открытие выпускного клапана
| 11  до ВМТ до ВМТ
|
| 3.Закрытие выпускного клапана
| 37 до НМТ
|
| 4.Открытие выпускного клапана
| 33 до НМТ
|
| 5.Закрытие выпускного клапана
| 15 после ВМТ
|
| 6.Момент начала подачи топлива
|
|
| 7.Зазор в клапанах
| 0,25-0,30 мм 
|
Заключительный контроль
1.Зачем и когда проводятся проверки точек ВМТ и НМТ?
2.Почему проверка ВМТ индикатором у больших дизелей дает погрешности?
3.Как проводится градуировка маховика?
Литература:
1. Инструкция по производству обмеров и определению износов основных деталей DBC. –Л.: Судостроение.
Лабораторная работа №49
Тема: Проверка шага гребного винта
Цель: Научить практическим приемам измерения шага гребного винта
Материальное обеспечение:
1. Винт на горизонтальной подставке.
2. Координатный шагомер.
Вводный контроль:
1. Что такое «тяжелый» и «легкий» винт?
2. Методы правки гребного винта.
3. Из каких материалов изготавливаются гребные винты?
Пояснения к работе
Коэффициент полезного действия гребного винта в очень большой степени зависит от соответствия геометрических элементов винта теоретическому чертежу. Прежде всего,это касается отступления по наиболее важным параметрам гребного винта _ шагу всего винта,отдельных лопастей и их сучений («разнобой»).
В условиях эксплуатации имеются случаи искажения геометрии гребного винта,происходящие от ударов гребного винта о грунт, траловые доски и т.п. Кроме того,винты из углеродистой стали обладают низкой стойкостью против коррозии и эрозии и требуют ежегодного ремонта разрушений поверхности лопастей (наплавка коррозированных поверхностей или приварка концов лопастей), в процессе которого лопасти гребных винтов подвергаются деформациям и последующей правке, что вызывает необходимость обмера на соответствие их геометрических элементов паспортным данным.
Для измерения шага гребных винтов в условиях судоремонтных и судостроительных заводов чаще всего применяются переносные координатомеры и угломеры, называемые в практике не совсем правильно шагомерами.
Примечание. «Разнобой» - различие в значении шага разных лопастей,приводящее к гидродинамической неуравновешенности.
Ход работы.
1. Гребной винт установить на стенке нагнетательной поверхностью вверх так. Чтобы торец ступицы занимал возможно более точно горизонтальное положение, т.е. чтобы ось винта была вертикальна.Шпиндель шагомера установить Е отверстие ступицы таким образом, чтобы его геометрическая ось совпадала с осью винта. Для этого шпиндель шагомера снабжен установочными конусными втулками.
По ГОСТу 8054-56 измерение шага винтовой поверхности лопастей должно производиться на радиусах г, составляющих 0,3; 0,5; 0,7; 0,8; 0,95 радиуса гребного винта. Радиус R(рис.30) гребного винта берется средним из замеров по трем лопастям.  Рис. 1. Установка пинта и шагомера.
Рис. 1. Установка пинта и шагомера.
2.Определить конкретные величины радиусов измеряемых сечений.
3.Установить вертикальный щуп на одном из радиусов на расстоянии 10-15мм от кромки лопасти.Зафиксировать высоту и угол.
4.Перенести щуп по данному радиусу к противоположной кромке.Зафиксировать высоту и угол.
5.По полученным данным определить шаг сечения.
6.Шаг лопасти определяется как среднее арифметическое шагов сечений.
7.Шаг винта определяется как среднее арифметическое шагов лопастей.
8.Определить отклонение замеренных шагов лопастей и винта от паспортного значения и выразить в процентах.Сравнить с допусками по ГОСТу.
Номер
Замера
R сечений
|
Расстояние
От центра
R,мм
|
Угол поворота
|
Высота подъема
|  *360,мм *360,мм
| | α1
| α2
| (α)= α2- α1
| h 1
| h 2
| (h)=h2- h1
|
|
Лопасть
|
| 1
| 0,5
|
|
|
|
|
|
|
|
|
| 2
| 0,7
|
|
|
|
|
|
|
|
|
| 3
| 0,9
|
|
|
|
|
|
|
|
|
Заключительный контроль.
