Центр масс любой системы движется так, как двигалась бы материальная точка, имеющая массу, равную массе всей системы, если бы на нее действовала сила, равная главному вектору всех внешних сил, приложенных к данной системе.
При решении задач с использованием теоремы о движении центра масс рекомендуется следующая последовательность действий.
1. Провести оси координат, выбрав их начало в положении, которое занимал центр масс системы или центр масс основной ее части в начальный момент времени или в положении статического равновесия этих точек. Оси координат направить в сторону предполагаемого движения системы. Если внешние силы, действующие на систему, параллельны, то одна из осей проводится перпендикулярно им.
2. Изобразить систему в смещенном в сторону положительных направлений осей
3. Изобразить на рисунке приложенные к системе внешние силы. координат положении.
4. Записать формулы теоремы о движении центра масс в проекциях на выбранные оси координат:
 .
.
5. Определить для смещенного положения системы координаты ее центра масс
 ,
,
и, дважды их продифференцировав, получить зависимости
 .
.
6. Подставив полученные выражения в формулы теоремы (п. 4), определить неизвестные силы или получить дифференциальные уравнения движения интересующей нас части системы.
7. Проинтегрировать дифференциальные уравнения п. 4 или п. 6 и найти закон движения центра масс или отдельных ее частей.
8. Если при составлении уравнений теоремы (п. 4), выяснится, что выполняется закон сохранения движения центра масс и, кроме того, начальная скорость центра масс по условиям задачи равна нулю, то решение сводится к определению координат центра масс системы в начальный и текущий (или заданный) моменты времени и приравниванию полученных выражений друг другу.
Пример 1. Корпус кривошипно-ползунного механизма свободно установлен на гладком основании (рис. 377). Масса корпуса m 1, кривошипа ОА т 2, шатуна AВ т 3, ползуна В т 4 длины ОА = АВ = l. Найти перемещение корпуса механизма в зависимости от угла поворота кривошипа, если в начальный момент система неподвижна, φ 0 = 0, а кривошип приводится в движение за счет внутренних сил.
 Решение: Так как основное тело (корпус) совершает поступательное движение, то для решения задачи применим теорему o движении центра масс. Все внешние силы - веса частей механизма и реакция плоскости - вертикальны, поэтому проведем ось х горизонтально и выберем начало отсчета координаты х, определяющей положение шарнира О, т. е. корпуса механизма, в его начальном положений.
Решение: Так как основное тело (корпус) совершает поступательное движение, то для решения задачи применим теорему o движении центра масс. Все внешние силы - веса частей механизма и реакция плоскости - вертикальны, поэтому проведем ось х горизонтально и выберем начало отсчета координаты х, определяющей положение шарнира О, т. е. корпуса механизма, в его начальном положений.
Рис. 377
Изобразим систему в положении, смещенном относительно начального. К ней приложены внешние силы: силы тяжести
 ,
,  ,
,  и реакция
и реакция  . Запишем теорему в проекции на ось х:
. Запишем теорему в проекции на ось х:
 ,
,
так как все силы вертикальны. Следовательно, выполняется закон сохранения движения центра масс в проекциях на данную ось, и
 .
.
По условию, в начальный момент система неподвижна, поэтому
 и
и 
и в процессе движения системы положение центра масс остается неизменным:
хС = хС0.
Задача свелась к определению координат центра масс в начальном и текущем положениях системы и приравниванию их друг другу. Если φ ≠ 0, то
 ,
,
где х 1 = х + а, х 2 = х + (l/ 2) cos φ, х 3 = х + (3 l/ 2) cos φ,
х 4 = х + 2 l cos φ,
В начальный момент φ = 0, x 0 = 0 и
Из равенства хС = хС 0находим

