

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Дифференциальное уравнение вращательного движе-ния твердого тела имеет вид
 .
.
Пример 1. Исследуем движение под действием силы тяжести физического маятника, т. е. твердого тела, имеющего горизонтальную ось вращения (ось подвеса), не проходящую через центр тяжести тела (рис. 453).
Решение. Составим дифференциальное уравнение враще-ния маятника вокруг его оси подвеса:
 = —Ph sin φ, или
= —Ph sin φ, или  .
.
Данное уравнение в элементарных функциях не интегри-руется. Для малых же углов отклонения sin φ ≈ φ, и тогда

 .
.
Это дифференциальное уравнение свободных гармонических колебаний с круговой частотой k =  и периодом
и периодом  .
.
Движение физического маятника
Рис. 453 при малых углах отклонения будет описываться зависимостью
φ = A sin (kt + α),
где постоянные А и α определяются начальными условиями.
Определим длину l математического маятника, имеющего тот же период колебаний, что и физический. Эту длину назы-вают приведенной длиной физического маятника. Как звестно, период малых колебаний математического маятника равен
Т = 2π  .
.
Поэтому l/g =Jя/(Ph). Отсюда получаем приведенную длину физического маятника
 ,
,
где М — масса физического маятника
Задачи
3.5.1. По заданному уравнению вращения φ = 5 t 2 - 2 пластинки, осевой момент инерции которой Jz = 0,125 кг·м2, определить главный момент внешних сил, действующих на пластинку. (1,25)
3.5.2. Вал двигателя вращается с угловой скоростью ω = 90 е -20 t + 85 (1 - е -20 t ). Определить главный момент внешних сил, действующих на вал, в момент времени
t = 0,1 с, если его момент инерции относительно оси вращения равен 1 кг·м2. (-13,5)
3.5.3. По заданному уравнению вращения φ = 2(t 2 + 1) наклонного стержня (рис. 454) с осевым моментом инерции Jz = 0,05 кг·м2 определить главный момент внешних сил, действующих на тело. (0,2)
|
|
 3.5.4. Диск (рис. 455) вращаетсявокруг оси Oz по закону φ = t 3. Определить модуль момента пары сил, приложенной к диску, в момент времени t = 1 с, если момент инерции диска относительно оси вращения равен 2 кг·м2. (12)
3.5.4. Диск (рис. 455) вращаетсявокруг оси Oz по закону φ = t 3. Определить модуль момента пары сил, приложенной к диску, в момент времени t = 1 с, если момент инерции диска относительно оси вращения равен 2 кг·м2. (12)


Рис. 454 Рис. 455 Рис. 456
3.5.5. По заданному уравнению вращения φ = 3 t 2 - t стержня (рис. 456) с осевым моментом инерции Jz = 1/6 кг·м2 определить главный момент внешних сил, дейст-вующих на стержень. (1)
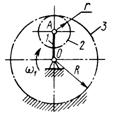
3.5.6. По заданному уравнению вращения φ = t 3 – 5 t 2однородного цилиндра (рис. 457) радиуса R = 1,41 м, мас-сой т = 60 кг определить главный момент внешних сил, действующих на тело, в момент времени t = 2 с. (119)
3.5.7. Конус (рис. 459), масса которого т = 10 кг, а радиус основания R = 1 м, вращается вокруг оси симмет-рии по закону φ = 4 sin 2 t. Определить главный момент приложенных к конусу внешних сил относительно оси вращения в момент времени t = π /4 с, если момент инерции конуса Jz = 0,3 mR 2. (- 48)
3.5.8. По заданному уравнению вращения φ = 2sin (πt/ 2) однородной прямоугольной плиты (рис. 459) с моментом инерции относительно оси вращения Jz = 10 кг·м2 определить главный момент внешних сил, действующих на тело, в момент времени t = 1 с. (- 49,3)



Рис. 457 Рис. 458 Рис. 459
3.5.9. Диск вращается вокруг центральной оси (рис. 460) с угловым ускорением ε = 4 рад/с2 под действием пары сил с моментом М 1 и момента сил сопротивления
М 2 = 6 Н·м. Определить модуль момента М 1 пары сил, если момент инерции диска относительно оси вращения равен 6 кг·м2. (30)