1.Что такое тяжелый винт,как он влияет на работу главного двигателя.
2.Что такое лёгкий винт,как он влияет на работу главного двигателя.
3.Как производится правка лопастей стальных винтов.
4.Как производится правка лопастей бронзовых и латунных винтов.
5.Рассказать о классификации гребных винтов.
Литература:
1. Инструкция по производству обмеров и определению износов основных деталей DBC. –Л.: Судостроение.
Лабораторная работа №50
Тема: статическая балансировка гребного винта
Цель: научить практическим приемам балансировки гребных винтов
Материальное обеспечение:
1.Винт на оправке на балансировочном станке
2.Линейка
3.Гаечные ключи
4.Уравновешивающие грузы
5.Штангенциркуль
Пояснения к работе
В результате неточностей при изготовлении и ремонте гребных винтов вес лопастей может быть различен.Вследствии этого при вращении гребного винта появляются неуравновешенные силы которые вызывают добавочные усилия,вибрацию и износ дейдвудного устройства.Эти усилия пропорциональны квадрату частоты вращения и следовательно тем опаснее чем выше обороты гребного винта.
В связи с этим при изготовлении и ремонте гребных винтов необходимо произвести их уравновешивание.Балансировка заключается в приведении к совпадению центра тяжести винта и главной оси инерции с осью вращения.Неуравновешенность винта приводит к появлению центробежной силы или пары сил которые и вызывают вибрацию винта при работе.Центробежная сила возникает при условии что ось инерции параллельна оси вращения,но центр тяжести винта не лежит на оси вращения.
Пара сил возникает когда ось инерции пересекает ось вращения винта на середине его длины.
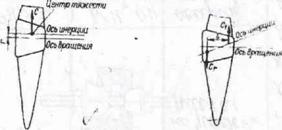
Различают статическую и динамическую балансировку винтов.Статическая балансировка имеет целью устранение неуравновешенности связанной с возникновением центробежной силы.При динамической балансировке устраняется неуравновешенность вызывающая возникновение как центробежной силы так и пары сил.Статическая балансировка считается достаточной при окружной скорости менее 15 м/с и частоте вращения до 500 об/мин.Статическая балансировка производится на стендах:на ножах и на шарике.Статическая балансировка обязательна для всех гребных винтов после их изготовления или ремонта.Уравновешивание достигается снятием металла с тяжелой лопасти или наплавкой на легкую лопасть.При этом изменения не должны нарушать гидродинамику винта или уменьшать прочность лопастей.Наплавка обычно производится на ступицу у корня лопасти или тонким слоем на засасывающую сторону лопасти.При этом важно не выйти за пределы допусков по толщине и ширине лопасти.
Порядок выполнения работы
1.Установить гребной винт на станке,определить легкую и тяжелую лопасти
2.На легкую лопасть установить уравновешивающий груз в виде магнита или мастики.Для проверки лопасть ставят в горизонтальное положение.
3.Аналогично проверяют вторую пару лопастей.Добиваются безразличного положения равновесия.
4.Замеряют расстояние от оси вращения до центра грузика и проеделяют неуравновешенный момент.
5.Занеся данные в таблицу определяют место и величину наплавки (снятия) металла.
6.Написать заключение с рекомендацией по уравновешиванию винта.
| Лопасть винта
| Вес
уравновешивающих грузов
| Радиус установки
Груза Ii,м
| Неуравновешенный момент
| Радиус наплавки,снятия металла
| Вес наплавляемого металла
| Толщина снимаемого наплавляемого слоя металла
| Размеры наплавки
|
|
| 1
|
|
|
|
|
|
|
|
|
| 2
|
|
|
|
|
|
|
|
|
| 3
|
|
|
|
|
|
|
|
|
| 4
|
|
|
|
|
|
|
|
|
Заключительный контроль
1.Для чего производится статическая балансировка гребного винта
2.К чему может привести разбалансировка гребного винта
3.Описать способы уравновешивания винта
Литература:
1. Захаров Г.В. Техническая эксплуатация судовых дизельных установок – Изд. 3-е. испр. И доп. – М.: Транс Лит, 2013.- 320с
Лабораторная работа №51
Тема: Проверка укладки валопровода по изломам и смещениям с помощью линейки и щупа
Цель: Практическое освоение методов центровки валов.
