

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
При идеальных голономных удерживающих связях, наложенных на систему, имеет место общее уравнение динамики:
 (79)
(79)
или
 ( 80)
( 80)
уравнение (79) можно переписать в виде
 (81)
(81)
т. е. при движении системы с идеальными голономными удерживающими связями сумма элементарных работ активных сил и сил инерции равна нулю на всяком возможном перемещении системы из любого ее положения.
Работу сил инерции твердого тела, вращающегося вокруг неподвижной оси, при элементарном повороте δφ вокруг оси вращения определяют формулой
 , (82)
, (82)
где Jz - момент инерции тела относительно оси враще-ния. В случае наличия сил трения их нужно причислять к активным силам.
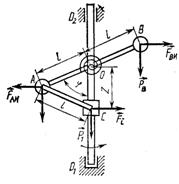 Пример 1. (рис. 567). Центробежный тахометр состоит из двух точечных масс А и В, соединенных между собой стерж-нем, муфты С, скрепленной с массой А с помощью стержня АС и спиральной пружины. Стержень АВ может поворачивать-ся вокруг оси О, перпендикулярной оси тахометра O 1 O 2. При отсутствии вращения стержень АВ образует с осью тахометра угол φ 0. Определить зависимость угловой скорости тахометра от угла φ, если масса тА = тВ = т, а масса муфты равна m 1. Жесткость спиральной пружины принять равной с и считать
Пример 1. (рис. 567). Центробежный тахометр состоит из двух точечных масс А и В, соединенных между собой стерж-нем, муфты С, скрепленной с массой А с помощью стержня АС и спиральной пружины. Стержень АВ может поворачивать-ся вокруг оси О, перпендикулярной оси тахометра O 1 O 2. При отсутствии вращения стержень АВ образует с осью тахометра угол φ 0. Определить зависимость угловой скорости тахометра от угла φ, если масса тА = тВ = т, а масса муфты равна m 1. Жесткость спиральной пружины принять равной с и считать
ОА = OВ = АС = l. Массой стержней и трением пренебречь.
Решение. Система состоит из точечных масс A и В и муф-ты С. Активными силами являются веса и упругие силы
пружины, момент последних M упр = C(φ – φ 0). Приложим условно к точкам системы силы инерции:

Pис. 567 Так как  , а
, а  в силу равномерности вращения, то
в силу равномерности вращения, то  , т. е.
, т. е.
aA = ω 2 l sin φ.
Таким образом,
FAи = FВи = mω 2 l sin φ.
При этом силы инерции являются центробежными и направлены перпендикулярно оси вращения.
Если не пренебрегать размерами муфты, то к каждой частице муфты будет приложена сила инерции  , также являющаяся центробежной. Приложив силы инерции, сооб-щим системе возможное перемещение δφ, повернув мысленно стержень АВ вокруг точки О в плоскости рисунка. Определим элементарную работу задаваемых сил и сил инерции.
, также являющаяся центробежной. Приложив силы инерции, сооб-щим системе возможное перемещение δφ, повернув мысленно стержень АВ вокруг точки О в плоскости рисунка. Определим элементарную работу задаваемых сил и сил инерции.
|
|
При повороте твердого тела  . Обозначая РА = РВ = P = тg - веса грузов, получим:
. Обозначая РА = РВ = P = тg - веса грузов, получим:
 ;
;  ;
;
 ;
;  .
.
Работа упругих сил  /
/
Работу веса  муфты С найдемпо формуле
муфты С найдемпо формуле
 ,
,
где δz - изменение расстояния муфты от точки О.
Так как z = l cos φ, то  и, следовательно,
и, следовательно,  .
.
Работа сил инерции на возможном перемещении равна
нулю, так как эти силы перпендикулярны элементарным пере-мещениям. Таким образом, согласно (81)
 .
.
Подставив найденные значения, получим
 ,
,
отсюда
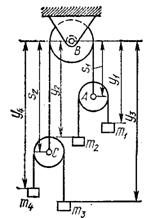
Пример 2. Система состоит из четырех масс m 1, m 2, т 3, т 4, соеди-ненных попарно и подвешенных с помощью блоков А, В, С (рис. 568). Определить, при каком соотношении масс груз с массой т 4 будет оста-ваться на месте, если в начальный момент система находилась в покое. Массой блоков, нитей и трением пренебречь.
Решение. Система имеет три степени свободы. Обозначим абсо-лютные координаты грузов через y 1,
Рис.568 у 2, у 3, у 4. Активными силами
являются веса. Согласно уравнению (80)
 .
.
Установим зависимость между перемещениями δ y 1, δу 2, δу 3, δу 4. для чего составим уравнения связей. Так как все нити предполагаются нерастяжимыми, то, обозначая через L 1, L 2, L 3 длины нитей, получим
y 1- s 1+ у 2 - s 1 + πrA = L 1; s 1+ s 2 + πB = L 2; у 3 - s2 + у 4 - s 2 + πrC = L 3.
Умножая второе уравнение на 2 и складывая все три уравнения (чтобы исключить s 1 и s 2), получим
y 1 + у 2 + у 3 + у 4 = 2 L 2 - 2 πrB + L 1 + πrA+ L 3 - πrC = const.
(поскольку система имеет три степени свободы, это единст-венное уравнение связи). Варьируя, найдем δ y 1+ δу 2+ δу 3+ δу 4= 0, а дважды дифференцируя по времени, получим
a l + a 2 + a 3 + a 4 = 0.