Рис. 460 Рис. 461 Рис. 462
3.5.10. Однородный стержень (рис. 461), масса кото-рого т = 2 кг и длина АВ = 1 м, вращается вокруг оси Oz под действием пары сил с моментом M 1и момента сил сопротивления M 2= 12 Н·м по закону φ = 3 t 2. Опреде-лить модуль момента M 1 приложенной пары сил в момент времени t = 1 с. (16)
 3.5.11. Определить угловое ускорение диска (рис. 462) радиуса r = 0,3 м массой т = 50 кг, если натяжения ведущей и ведомой ветвей ремня соответственно равны
3.5.11. Определить угловое ускорение диска (рис. 462) радиуса r = 0,3 м массой т = 50 кг, если натяжения ведущей и ведомой ветвей ремня соответственно равны
T 1 = 2 T 2 = 100 Н. Радиус инерции диска относительно оси вращения равен 0,2 м. (7,5)
|
|
3.5.12. Определить угловое ускоре-ние однородного тонкого диска (рис. 463) радиуса R = 0,6 м, массой 4 кг, вращающегося вокруг вертикальной оси Az под действием момента
Рис. 463 Мz = 1,8 Н·м. (5)
3.6. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Работа и мощность силы
Элементарную работу силы, приложенной к материальной точке, на бесконечно малом перемещении определяют формулой
 .
.
Работа силы на конечном перемещении материаль-ной точки
 .
.
Работа постоянной силы на прямолинейном участке пути s
 .
.
Работа силы тяжести любой системы
 ,
,
где Р – сила тяжести системы;  и
и  - координаты центра тяжести в начальном и конечном положениях системы.
- координаты центра тяжести в начальном и конечном положениях системы.
Работа упругой силы Fx = - cx при прямолинейном перемещении точки
 .
.
Элементарную работу сил, приложенных к твердому телу, перемещающемуся произвольно, определяют по формуле
 ,
,
где О – произвольная точка тела.
Работа сил, приложенных к твердому телу вращающемуся вокруг оси,
 ,
,
где Mz – главный момент всех сил относительно оси вращения Оz.
Сумма работ всех внутренних сил в твердом теле равна нулю.
Мощность силы, приложенной в точке,
 .
.
Мощность сил, приложенных к твердому телу,
 .
.
Для сил, приложенных к твердому телу, вращающе-муся вокруг неподвижной оси,
Р = Мzω.
Задачи
3.6.1. Ненагруженную пружину, коэффициент жест-кости которой с = 100 Н/м, растянули на 0,02 м. Опреде-лить работу силы упругости пружины. (-0,02)
3.6.2. На тело (рис. 464) действует постоянная по
направлению сила F = 4 х 3. Определить работу этой силы при перемещении тела из положения с координатой х = 0 в положение с координатой х = 1м. (0,866)
3.6.3. Материальная точка М массой m (рис. 465) движется прямолинейно по горизонтальной плоскости по закону s = t 4 под действием силы F = 12 t 2. Определить работу этой силы при перемещении ее точки
 приложения из начального положения, где s = 0, в положение, где s = 4 м. (64)
приложения из начального положения, где s = 0, в положение, где s = 4 м. (64)


Рис. 464 Рис. 465 Рис. 466
3.6.4. Моторная лодка движется по реке со скоростью 8 м/с. Сила тяги двигателя равна 3500 Н. Определить в кВт мощность силы тяги двигателя. (28)
3.6.5. Тело скользит вниз по шероховатой плоскости (рис.466). Зависит ли работа силы трения скольжения на расстоянии s от изменения угла наклона плоскости α? (Да)
3.6.6. Однородный цилиндр массой 40 кг катится прямолинейно без скольжения по горизонтальной плоскости с угловой скоростью ω= 4 рад/с. Коэффициент трения качения δ = 0,01 м. Определить мощность сил сопротивления качению.(-15,7)
|
|
Кинетическая энергия
Кинетическая энергия материальной точки  .
.
Кинетическая энергия системы п материальных точек  .
.
Кинетическая энергия твердого тела при поступа-тельном движении
 ,
,
где М =  - масса тела.
- масса тела.
Кинетическая энергия твердого тела при его вращательном движении
 ,
,
где Jz – момент инерции тела относительно оси вращения, ω – угловая скорость тела.
Для общего случая движения твердого тела (в том числе и для плоского движения)
 ,
,
где JC – момент инерции тела относительно мгновенной оси, проходящей через центр тяжести, ω – мгновенная угловая скорость.
Задачи
3.6.7. Частота вращения рабочего колеса вентилятора равна 90 об/мин. Определить кинетическую энергию колеса, если его момент инерции относительно оси вращения равен 2,2 кг·м2. (97,7)
 3.6.8. Для указанного положения механизма (рис. 467) определить кинетическую энергию шатуна АВ массой т = 1 кг, если кривошип ОА длиной 0,5 м вращается вокруг оси О с угловой скоростью ω = 2 рад/с. (0,5)
3.6.8. Для указанного положения механизма (рис. 467) определить кинетическую энергию шатуна АВ массой т = 1 кг, если кривошип ОА длиной 0,5 м вращается вокруг оси О с угловой скоростью ω = 2 рад/с. (0,5)