Материальное обеспечение:
1. Установка для центровки валов
2. Линейка проверочная,щуп,мерительные плитки
3. Ключи и набор прокладок разной толщины под опоры вала(механизма)
4. Линейка стальная,щупы
Вводный контроль:
1. Какие последствия вызывают изломы и смещения валов?
2. Что является причиной появления изломов и смещений?
3. Почему при замерах необходимо удалить призонные болты?
Пояснения к работе
В повседневной практической работе на судне механикам часто приходится сталкиваться с центровкой валов.Спаривание механизмов (электродвигатель- компрессор,генератор-дизель,электродвигатель-насос), проверка положения линии вала, а в некоторых случаях и его центровка делают необходимыми знания простейших способов центровки.Наиболее ответственная и сложная работа – центровка валогребной линии.
Раньше считалось,что для нормальной долговечной работы валогребной линии все оси валов должны лежать на одной прямой и составлять продолжение осевой линии вала главного механизма.Единственным способом контроля прямолинейности валогребной линии являлся контроль фланцевых соединений отдельных валов, включая дейдвудный и вал главного механизма.
В конце 60-х годов нашего века появилась новая теория,доказывающая,что лучшей будет криволинейная укладка обеспечением одинаковых нагрузок на подшипники. Появился и новый способ контроля – по нагрузкам на подшипниках.
В процесссе эксплуатации в результате износа подшипников,деформаций корпуса судна происходит нарушение соосностивалогребнойлинии.Эти отклонения могут быть настолько велики,что может потребоваться переустановка главного двигателя или дейдвудной трубы.Так как подобные работы весьма трудоемки,положениевалогребной линии необходимо знать вначале ремонта или,по крайней мере,перед постановкой судна в док или на слип.Проверка положения главного двигателя относительно дейдвудного вала может быть осуществлена с помощью оптических приборов,путем определения смещений и изломов отдельных валов по их фланцевым соединениям или по нагрузкам на подшипниках.
При монтаже валогребной линии на строящемся судне,если не применяются оптические приборы,окончательная центровка двигателя производится после укладки всех промежуточных валов,причемсоосность укладываемых валов определяется также измерением изломов и смещений на фланцевых соединениях.
Более прогрессивным способом является установка главного двигателя до укладки промежуточных валов с применением оптических приборов,но и в этом случае окончательная укладка промежуточных валов производится с контролем по фланцевым соединениям,если не применяется укладка по нагрузкам на подшипниках.Такимобразом,освоение практики контроля прямолинейности валогребной линии путем измерения смещений и изломов по соединяемым фланцам является необходимым.
Технические условия на укладку по Правилам Регистра:
Смещение e =±0,1 мм;
Излом i =0,15мм/м.
Под смещением понимается отклонение оси одного вала относительно другого в радиальном направлении в вертикальной и горизонтальной плоскости.Положительным считается смещение если ось носового вала смещена вниз или к правому борту относительно кормового вала.
Пол изломом понимается отклонение от параллельности осевых линий валов.При раскрытии фланцев вверх и со стороны левого борта излом положителен.
Замеры изломов и смещений повторяются после поворота валов на 180 градусов.Это позволяет повысить точность замеров т.к. устраняется влияние овальности и биения фланцев на точность замеров.
Ход работы.
1.Ослабить фланцевые болты отвернув их на два-три оборота гайки.
2.Слегка раздвинуть фланцы.
3.Приложив контрольную линейку к образующей одного из фланцев померить щупом величину смещения в положениях верх,низ,левый борт,правый борт.
4.Померить величины изломов с помощью щупов по зазору между торцами фланцев.
5.Провернуть валы на 180 градусов и повторить замеры.
