Для равновесия механической системы с идеальными голономными стационарными неосвобождающими связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на систему активных сил на любом возможном перемещении системы из предполагаемого положения равновесия равнялась нулю.
 .
.
Задачи с использованием принципа возможных перемещений рекомендуется решать в следующей последовательности:
1) построить схему механической системы с приложенными к ней внешними активными силами (при наличии неидеальных связей их отбросить и заменить соответствующими реакциями);
2) при необходимости определить реакцию связи мысленно отбросить связи и заменить ее реакцией;
3) определить независимые возможные перемещения точек системы (их число равно числу степеней свободы системы);
4) дать системе возможное перемещение, соответствующее одной из степеней свободы, считая при этом возможные перемещения, соответствующие остальным степеням свободы, равными нулю; выразить возможные перемещения точек приложения сил через это возможное перемещение;
5) вычислить сумму работ всех сил, указанных в пп. 1) и 2), на соответствующих возможных перемещениях их точек приложения и приравнять эту сумму нулю;
6) последовательно производя выкладки пп. 2) и 5) для каждого из независимых возможных перемещений, составить систему уравнений равновесия в числе, равном числу степеней свободы системы;
7) решив полученную систему уравнений, найти искомые величины.
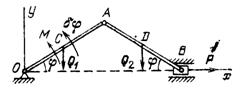 Пример 1. На кривошип ОА кривошипно-ползунного механизма, расположенного в вертикальной плоскости (рис. 556), действует пара сил с моментом М. Кривошип и шатун равной длины ОА = АВ = l представляют собой однородные стержни весом Q 1 и Q 2 соответственно, вес ползуна В равен Q3, положение механизма задано на чертеже. Пренебрегая трением, найти горизонтальную силу Р, приложенную к ползуну и удерживающую механизм в равновесии.
Пример 1. На кривошип ОА кривошипно-ползунного механизма, расположенного в вертикальной плоскости (рис. 556), действует пара сил с моментом М. Кривошип и шатун равной длины ОА = АВ = l представляют собой однородные стержни весом Q 1 и Q 2 соответственно, вес ползуна В равен Q3, положение механизма задано на чертеже. Пренебрегая трением, найти горизонтальную силу Р, приложенную к ползуну и удерживающую механизм в равновесии.
Решение. К системе приложены активные силы
 и момент M.
и момент M.
Рис. 556 Положение механизма определяется углом φ, т. е. система имеет одну степень свобо-ды и мы можем ей дать одно независимое возможное переме-щение, увеличив угол φ на величину δφ. В силу принципа возможных перемещений

Так как Q 1x = 0, Q 1 y = - Q 1, Q 2 x = 0, Q2y = - Q 2, Px = Р, Ру = 0, δуB = 0, Q 3 х = 0, то

Найдем соотношение между проекциями возможных перемещений различных точек и δφ. Из схемы видно, что
yC = уD = (l/ 2) sin φ, хB = 2 l cos φ.
Дифференцируя эти соотношения, находим
δуC = δуD = (l/2) cos φδφ, δхB = - 2 l sin φδφ.
Подставим полученные значения в исходное уравнение:
Mδφ – (Q 1 +Q 2)(l/2) cos φδφ - 2P l sin φδφ = 0.
В записанных ниже выражениях символ δ (вместо d) означает, что получаются возможные, а не действительные перемещения. Строго говоря, здесь производится операция не дифференцирования, а варьирования, т. е. дифференцирования при фиксированном времени. Откуда
 .
.
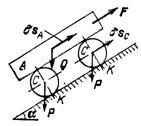 Пример 2. Вес бревна А (рис. 557) равен Q, вес каждого из цилиндрических катков, на которые оно положено, равен Р. Катки катятся по наклонной плоскос-ти (угол α задан) без скольжения, бревно по каткам не скользит. Какую силу
Пример 2. Вес бревна А (рис. 557) равен Q, вес каждого из цилиндрических катков, на которые оно положено, равен Р. Катки катятся по наклонной плоскос-ти (угол α задан) без скольжения, бревно по каткам не скользит. Какую силу  , параллельную линии наибольшего ската, надо приложить к бревну, чтобы удержать его в равновесии?
, параллельную линии наибольшего ската, надо приложить к бревну, чтобы удержать его в равновесии?
Решение. Так как скольжение от-
Рис. 557 сутствует, связи, наложенные на систе-му, являются идеальными. Сообщив системе возможное пере-мещение δsA и вычислив возможные работы приложенных к сист FδsA еме активных сил ( ), получим
), получим
FδsA – Q sin α δsA – 2 P sin α δsC = 0
Так как точка К является мгновенным центром скоростей катков, то δsA = 2δ sC, откуда
2 FδsC – 2 Q sin α δsC – 2 P sin α δsC = 0
или F = (P + Q) sin α.
Задачи