Рис. 467 Рис. 468 Рис. 469
3.6.9. Однородный диск (рис. 468) массой т = 30 кг радиуса R = 1 м начинает вращаться из состояния покоя равноускоренно с постоянным угловым ускорением
ε = 2 рад/с2. Определить кинетическую энергию диска в момент времени t = 2 с после начала движения. (120)
3.6.10. Однородный стержень (рис. 469), масса которого т = 3 кг и длина АВ = 1 м, вращается вокруг оси Oz по закону φ = 2 t 3. Определить кинетическую энергию стержня в момент времени t = 1 с. (18)
3.6.11. Однородная прямоугольная пластина (рис. 470) массой т = 18 кг вращается вокруг оси АВ с
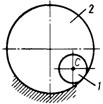


Рис. 470 Рис. 471 Рис. 472
угловой скоростью ω = 4 рад/с. Определить кинети-ческую энергию пластины, если длина b = 1 м. (48)
3.6.12. Диск массой т = 2 кг радиуса r = 1 м (рис. 471) катится по плоскости, его момент инерции относительно оси, проходящей через центр С перпен-дикулярно плоскости рисунка, JC = 2 кг·м2. Определить кинетическую энергию диска в момент времени, когда скорость его центра vC = 1 м/с. (2)
 3.6.13. Однородный цилиндр 1 (рис. 472) массой т = 16 кг катится без скольжения по внутренней цилиндрической поверхности 2. Определить кинетическую энергию цилиндра в момент времени, когда скорость его центра масс С равна 2 м/с. (48)
3.6.13. Однородный цилиндр 1 (рис. 472) массой т = 16 кг катится без скольжения по внутренней цилиндрической поверхности 2. Определить кинетическую энергию цилиндра в момент времени, когда скорость его центра масс С равна 2 м/с. (48)
|
|

Рис. 473 Рис. 474 Рис. 475
3.6.14. Однородный стержень АВ (рис. 473) длиной 2 м и массой т = 6 кг при своем движении скользит конца-ми А и В по горизонтальной и вертикальной плоскостям. Определить кинетическую энергию стержня в момент времени, когда угол α = 45° и скорость точки А равна vA = 1 м/с. (2)
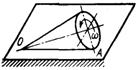
3.6.15. Прямой круговой конус (рис.474) катится без скольжения по горизонтальной плоскости, имея угловую скорость ω = 5 рад/с во вращательном движении вокруг мгновенной оси вращения. Момент инерции конуса относительно оси ОА равен 0,04 кг·м2. Определить кинетическую энергию конуса. (0,5)
3.6.16. Шар массой т = 5 кг свободно движется в пространстве (рис. 475); скорость vr центра С шара равна 4 м/с, а его угловая скорость  вращения вокруг мгно-венной оси Cz равна 10 рад/с. Определить кинетическую энергию шара, если его момент инерции относительно оси Cz равен 0,5 кг·м2. (65)
вращения вокруг мгно-венной оси Cz равна 10 рад/с. Определить кинетическую энергию шара, если его момент инерции относительно оси Cz равен 0,5 кг·м2. (65)
3.6.17. Чему равна кинетическая энергия зубчатой передачи двух цилиндрических колес с числом зубьев z 2 = 2 z 1, если их момент инерции относительно осей вращения J 2 = 2 J 1= 2 кг·м2, а угловая скорость колеса 1 равна 10 рад/с. (75)
 3.6.18. Четыре груза массой т = 1 кг каждый (рис. 476), соединенныегибкой нитью, переброшенной через неподвижный невесомый блок, движутся согласно закону s = 1,5 t2. Определить кинетическую энергию системы грузов в момент времени t = 2 с. (72)
3.6.18. Четыре груза массой т = 1 кг каждый (рис. 476), соединенныегибкой нитью, переброшенной через неподвижный невесомый блок, движутся согласно закону s = 1,5 t2. Определить кинетическую энергию системы грузов в момент времени t = 2 с. (72)