Номер фланцевого соединения
Место замера
|
Величина зазора
|
Смещение,мм
| | 1 положение
| 2 положение
|
|
| Верх
|
|
|
|
|
| Низ
|
|
|
|
|
| Правый борт
|
|
|
|
|
| Левый борт
|
|
|
|
|
Номер фланцевого соединения
|
Место замера
|
Величина зазора
|
D фланцев,мм
|
Излом,мм/м
|
| 1 положение
| 2 положение
| Среднее значение
|
|
| Верх
|
|
|
|
|
|
|
| Низ
|
|
|
|
|
|
|
| Правый борт
|
|
|
|
|
|
|
| Левый борт
|
|
|
|
|
|
Заключительный контроль.
1.Чем опасны изломы и смещения.
2.Как спрямить ось валопровода.
3.Где ещё может применяться метод замера изломов и смещений.
Литература:
1. Захаров Г.В. Техническая эксплуатация судовых дизельных установок – Изд. 3-е. испр. И доп. – М.: Транс Лит, 2013.- 320с
Лабораторная работа №52
Тема: проверка центровки валопровода с помощью двух пар стрел
Цель: практическое освоение методов центровки валов
Материальное обеспечение:
1.Установка для центровки валов
2.Две пары стрел
3.Щупы
4.Слесарный инструмент
Вводный контроль:
1.Перечислить рекомендации Регистра к центровке валопровода
2.Как можно спрямить линию валопровода?
Пояснения к работе
Стрелки представляют собой регулируемые приспособления устанваливаемые на фланцах валов.Фланцы должны быть раздвинуты,а призонный крепеж снят.С помощью щупа все стрелки выставляют на один размер (например,1 мм) и записывают его в таблицу.Затем валы поворачивают на 90 градусов,замеряя зазоры и записывая результаты.Вращение валов должно производится только в одну сторону.Этот способ дает более высокую точность чем центровка с помощью линейки и щупа т.к. исключается влияние погрешностей местных дефектов образующей фланцев.
Таблица замеров
| Форма 1
| Номер фланцевого соединения
| Место замера
| Величина зазора
| Смещение, мм
| | 1 положение
| 2 положение
| |
| Верх
|
|
|
| |
| Низ
|
|
|
| |
| Правый борт
|
|
|
| |
| Левый борт
|
|
|
| |
| Форма 2
| Номер фланцевого соединения
| Место замера
| Величина зазора
| D фланцев, м
| Излом,мм/м
| | 1
положение
| 2
положение
| Среднеезначение
| |
| Верх
|
|
|
|
|
| |
| Низ
|
|
|
|
|
| |
| Правый борт
|
|
|
|
|
| |
| Левый борт
|
|
|
|
|
| |
Заключительный контроль
1.Описать последствия расцентровки валов
2.Где кроме валопровода может применяться центровка по изломам и смещениям?
Литература:
1. Захаров Г.В. Техническая эксплуатация судовых дизельных установок – Изд. 3-е. испр. И доп. – М.: Транс Лит, 2013.- 320с
Лабораторная работа №53
Тема: разборка и дефектация насоса
Цель: научиться дефектовать насосы
Материальное обеспечение:
1.Насос любого типа
2.Слесарный инструмент для разборки насоса
3.Измерительный инструмент
4.Образец дефектовочной ведомости
Вводный контроль:
1.Описать свойства и параметры данного типа насосов
2.Описать применение подобных насосов на судне
3.Описать типичные неисправности насосов данного типа
Пояснения к работе
На рабочем месте располагается насос отработавший достаточно долгий срок и подлежащий ремонту,чертежи насоса и инструкции по разборке.
Также прилагается схема обмера применительно к данному насосу.
При наличии подшипников качения кроме визуального осмотра можно замерить зазоры с помощью специальных приспособлений.
Также на рабочем месте должна быть нормативная документация для оценки состояния механизма.
В отчете следует привести схему обмеров,даже если они не производились.А также результаты визуального осмотра.
В разделе заключения должны быть указаны замеченные дефекты и неисправности,а также возможные методы ремонта.Должна быть составлена дефектовочная ведомость по образцу.
Порядок выполнения работы
1.Ознакомиться с устройством насоса.
2.Разобрать насос
3.Произвести подетальную дефектацию результаты отразить в отчете.
4.Составить дефектовочную ведомость.