или

 ,
,
т. е. при равномерном вращении кривошипа корпус будет совершать гармонические колебания.
Пример 2. По стержню А В массой т 1= 0,8 кг, подвешенному на пружине АЕ жесткостью с = 196 Н/м, движется ползун D массой m 2 = 0,2 кг (рис. 378); закон относительного движения ползуна s = l (1+ sin pt), где l = 4 см, р = 10 рад/с. Найти вынужденные колебания стержня.
Решение. Выберем начало координат в
Рис. 378 положении, которое занимает точка А стержня в положении статического равновесия. В этом положении упругая сила пружины, равная сδст, уравновешивает силы тяжести Р = m 1 g и Q = m 2 g. Поместим систему в промежуточном положении, приложим к ней внешние силы и составим уравнение теоремы о движении центра масс в проекции на ось х.
= Р + Q –c (δст + x)= (а)
= P + Q - cδст - сх = - сх.
Определим для данного положения координату центра масс:
 ,
,
откуда
 .
.
Подставив выражение для  в формулу (а), получим дифференциальное уравнение движения стержня
в формулу (а), получим дифференциальное уравнение движения стержня
 ,
,
или
 .
.
Введем обозначения:  ,
,  . Тогда
. Тогда
 ,
,
где k = 14 рад/с, h = 80 см/с2. Так как k ≠ р, то уравнение вынужденных колебаний, определяемых частным решением дифференциального уравнения, запишется в виде
 см.
см.
В рассмотренной задаче вынужденные колебания возникают за счет кинематического возбуждения.
Задачи
 3.2.1*. Корпус кривошипно-ползунного механизма укреплен на гладком основании с помощью болтов (рис. 379). Кривошип вращается с постоянной угловой скоростью ω. Найти силу давления корпуса на основа-ние, а также горизонтальное усилие, воспринимаемое болта-ми при работе механизма, если ОА = АВ = l = 0,5м, масса кривошипа т 1 = 1 кг, масса шатуна m 2 = 1 кг, масса ползуна т 3 = 2 кг, масса корпуса m 4 = 5 кг, ω = 14 рад/с.
3.2.1*. Корпус кривошипно-ползунного механизма укреплен на гладком основании с помощью болтов (рис. 379). Кривошип вращается с постоянной угловой скоростью ω. Найти силу давления корпуса на основа-ние, а также горизонтальное усилие, воспринимаемое болта-ми при работе механизма, если ОА = АВ = l = 0,5м, масса кривошипа т 1 = 1 кг, масса шатуна m 2 = 1 кг, масса ползуна т 3 = 2 кг, масса корпуса m 4 = 5 кг, ω = 14 рад/с.
Ответ: N = 88,2 - 588 cos 14 t H,
Рис. 379 R = 98 sin 14 t H.
3.2.2. Положение центра масс С механической системы массой т = 50 кг определяется радиус-вектором  . Определить статический момент масс этой системы относительно плоскости Оху. (250)
. Определить статический момент масс этой системы относительно плоскости Оху. (250)
3.2.3. Определить координату хС центра масс кривошипно-ползунного механизма (рис. 380) при углах φ = 90° и α = 30°, если масса кривошипа 1 равна 4 кг, а масса шатуна 2 равна 8 кг. Шатун 2 длиной 0,8 м считать однородным стержнем. Массой ползуна 3 пренебречь.(0,231)
 3.2.4. Тело массой т = 2 кг движется по горизонтальным направляющим (рис. 381) согласно закону s = 2 t 2 + 1. Определить модуль главного вектора внешних сил, действующих на тело. (8)
3.2.4. Тело массой т = 2 кг движется по горизонтальным направляющим (рис. 381) согласно закону s = 2 t 2 + 1. Определить модуль главного вектора внешних сил, действующих на тело. (8)


Рис. 380 Рис. 381 Рис. 382
3.2.5. Тело 1 массой т = 50 кг поднимается по наклонной плоскости с помощью троса (рис. 382), наматываемого на барабан 2 радиуса R = 0,4 м. Определить модуль главного вектора внешних сил, действующих на тело 1, если угловое ускорение барабана ε = 5 рад/с2. (100)
3.2.6. Механическая система (рис. 383) движетсятак, что проекции ускорения ее центра масс С на оси координат равны аС х = 1 м/с2, аСу = 2 м/с2, аСz = 4 м/с2. Определить модуль главного вектора внешних сил, действующих на систему, если масса системы т = 40кг. (183)
3.2.7. Движение центра масс механической системы определяется радиус-вектором  (рис. 384). Определить проекцию на ось Оу главного вектора внешних сил в момент времени t = 0,5 с, если масса системы m = 10 кг. (-197)
(рис. 384). Определить проекцию на ось Оу главного вектора внешних сил в момент времени t = 0,5 с, если масса системы m = 10 кг. (-197)



Рис. 383 Рис. 384 Рис. 385
3.2.8. Диск массой т = 20 кг вращается равномерно вокруг неподвижной оси с угловой скоростью ω = 10 рад/с (рис. 385). Определить модуль главного вектора внешних сил, приложенных к диску, если его центр тяжести удален от оси вращения на расстояние ОС = 0,5 см. (10)
3.2.9. Центр масс колеса С (рис. 386) движется по окружности радиуса R = 1,3 м согласно закону s = 4 t. Определить модуль главного вектора внешних сил, приложенных к колесу, если его масса т = 15 кг. (185)