Рис. 476 Рис. 477 Рис. 478
3.6.19. Определить кинетическую энергию системы (рис. 477), состоящей из двух одинаковых зубчатых колес массой т = 1 кг каждый, вращающихся с угловой скоростью ω = 10 рад/с. Радиус инерции каждого колеса относительно оси вращения равен 0,2 м. (4)
3.6.20. Груз массой т = 4 кг, опускаясь вниз (рис. 478), приводит с помощью нити во вращение цилиндр радиуса R = 0,4 м. Момент инерции цилиндра относи-тельно оси вращения J = 0,2 кг·м2. Определить кинети-ческую энергию системы тел в момент времени, когда скорость груза v = 2 м/с. (10,5)
 3.6.21. Кривошип 1 (рис. 479), вращаясь с угловой скоростью ω = 10 рад/с, приводит в движение колесо 2 массой 1 кг, которое можно считать однородным диском. Момент инерции кривошипа относительно оси враще-ния равен 0,1 кг·м2. Определить кине-
3.6.21. Кривошип 1 (рис. 479), вращаясь с угловой скоростью ω = 10 рад/с, приводит в движение колесо 2 массой 1 кг, которое можно считать однородным диском. Момент инерции кривошипа относительно оси враще-ния равен 0,1 кг·м2. Определить кине-
Рис. 479 тическую энергию механизма, если
радиус R = 3 r = 0,6 м. (17)
3.6.3. Теорема об изменении кинетической энергии механической системы
С помощью теоремы об изменении кинетической энергии решается как прямая, так и обратная задачи динамики. В дифференциальной форме теорема применяется для того, чтобы найти по заданным силам ускорения точек системы (или наоборот), т. е. чтобы составить дифференциальные уравнения движения системы и интегрированием этих уравнений найти законы изменения скоростей и перемещений точек системы. Интегральная форма теоремы используется в тех случаях, когда при конечном перемещении системы заданы три из следующих четырех величин: скорости, перемещения, силы, массы, а четвертая подлежит определению. Теорема чаще всего применяется для исследования движения механических систем с одной степенью свободы, т. е. систем, положение которых определяется одной координатой (линейной или угловой). Поэтому мы будем рассматривать только такие системы.
|
|
При решении задач с использованием теоремы в дифференциальной форме рекомендуется следующий порядок действий.
1. Выбрать координату, определяющую положение системы. Как правило, это величина, закон изменения которой (или ее производной) требуется найти. Начало отсчета данной координаты выбирается или в начальном положении системы, или в положении ее статического равновесия. Определить начальные значения координаты и ее производной по времени. Если в задаче требуется найти только ускорение, то этот пункт становится излишним.
2. Изобразить систему в текущий момент временя, т. е. при t > 0, дав ей смещение в сторону возрастания выбранной координаты. Построить все приложенные к системе внешние и внутренние силы (в случае неизменяемой системы или системы твердых тел, соединенных идеальными связями, только внешние силы, так как в этом случае  = 0).
= 0).
3. Записать теорему об изменении кинетической энергии в дифференциальной форме:
dT/dt =  + .
+ .
4. Подсчитать кинетическую энергию в текущем положении системы, выразив ее как функцию скорости звена, движение которого требуется определить (или задано).
5. Подсчитать сумму мощностей внешних и внутренних сил (или сумму их элементарных работ), выразив ее как функцию скорости звена, движение которого определяется (или задано).
6. Подставить полученные значения кинетической энергии и суммы мощностей в уравнение теоремы, получив таким образом дифференциальное уравнение движения системы. Если решается прямая задача, то из данного уравнения найти искомую силу.
7. Проинтегрировать полученное уравнение, используя начальные условия, и найти искомые величины.
Пример 1. Груз А массой m 1 = 1,02 кг опускаетсяпо шероховатой наклонной плоскости (коэффициент трения k = 0,2), составляющей с горизонтом угол α = 45°. К грузу А прикреплена невесомая и нерастяжимая нить, перекинутая через блок В и намотанная на однородный круглый цилиндр D массой т 2 = 2,04 кг и радиусом r = 0,4 м, который катится по горизонтальной плоскости без скольжения (рис. 480, а). Масса блока т 3 = 0,51 кг, его радиус r 1= 0,1 м, а его радиус инерции относительно оси вращения ρ = 0,08 м. Нить по блоку В и цилиндру D не скользит; трением в оси блока и трением качения цилиндра о плоскость можно пренебречь. Найти угловое ускорение цилиндра D.
Рис. 480 
Решение. Поскольку требуется найти ускорение, для решения задачи применим теорему об изменении кинетической энергии в дифференциальной форме:

Изобразим систему вместе с действующими на нее внешними силами: активными ( ) и реакциями связей (
) и реакциями связей ( ). Внутренние силы не показываем, так как система состоит из твердых тел, соединенных идеальной связью (гибкой нерастяжимой нитью), и поэтому = 0. Сила трения F 1 = fN 1. Чтобы найти нормальную реакцию N 1, рассмотрим движение груза А, освободив его от связей и заменив их реакциями
). Внутренние силы не показываем, так как система состоит из твердых тел, соединенных идеальной связью (гибкой нерастяжимой нитью), и поэтому = 0. Сила трения F 1 = fN 1. Чтобы найти нормальную реакцию N 1, рассмотрим движение груза А, освободив его от связей и заменив их реакциями  ; оси координат показаны на рис. 480, б. Груз совершает поступательное прямолинейное движение вдоль оси Ох, поэтому дифференциальное уравнение его движения в проекции на ось Оу дает
; оси координат показаны на рис. 480, б. Груз совершает поступательное прямолинейное движение вдоль оси Ох, поэтому дифференциальное уравнение его движения в проекции на ось Оу дает
 ,
,  = - P cos α + N 1
= - P cos α + N 1
откуда N 1 = P cos α. и, следовательно, F 1 = f P cos α.
Рассматриваемая система состоит из трех тел, А, В и D, так что ее кинетическая энергия состоит из трехслагаемых;
Т = ТА + ТВ + ТD.
/ r 1. Тело А совершает поступательное движение, поэтому
 ;
;
блок В вращается вокруг неподвижной оси, поэтому
 ;
;
цилиндр D совершает плоскопараллельное движение, поэтому

Выразим скорости vA, ω1, vС через угловую скорость цилиндра ω, угловое ускорение которого требуется определить. Точка К цилиндра является его мгновенным центром скоростей, так что vC = ω 2 r, vE = ω 2 r 2. Нить нерастяжима, т. е. vE = vA и не скользит по блоку, т. е.
ω1 = vE/r 1 = 2 ω 2 r 2.
Выражение кинетической энергии системы принимает вид 
Определим мощность внешних сил, приложенных к системе (как было указано выше, мощность внутренних сил равна нулю);
= NP +  = PvA sin α – F 1 vA =
= PvA sin α – F 1 vA =
= m 1 g (sin α— f cos α) 2 ω 2 r 2.
Мощности нормальной реакции  и силы тяжести
и силы тяжести  равны нулю, так как эти силы перпендикулярны скоростям точек их приложения:
равны нулю, так как эти силы перпендикулярны скоростям точек их приложения:  ,
,  ; мощности реакции
; мощности реакции  и силы тяжести
и силы тяжести  равны нулю, так как эти силы приложены в неподвижной точке; мощности сил
равны нулю, так как эти силы приложены в неподвижной точке; мощности сил  и
и  равны нулю, так как они приложены в мгновенном центре скоростей.
равны нулю, так как они приложены в мгновенном центре скоростей.
Подставим полученные значения кинетической энергии и мощностей в формулу теоремы и определим искомое ускоре-ние 
или 
Сократив на 2 ω 2 r 2 и разделив обе части на коэффициент при ε 2 = dω2/dt, получим
 рад/с2.
рад/с2.
Пример 2. Груз А массой m 1 = 105 кг подвешен к подвижному однородному блоку В массой т 2 = 10 кг. Блок и груз удерживаются от падения тросом, конец К которого закреплен неподвижно, а конец D соединен с пружиной DE жесткостью
с = 1470 Н/м (рис. 481); трос по блоку не скользит. Найти период свободных колебаний системы, а так же закон движе-ния груза А,если в начальный момент система находится в положении статического равновесия и груз А имеет скорость v = 14 см/с, направленную вертикально вниз.
 Решение. Для определения движения груза А надо составить дифференциальное уравнение движения системы, и, следовательно, предпочтительнее воспользоваться теоремой об изменении кинетической энергии в дифференциальной форме:
Решение. Для определения движения груза А надо составить дифференциальное уравнение движения системы, и, следовательно, предпочтительнее воспользоваться теоремой об изменении кинетической энергии в дифференциальной форме:

Так как система состоит из твердых тел, соединенных идеальным шарниром М и нерастяжимым тросом, весом которого пренебрегают, сумма мощностей внутренних сил равна нулю:

Рис. 481 Положение системы определяется положением груза А, и, следовательно, положением точки М центра блока. Предполагая, что точка М движется только по вертикали, определим ее положение координатой х, отсчитываемой от статического положения центра диска (точка М ст).
К системе приложены внешние силы: силы тяжести  ,
,  и реакции связей
и реакции связей  . Упругая сила пружины равна F = сδ, где δ — деформация пружины, которую мы представим в виде суммы статической деформации δ ст и деформации хD, происходящей за счет смещения точки D при движении системы, так что F = с (δст + хD). Когда система нахо-дится в положении статического равновесия, упругая сила пру-жины (F ст = сδ ст) удерживает в равновесии блок с грузом. Из соображений симметрии следует, что при этом
. Упругая сила пружины равна F = сδ, где δ — деформация пружины, которую мы представим в виде суммы статической деформации δ ст и деформации хD, происходящей за счет смещения точки D при движении системы, так что F = с (δст + хD). Когда система нахо-дится в положении статического равновесия, упругая сила пру-жины (F ст = сδ ст) удерживает в равновесии блок с грузом. Из соображений симметрии следует, что при этом
F cт = F 1ст = (G + Q)/2, или G + Q = 2 сδ ст
Наша система состоит из груза А, движущегося поступа-тельно, и блока В, совершающего плоскопараллельное движение, и поэтому ее кинетическая энергия равна
 .
.
Так как точка Р блока является его мгновенным центром скоростей, то ω = vМ/r. Кроме того, vA = vМ = v, а момент инерции круглого однородного блока относительно центральной оси равен J = m 2 r2/ 2, следовательно,
 .
.
Определим сумму мощностей внешних сил;
= NG + NQ + + NF = Gv + Qv – FvD.
Мощность реакции  равна нулю, так как эта сила приложена в мгновенном центре скоростей блока. Учитывая положение этой точки можно записать, что vD = 2 vM = 2 v. Но так как vD = dxD/dt, vM = dxld t, то dxD = 2 dx, откуда, интегрируя, находим xD = 2 x. Тогда
равна нулю, так как эта сила приложена в мгновенном центре скоростей блока. Учитывая положение этой точки можно записать, что vD = 2 vM = 2 v. Но так как vD = dxD/dt, vM = dxld t, то dxD = 2 dx, откуда, интегрируя, находим xD = 2 x. Тогда
= (G + Q) v - c (δ ст + хD)2 v = v (G + Q - 2 сδ ст - 4 cх) = - 4 cxv,
поскольку, как было установлено ранее, G + Q = 2 сδ ст.
Подставляя значения кинетической энергии и суммы мощностей в формулу теоремы, получим дифференциальное уравнение движения системы:
 .
.
Сократим на v, перенесем все члены в левую часть и разде-лим на коэффициент при ускорении dv/dt =  груза А; это даст
груза А; это даст
 .
.
Введем обозначение  (k = 7 рад/с) и получим дифференциальное уравнение свободных гармони-ческих колебаний c периодом Т = 2π /k = 0,9 с:
(k = 7 рад/с) и получим дифференциальное уравнение свободных гармони-ческих колебаний c периодом Т = 2π /k = 0,9 с:
+ k2x = 0,
решение которого имеет вид
х = С 1 cos kt + С2 sin kt,
где С 1 и С 2 найдем по начальным условиям (t = 0, x 0 = 0,  ), предварительно определив
), предварительно определив  :
:
= - C 1 k sin kt + C 2 k cos kt.
Тогда x 0 = 0 = C 1, v 0 = C 2 k, откуда C 1 = 0, С 2 = v 0 /k = 2 см, и окончательно уравнение движения груза А запишется в виде
х = 2 sin 7 t см..
При решении задач с помощью теоремы об изменении кинетической энергии в интегральной форме рекомендуется следующая последовательность действий.
1. Изобразить систему в начальном и конечном (или заданном) положении. Построить все приложенные к системе внешние и внутренние силы (в случае неизменяемой системы или системы, состоящей из твердых тел, соединенных идеальными связями,— только внешние силы, так как в этом случае 
