Помимо рассмотренных ранее погрешностей при обработке на станках с ЧПУ имеют место специфические погрешности обработки, к которым прежде всего относятся погрешности аппроксимации и интерполяции. Они возникают на стадии подготовки управляющей программы при обработке криволинейных контуров.
Погрешность аппроксимации возникает в результате замены криволинейного контура между опорными точками обрабатываемого профиля близким к нему прямолинейным или криволинейным контуром, имеющимся в устройстве ЧПУ. Такая замена необходима в связи с наличием в устройстве ЧПУ определенного математического обеспечения в системе управления контурными перемещениями. Современные устройства ЧПУ имеют линейную и круговую интерполяцию, обеспечивающую перемещение исполнительного органа по прямой или дуге окружности. На рис. 5.19, а показан пример замены криволинейной поверхности на участке АВ отрезками прямой 1 (линейная аппроксимация) и дугой окружности 2 (круговая аппроксимация). На рисунке видно, что погрешность аппроксимации а — чисто геометрическая величина. Ее можно сколь угодно уменьшить, сближая точки А и В, т. е. увеличивая число опорных точек на программируемой поверхности. При обработке цилиндрических, конических, торцевых, сферических и тороидальных поверхностей эта погрешность равна нулю.
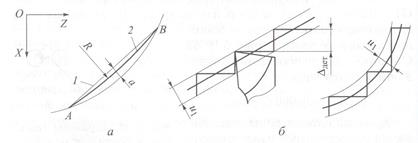
Рис. 5.19. Погрешности аппроксимации (а) и интерполяции (б)
Погрешность интерполяции возникает в результате замены аппроксимирующих прямых и криволинейных отрезков ступенчатой линией. Это обусловлено спецификой работы приводов станка с ЧПУ, которые работают в строгой последовательности и не могут функционировать одновременно. На рис. 5.19, б показаны схемы замены наклонного и криволинейного участков ступенчатой линией, образуемой поочередным включением продольной и поперечной подач. В результате возникает погрешность индикации  . Поскольку в современных станках разрешение системы ЧПУ приближается к 0,001 мм, то возникающую при этом погрешность можно не учитывать.
. Поскольку в современных станках разрешение системы ЧПУ приближается к 0,001 мм, то возникающую при этом погрешность можно не учитывать.
При воспроизведении управляющей программы на станке с ЧПУ возникает погрешность позиционирования исполнительных органов, которая зависит от многих факторов: перемещающейся массы (стола с заготовкой), скорости перемещения, типа обратной связи, способа подхода исполнительного органа в заданное положение, точности работы и изготовления привода подач и т. д. Погрешность позиционирования имеет систематическую  и случайную
и случайную  составляющие. На рис. 5.20, а эти составляющие показаны при многократном п перемещении исполнительного органа из одной точки в другую, а на рис. 5.20, б — в зависимости от перемещения L исполнительного органа. Видно (см. рис. 5.20, б), что случайная составляющая погрешности позиционирования почти не зависит от перемещения, тогда как систематическая составляющая может изменяться достаточно заметно.
составляющие. На рис. 5.20, а эти составляющие показаны при многократном п перемещении исполнительного органа из одной точки в другую, а на рис. 5.20, б — в зависимости от перемещения L исполнительного органа. Видно (см. рис. 5.20, б), что случайная составляющая погрешности позиционирования почти не зависит от перемещения, тогда как систематическая составляющая может изменяться достаточно заметно.
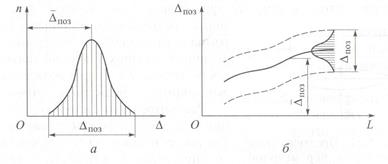 Рис. 5.20. Составляющие погрешности позиционирования
Рис. 5.20. Составляющие погрешности позиционирования
Современные системы ЧПУ позволяют по результатам эксперимента (см. рис. 5.20, б) определить закон изменения  = f (L) и ввести его в устройство ЧПУ. Система ЧПУ в этом случае обеспечит полную компенсацию этой погрешности при перемещении исполнительного органа. Для уменьшения систематической и случайной составляющих погрешности позиционирования в станках с ЧПУ предусматривают обратную связь по перемещению исполнительного органа (замкнутые системы ЧПУ), применяют гидро- и пневмостатические направляющие, винтовые пары качения, вибрационные устройства в приводе подач и другие решения, уменьшающие вредное влияние сил трения.
= f (L) и ввести его в устройство ЧПУ. Система ЧПУ в этом случае обеспечит полную компенсацию этой погрешности при перемещении исполнительного органа. Для уменьшения систематической и случайной составляющих погрешности позиционирования в станках с ЧПУ предусматривают обратную связь по перемещению исполнительного органа (замкнутые системы ЧПУ), применяют гидро- и пневмостатические направляющие, винтовые пары качения, вибрационные устройства в приводе подач и другие решения, уменьшающие вредное влияние сил трения.
Станки с ЧПУ обеспечивают возможность компенсации погрешности формы, а в ряде случаев и взаимного расположения путем целенаправленного ввода предыскажений в управляющую программу одним из следующих способов:
1) предыскажением траектории перемещения инструмента при выполнении последнего для данной поверхности перехода;
2) изменением рабочей подачи при обработке;
3) изменением глубины резания или предыскажением траектории перемещения инструмента при выполнении предпоследнего для данной поверхности перехода.
Рассмотрим сущность первого способа на примере токарной обработки. Предположим, что форма образующей поверхности, которую нам нужно получить, соответствует цилиндрической поверхности 1 (рис. 5.21). При обработке имеет место погрешность
формы, текущие значения которой описываются функцией A(Z).
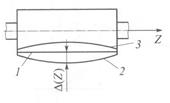
Рис.5.21. Предыскажение траектории перемещения инструмента
Поэтому фактическая форма образующей поверхности, обработанной без предыска-жения, соответствует кривой 2. Сущность метода состоит в том, что траекторию 3 перемещения инструмента предыскажают в процессе подготовки управляющей программы на величину текущих значений погрешности формы, т. е. форма должна быть зеркальным отображением кривой 2.
Рассмотренный метод компенсации погрешности формы весьма прост. Его расчет основан на геометрических соотношениях и адекватен реально выполняемому предыскажению. Искаженную траекторию записывают в нескольких кадрах программы для каждой опорной точки (при обработке без предыскажения ее записывают в одном кадре), поэтому в момент перехода из одной опорной точки в другую подача инструмента на какой-то момент времени прекращается, сила резания уменьшается и происходит упругое восстановление системы. Это обусловливает появление кольцевых рисок. Кроме того, ввиду ступенчатого характера перемещения инструмента образующая поверхность после обработки не является прямолинейной. Поэтому данный способ целесообразно применять для предварительной обработки поверхности.
Помимо токарной обработки предыскажение траектории перемещения инструмента весьма эффективно для компенсации погрешности формы при фрезеровании концевыми фрезами угловых сопряжений.