5.Собрать насос и предъявить руководителю
6.Ответить на контрольные вопросы
Заключительный контроль
1.Описать типичные неисправности данного насоса
2.Описать причины типичных неисправностей насоса
3.Описать возможные методы ремонта данного насоса
Литература:
1. Захаров Г.В. Техническая эксплуатация судовых дизельных установок – Изд. 3-е. испр. И доп. – М.: Транс Лит, 2013.- 320с
Лабораторная работа №54
Тема: разборка и дефектация компрессора
Цель: получение практических навыков разборки и дефектации узлов и деталей компрессора
Материальное обеспечение:
1.Компрессор
2.Слесарный инструмент для разборки
3.Образец дефектовочной ведомости
Вводный контроль:
1.Как устанавливается и регулируется давление нагнетания поршневого компрессора?
2.Описать применение и необходимость двухступенчатых компрессоров
3.Для чего производится промежуточное охлаждение воздуха в ступенчатых компрессорах?
Пояснения к работе
Для разборки и дефектации предоставляется любой компрессор средних размеров и сложности.При дефектации следует особое внимание уделить узлам и деталям оригинальным для данного механизма и не встречавшимся в предыдущих работах.
В работу следует включить операцию выемки поршня и постановки его на место,т.к. у большинства типов компрессоров заведение колец во втулку представляет определенную сложность.
В отчете должна быть представлена схема обмеров даже если таковые не производились.В разделе заключение записываются результаты дефектации,рекомендации по ремонту или замене деталей.Должна быть составлена дефектовочная ведомость.
Порядок выполнения работы
1.Ознакомиться с устройством и схемой компрессора
2.Произвести разборку компрессора согласно указаниям преподавателя
3.Произвести дефектацию узлов и деталей,результаты отразить в отчете
4.Составить дефектовочную ведомость
5.Собрать компрессор и предъявить руководителю
6.Ответить на вопросы заключительного контроля
Заключительный контроль
1.К чему приведет износ или повреждение уплотнения вала
2.Какие последствия может вызвать сквозное коррозионное разъедание цилиндровой втулки
3.К чему может привести свищ в змеевике промежуточного холодильника
Литература:
1. Захаров Г.В. Техническая эксплуатация судовых дизельных установок – Изд. 3-е. испр. И доп. – М.: Транс Лит, 2013.- 320с
Лабораторная работа №55.
Тема:. Изучение структуры и элементов системы дистанционного автоматизированного управления дизельными установками
Цель: Усвоить общую ориентацию в предметах регулирования, связях (цепях) объекта регулирования с органами управления
Материальное обеспечение: учебный раздаточный материал, плакат.
Вводный контроль:
5. Дать понятие термину управление.
6. Привести классификацию систем управления.
7. Каковы задачи основных элементов САР
8. Функциональная зависимость элементов систем автоматического регулирования..
Краткие рекомендации
 Система автоматического регулирования с регулятором прямого действия состоит из объекта и регулятора прямого действия (рис. 2.3). Регулятор включает в себя три основных элемента: чувствительный элемент, элемент сравнения и задающий элемент. Как видно из схемы, регулятор получае входной сигнал ХВх и в зависимости от негоРассматривая предложенный материал, вспомните, каковы задачи цепей САР и их устройств, степень зависимости от входного и входного сигналов. Расшифровку аббревиатуры делайте обширнее, размеры площади страницы для рисунка, схемы – не менее половины страницы. Уделить внимание задатчикам цепей. По окончании изучения рисунка системы нужно сначала мысленно представить себе ее, затем без помощи рисунка воспроизвести ее на черновике. вырабатывает выходной сигнал Увык, направленный на перемещение исполнительного органа.
Система автоматического регулирования с регулятором прямого действия состоит из объекта и регулятора прямого действия (рис. 2.3). Регулятор включает в себя три основных элемента: чувствительный элемент, элемент сравнения и задающий элемент. Как видно из схемы, регулятор получае входной сигнал ХВх и в зависимости от негоРассматривая предложенный материал, вспомните, каковы задачи цепей САР и их устройств, степень зависимости от входного и входного сигналов. Расшифровку аббревиатуры делайте обширнее, размеры площади страницы для рисунка, схемы – не менее половины страницы. Уделить внимание задатчикам цепей. По окончании изучения рисунка системы нужно сначала мысленно представить себе ее, затем без помощи рисунка воспроизвести ее на черновике. вырабатывает выходной сигнал Увык, направленный на перемещение исполнительного органа.