Заменяя δy 4 его выражением через δ y 1, δу 2, δу 3,получим
[ m 1(a 1 - g) - m 4(a 4 - g)]δ y 1 + [ m 2(a 2 - g) - m 4(a 4 - g)] δу 2 +
+[ m 3(a 3 - g) - m 4(a 4 - g)] δу 3 = 0.
|
|
Так как вариации δy 1, δу 2, δу 3 взаимно независимы, то коэффициенты при них должны быть равны пулю, отсюда
m 1(a 1 - g) = m 4(a 4 - g);
m 2(a 2 - g) = m 4(a 4 - g);
m 3(a 3 - g) = m 4(a 4 - g).
Умножая эти равенства соответственно на т 2 т 3, т 1 m 3, т 1 т 2 и складывая, получим
 .
.
Для того чтобы груз массой т 4 при отсутствии начальной скорости не двигался, необходимо, чтобы a 4 = 0, т. е.
 .
.
Разделив обе части этого соотношения на т 1 т 2 т 3, можем представить его в виде
 .
.
Это и есть искомая зависимость между массами грузов.
Задачи
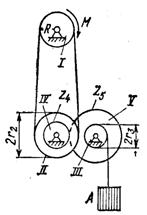
3.9.1*. К ведущему барабану I радиусом R подъемного механизма приложен постоянный вращающий момент М (рис. 528). Oпределить модуль ускорения поднимаемого груза А, если радиусы барабанов //
Рис. 569 и III соответственно равны r 2 и r 3, передаточное число z 5 /z 4 = u, а масса груза равна т,не учитывая масс вращающихся частей и тросов и пренеб-регая трением в осях.
Ответ: 
3.9.2*. Решить предыдущую задачу с учетом масс вращающихся частей механизма, приняв моменты инерции: ведущего барабана – J 1, барабана II с зубчатым колесом – J 2 барабана III с зубчатым колесом – J 3.
Ответ:  .
.
 3.9.3*. На трех сплошных однородных валах (рис. 570), к каждому из которых приложен вращающий момент М, находится балка массой т 2. Определить мо-дуль ускорения балки, если масса каждого вала равна т 1, а радиус равен r, считая, что между валами и балкой сколь-жение отсутствует. Трением в
3.9.3*. На трех сплошных однородных валах (рис. 570), к каждому из которых приложен вращающий момент М, находится балка массой т 2. Определить мо-дуль ускорения балки, если масса каждого вала равна т 1, а радиус равен r, считая, что между валами и балкой сколь-жение отсутствует. Трением в
Рис. 570 осях пренебречь.
Ответ:  .
.
Определение обобщенных сил инерции в системах с одной и двумя степенями свободы
3.9.4. Могут ли элементарные работы сил инерции в общем уравнении динамики, составленном для механической системы с одной степенью свободы, иметь разные знаки? (Нет)
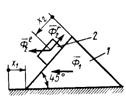
3.9.5. Определить обобщенную силу инерции, соответствующую обобщенной координате х 2 (рис. 571), если сила инерции тела 1 Ф = 5 Н, переносная и относи-тельная силы инерции тела 2 соответственно  = 1 Н,
= 1 Н,  = 8 Н. (-7,29)
= 8 Н. (-7,29)
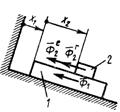
3.9.6. Определить обобщенную силу инерции, соот-ветствующую обобщенной координате х 1 (рис. 672), если сила инерции тела 1 Ф 1 = 5 Н, переносная и тносительная силы инерции тела 2 соответственно = 1 Н, = 8 Н. (-0,344)
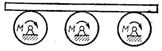
 3.9.7. Определить обобщенную силу инерции, соответствующую обобщенной координате х 2 (рис. 573), если сила инерции тела 1 Ф 1= 8 Н, переносная и относи-тельная силы инерции тела 2 соответственно = 5 Н, = 5 Н. (-10)
3.9.7. Определить обобщенную силу инерции, соответствующую обобщенной координате х 2 (рис. 573), если сила инерции тела 1 Ф 1= 8 Н, переносная и относи-тельная силы инерции тела 2 соответственно = 5 Н, = 5 Н. (-10)
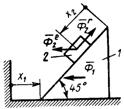
Рис. 571 Рис. 572 Рис. 573
|
|
3.9.8. Определить обобщенную силу инерции, соот-ветствующую обобщенной координате х 1 (рис. 574),если сила инерции тела 2 Ф 1 = 4 Н, переносная и относитель-ная силы инерции тела 2 соответственно =2 Н, =1 Н, переносная и относительная силы инерции тела 3
соответственно  = 2 Н,
= 2 Н,  = 1 Н (-9)
= 1 Н (-9)
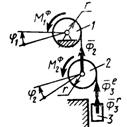
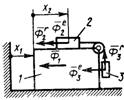
Рис. 574 Рис. 575
3.9.10. Определить обобщенную силу инерции, соответствующую обобщенной координате φ 1 (рис. 575), если сила инерции тела 2 Ф 2 = 0,4 Н, переносная и отно-сительная силы инерции тела 3 соответственно = 0,2Н = 0,1 Н, моменты сил инерции  = 0,4 Н м,
= 0,4 Н м,  = 0,1 Н·м, радиус r = 0,2 м (-0,54)
= 0,1 Н·м, радиус r = 0,2 м (-0,54)
|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!