2. Записать теорему об изменении кинетической энергии в интегральной форме: Т 1 – Т 0 =  .
.
3. Подсчитать кинетическую энергию системы в начальном и конечном положениях, выразив ее через скорость звена, движение которого требуется определить (или задано).
4. Подсчитать сумму работ внешних и внутренних сил на искомых (или заданных) перемещениях точек системы, выразив их через перемещение того звена, движение которого ищется (или задано).
5. Подставить полученные значения кинетической энергии и работ в формулу теоремы и найти искомую величину.
Пример 3. К барабану ворота радиусом r 1и массой т 1приложен постоянный вращающий момент М. К концу троса, намотанного на барабан, прикреплена ось С колеса, масса которого равна m 2. Колесо катится без скольжения вверх по наклонной плоскости, образующей угол α с горизонталью (рис. 482). Какую угловую скорость приобретет барабан, сделав п оборотов? Барабан и колесо считать однородными круглыми цилиндрами. В начальный момент система находилась в покое. Массой троса и трением в шарнирах пренебречь.
 Решение. Условием задачи заданы силы, действующие на систему (
Решение. Условием задачи заданы силы, действующие на систему ( ,
,  ), массы входящих в нее тел и конечное перемещение системы (угол поворота барабана φ = 2 πп), требуется же найти скорость в конце перемещения. Поэтому для решения задачи применим теорему об изменении кинетичес-кой энергии системы в интегральной форме:
), массы входящих в нее тел и конечное перемещение системы (угол поворота барабана φ = 2 πп), требуется же найти скорость в конце перемещения. Поэтому для решения задачи применим теорему об изменении кинетичес-кой энергии системы в интегральной форме:
Рис. 482 Т 1 – Т 0 = .
Изобразим систему в. начальном и конечном положениях вместе с приложенными к ней внешними силами  и моментом М. Внутренние силы не показываем, так как система состоит из твердых тел, соединенных идеальными связями и
и моментом М. Внутренние силы не показываем, так как система состоит из твердых тел, соединенных идеальными связями и  = 0. В начальном положении система неподвижна, следовательно, Т 0 = 0. После п поворотов барабана он приобрел угловую скорость ω 1и скорость центра колеса будет равна v 2 = ω 1 r 1, а угловая скорость колеса ω 2 = v 2/ r 1 = ω 1 r 1 /r 2, ибо точка контакта колеса с наклонной плоскостью является его мгновенным центром скоростей. Барабан вращается вокруг неподвижной оси О, а колесо совершает плоскопараллельное движение, и поэтому кинетическая энергия системы T 1 после п оборотов барабана равна
= 0. В начальном положении система неподвижна, следовательно, Т 0 = 0. После п поворотов барабана он приобрел угловую скорость ω 1и скорость центра колеса будет равна v 2 = ω 1 r 1, а угловая скорость колеса ω 2 = v 2/ r 1 = ω 1 r 1 /r 2, ибо точка контакта колеса с наклонной плоскостью является его мгновенным центром скоростей. Барабан вращается вокруг неподвижной оси О, а колесо совершает плоскопараллельное движение, и поэтому кинетическая энергия системы T 1 после п оборотов барабана равна
 .
.
По условию задачи моменты инерции барабана и колеса равны соответственно  и
и  ,поэтому
,поэтому
 .
.
При повороте барабана па угол φ = 2 πn центр колеса переместится вдоль наклонной плоскости на расстояние
l = φr 1 = 2 πпr 1, т, е. поднимется на высоту h = l sin α =
= 2 πnr 1sin α. Определим работу внешних сил на этом конечном перемещении:
 .
.
Работы сил  и равны нулю, так как они приложены в неподвижной точке О. Работы сил
и равны нулю, так как они приложены в неподвижной точке О. Работы сил  и
и  равны нулю, так как они приложены в мгновенном центре скоростей колеса.
равны нулю, так как они приложены в мгновенном центре скоростей колеса.
Подставим полученные значения Т и  в формулу теоремы:
в формулу теоремы:

и определим ω 1: 
Задачи
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!