Чувствительный элемент регулятора непрерывно замеряет контролируемый параметр Хы. и преобразует его в выходной сигнал чувствительного элемента Хч.э.
Задающий элемент регулятора подает постоянный сигнал Х3.э. на элемент сравнения. Величина этого сигаала соответствует величине выходного сигнала чувствительного элемента, при которой регулируемый параметр Хт является заданным. Этот сигнал задающего элемента служит как бы эталоном, который позволяет учесть величину и знак отклонения регулируемого параметра от заданного значения. Обычно задающий элемент имеет устройство для изменения задания, позволяющее изменять величину ситаала задающего элемента в ту или иную сторону.
Элемент сравнения сравнивает поданные на него встречные сигналы чувствительного и задающего элемента и вырабатывает общий сигнал Увых, который передается на исполнительный орган объекта. При равенстве подаваемых на элемент сравнения сигналов общий сигнал рассогласования Увых равен нулю, т. е. на исполнительный орган команды не подается, и последний не перемещается.
Исполнительный орган получает от элемента сравнения сигнал Увых и в зависимости от его значения и знака (+ или -) изменяет количество энергии или вещества, подводимого к объекту.
Из рассмотренной схемы прямого автоматического регулирования видно, что для перемещения исполнительного органа энергия отбирается от самого объекта в виде энергии входного сигнала Хвх, которую чувствительный элемент преобразует в какое-то усилие Хч.э. Таким образом, мощность сигнала Увых зависит от мощности сигнала чувствительного элемента(Увх<Хч.э) Для получения УВЫх значительной величины необходимы большие габариты чувствительного элемента и регулятора прямого действия в целом. Поэтому регуляторы прямого действия применяются на объектах малой и средней мощности
Порядок выполнения работы
Задание 1 Ознакомиться с раздаточным материалом, где, по ходу прочтения, выписать столбиком и объяснить буквенные и цифровые условные обозначения, изучить схему САР и попытаться сначала воспроизвести ее карандашом по памяти, а затем дополнить схему недостающими элементами.
Задание 2 Дать письменное объяснение и определение следующему: ОР, ЗУ,ЧЭ, ЭС, УМ(УУ),ИМ, ЖОС,ГОС,ИЭ,
Задание 3 Дать краткие ответы на вопросы о возмущающем воздействии: определение, классификация, принцип устройства и работы вышеперечисленных элементов..
Задание 4 Сделать выводы.
Содержание отчета:
1. Тема и цель практического занятия.
2. Выполненное задание.
3. Вывод по работе.
Заключительный контроль:
1. Дать определение,что называется объектом управления?
2. Привести конкретные примеры элементов автоматических систем.
3. Назначение устройств перечисленных в работе.
4. Описать порядок работы систем автоматического регулирования по схеме указанной в работе.
Литература
1. Методические указания к выполнению лабораторных и практических работ по дисциплине «Судовые дизельные энергетические установки и их эксплуатация», 2014г..
2. Прохоренков А.М. Системы управления судовыми энергетическими процессами. Издательство Моркнига, 2017г. 442 с.
Лабораторная работа №56
Тема: Построение статической и динамической характеристики регулятора прямого и непрямого действия
Цель: Усвоить порядок построение графиков статической и динамической характеристики регулятора прямого и непрямого действия
Материальное обеспечение: учебный раздаточный материал, плакат.
Вводный контроль:
1. Дать определение САР,САУ.
2. Объяснить назначение и функции САР и САУ
3. Объяснить принцип действия САР прямого действия.
4. Объяснить принцип действия САР непрямого действия
5. Объяснить в чём принципиальное различие между регуляторами простого и непростого действия.
Краткие рекомендации
Как всякая материальная система, система прямого и непрямого автоматического регулирования может находиться в двух состояниях: статическом, т. е. равновесном, когда все ее звенья находятся в относительном покое и величина регулируемого параметра не меняется, и динамическом, когда все звенья системы находятся в движений и величина регулируемого параметра изменяется.
 Примером статического состояния является такое состояние, при котором количество подаваемого в цилиндры двигателя топлива соответствует внешней нагрузке; рейка топливных насосов в это время не перемещается, и частота вращения коленчатого вала двигателя не меняется. Это состояние системы описывается дифференциальными уравнениями. Более наглядно такое состояние можно изобразить графически, определяя значение входного сигнала при равновесном состоянии в зависимости от положения исполнительного органа или, что идентично, в зависимости от нагрузки Построенный по этим значениям график называется статической характеристикой системы автоматического регулирования.
Примером статического состояния является такое состояние, при котором количество подаваемого в цилиндры двигателя топлива соответствует внешней нагрузке; рейка топливных насосов в это время не перемещается, и частота вращения коленчатого вала двигателя не меняется. Это состояние системы описывается дифференциальными уравнениями. Более наглядно такое состояние можно изобразить графически, определяя значение входного сигнала при равновесном состоянии в зависимости от положения исполнительного органа или, что идентично, в зависимости от нагрузки Построенный по этим значениям график называется статической характеристикой системы автоматического регулирования.
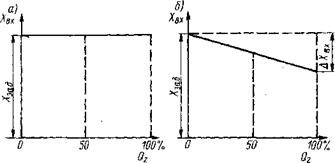
Рис. 2.5. Статические характеристики
Эта характеристика может быть двух видов: астатическая (рис. 2.5,а) и статическая (рис.2.5,б). В первом случае любому значению нагрузки в установившемся режиме соответствует одно и то же значение входного сигнала, во втором случае разным значениям нагрузки соответствуют разные значения входного сигнала.
Практически эта характеристика строится следующим образом: объекту последовательно устанавливают нагрузки 0,25, 50, 75,100% и при этих нагрузках в установившихся режимах определяют значения входного сигнала, который в эти моменты будет постоянным. Затем по полученным точкам строят график - статическую характеристику. Чем больше будет взято точек, тем точнее будет построена эта характеристика. Следует отметить, что построенная характеристика реального объекта, как правило, нелинейна.
Разность значений входного сигнала в установившемся режиме, замеренных при нулевой и полной нагрузках, называется статической ошибкой, или зоной неравномерности автоматической системы. ∆ Хвх (рис.2.5,б). Для качественной оценки этой величины вводят понятие степени неравномерности, которая определяется отношением величины зоны неравномерности ∆Хвх к величине заданного параметра Хзад. Степень неравномерности обычно определяется в процентах:
∆=(Хвх/ Хзад)*100%
В астатических системах эта величина равна нулю, а в статических имеет значение, отличное от нуля. -
Из-за наличия зазоров, сил трения и сил инерции регулятор начинает действовать на объект не одновременно с изменением регулируемой величины, а только после того, как она уже изменится на определенное значение. Такое свойство регулятора называется его нечувствительностью. Зона изменения входного сигнала, при которой выходной сигнал регулятора еще равен нулю, называется зоной нечувствительности Е. Зона нечувствительности является одной из важных технических характеристик системы автоматического регулирования. В пределах зоны нечувствительности регулятор не воздействует на процесс, и таким образом, статическая характеристика будет представляться не линией, а некоторой полоской шириной Е. В связи с этим вводится понятие степени нечувствительности системы автоматического регулирования, которая определяется отношением зоны нечувствительности к величине заданного параметра Хзад
ἐ=(Е/ Хзад)*100%
Эта величина для действующих судовых автоматических систем составляет 1-4 %.
Динамическое состояние автоматической системы - это такое состояние, когда Q1≠Q2, Хвх изменяется, Хчэ =Х3.Э, Yвх = 0 и исполнительный орган в это время перемещается. Динамическое состояние системы аналитически выражается дифференциальными уравнениями, а графически в виде графика, где по оси абсцисс откладывается время Т (в секундах), а при оси ординат - значение входного сигнала Хвх.
 Этот график строят следующим образом: изменяют внешнюю нагрузку на объект и через определенные промежутки времени определяют величину входного сигнала до тех пор, пока он не станет постоянным (автоматическая система придет в равновесное состояние). По полученным данным строят график с осями входной сигнал Хвх - время Т.
Этот график строят следующим образом: изменяют внешнюю нагрузку на объект и через определенные промежутки времени определяют величину входного сигнала до тех пор, пока он не станет постоянным (автоматическая система придет в равновесное состояние). По полученным данным строят график с осями входной сигнал Хвх - время Т.
Один из таких графиков изображен на рис. 2.6. По графику переходного процесса судят о качестве и показателях переходного процесса автоматической системы регулирования:
- величина Т пер называется временем переходного процесса, т. е. это период времени, по истечении которого отклонение входного сигнала Хвх от заданного значения Хза д не будет превышать величины Е, т. е. рассмотренной ранее зоны нечувствительности. Например, при регулировании частоты вращения коленчатого вала
Например, при регулировании частоты вращения коленчатого вала двигателя внутреннего сгорания время переходного процесса должно составлять 1-5 с, при регулировании уровня воды в паровом котле 5-10 с, при регулировании температуры охлаждающей воды системы охлаждения двигателя 5-15 мин;
- максимальное отклонение входного сигнала от заданного значения ∆ Хвх. По условиям работы объектов эта величина не должна превышать заданные значения. Например, при регулировании частоты вращения судовых двигателей внутреннего сгорания эта величина не должна превышать 10% номинальной, заданной частоты вращения; при регулировании уровня вода в паровом котле 50 мм уровня; при регулировании температуры воды и масла двигателей внутреннего сгорания ±5*С. А

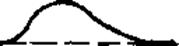 По внешнему виду графики переходных процессов могут быть разными. При апериодическом переходном процессе (рис. 2.7,а) при изменении нагрузки входной сигнал меняется до определенного значения, а затем плавно восстанавливается до заданного значения. В случае колебательного затухающего процесса (рис.2.7,б) при изменении нагрузки входной сигнал изменяется до определенного значения, затем начинает приближаться к заданному значению, но вследствие инерции звеньев системы не устанавливается на заданном значении, а изменяется в другую сторону, но уже с меньшим отклонением. Входной сигнал начинает вновь изменяться в обратную сторону, его отклонение от заданного значения вновь будет уменьшаться. Процесс регулирования закончится, когда колебания входного сигнала выровняются. При колебательном расходящемся переходном процессе отклонения входного сигнала от заданного значения все время увеличиваются (рис.2.7,в). Первые два вида переходных процессов применяются в действующих автоматических системах, а последний свидетельствует о неправильном выборе или настройке регулятора и применяться, естественно, не может.
По внешнему виду графики переходных процессов могут быть разными. При апериодическом переходном процессе (рис. 2.7,а) при изменении нагрузки входной сигнал меняется до определенного значения, а затем плавно восстанавливается до заданного значения. В случае колебательного затухающего процесса (рис.2.7,б) при изменении нагрузки входной сигнал изменяется до определенного значения, затем начинает приближаться к заданному значению, но вследствие инерции звеньев системы не устанавливается на заданном значении, а изменяется в другую сторону, но уже с меньшим отклонением. Входной сигнал начинает вновь изменяться в обратную сторону, его отклонение от заданного значения вновь будет уменьшаться. Процесс регулирования закончится, когда колебания входного сигнала выровняются. При колебательном расходящемся переходном процессе отклонения входного сигнала от заданного значения все время увеличиваются (рис.2.7,в). Первые два вида переходных процессов применяются в действующих автоматических системах, а последний свидетельствует о неправильном выборе или настройке регулятора и применяться, естественно, не может.
Порядок выполнения работы
Задание 1 Усвоить содержание описательной и графической частей практического занятия, по ходу прочтения выписать столбиком условные обозначения с расшифровкой.
Задание 2 Приступить ко вторичному чтению той части задания, которая рассматривает принципы построения графиков статической и динамической характеристики регулятора прямого и непрямого действия
Задание 3 Дать объяснение основным терминам, использованным в работе.
Задание 4Дать комментарии к рисункам о том, как называется, выражается и какой из этих рисунков следует вывод.
Содержание отчета:
1. Тема
2. Цель лабораторной раб