 3.2.10. Кривошип 1 шарнирного параллелограмма (рис. 387) вращается равномерно с угловой скоростью ω = 5 рад/с. Определить модуль главного вектора внешних сил, действующих на звено 2, если его масса т = 8кг, длина ОА = 0,4 м. (80)
3.2.10. Кривошип 1 шарнирного параллелограмма (рис. 387) вращается равномерно с угловой скоростью ω = 5 рад/с. Определить модуль главного вектора внешних сил, действующих на звено 2, если его масса т = 8кг, длина ОА = 0,4 м. (80)
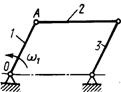
Рис. 386 Рис. 387 Рис. 388
3.2.11. Однородный равносторонний треугольник ОАВ массой т = 5 кг (рис. 388) вращается равномерно вокруг неподвижной оси. Определить его угловую скорость ω, если главный вектор внешних сил, действующих на него, равен 300 Н, а длина l =0,4м. (16,1)
3.2.12. Шкив 2 (рис. 389)радиуса R = 0,2 м, вращаясь с угловым ускорением ε2 = 10 рад/с2, поднимает однород-ный цилиндр 1, масса которого т = 50 кг. Определить модуль главного вектора внешних сил, действующих на цилиндр. (50)
3.2.13. Однородный диск радиуса (рис. 390) R = 0,5 м, масса которого т = 20 кг, вращается с постоянным угловым ускорением ε = 10 рад/с2. Определить модуль главного вектора внешних сил, действующих на диск. (0)



Рис. 389 Рис. 390 Рис. 391
3.2.14. Однородный стержень ОА (рис. 391) массой т = 10 кг вращается равномерно с угловой скоростью ω = 10 рад/с. Определить модуль главного вектора внешних сил, действующих на стержень, если его длина ОА = 1 м. (500)
3.2.15. Ползун А (рис. 392) движется под действием силы  с постоянной скоростью
с постоянной скоростью  . Определить реакцию направляющей на ползун А в тот момент времени, когда ускорение ползуна В равно аB = 4 м/с2, если масса однородного стержня АВ равна 5 кг. Массой ползунов пренебречь. (10)
. Определить реакцию направляющей на ползун А в тот момент времени, когда ускорение ползуна В равно аB = 4 м/с2, если масса однородного стержня АВ равна 5 кг. Массой ползунов пренебречь. (10)
3.2.16. Кривошип 1 (рис. 393) длиной ОА = 0,25 м, вращаясь равномерно с угловой скоростью ω = 10 рад/с, приводит в движение кулису 2, масса которой т = 5 кг. Определить модуль главного вектора внешних сил, действующих на кулису в момент времени; когда угол φ = 60°. (62,5)


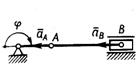
Рис. 392 Рис. 393 Рис. 394
3.2.17. Определить модуль главного вектора внешних сил, действующих на шатун АВ кривошипно-ползунного механизма (рис. 394) в момент времени, когда угол φ = 180°, а точки А и В имеют ускорения аA = 10 м/с2, aB = 14 м/с2. Шатун массой т = 5 кг считать однородным стержнем. (60)
3.2.18. Определить проекцию ускорения центра масс С механической системы (рис. 395) на ось Оу в момент времени, когда координата уC = 0,8 м, если масса системы т = 10 кг, а главный вектор приложенных внешних сил  . В начальный момент времени центр масс системы находился в точке О в покое. (1,2)
. В начальный момент времени центр масс системы находился в точке О в покое. (1,2)
3.2.19. Тело 1 массой 4кг может двигаться по горизонтальной направляющей (рис. 396). На какое расстояние переместится тело 1, когда однородный стержень 2 массой 2 кг и длиной l = 0,6 м, опускаясь под действием силы тяжести, займет вертикальное положение. В начальный момент система находилась в покое. (0,1)
3.2.20. Тело 1 массой m = 0,7 кг (рис. 397) может двигаться по горизонтальной направляющей. Определить модуль ускорения тела 1 в момент времени t = 0,25 с, если относительно него под действием внутренних сил системы движется тело 2 массой т = 0,1 кг согласно 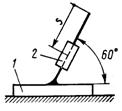

 уравнению s = sin 4 t. (0,841)
уравнению s = sin 4 t. (0,841)
Рис. 395 Рис. 396 Рис. 397
3.2.21. На тело 1 (рис. 398) действует постоянная сила F = 10 Н. Определить ускорение этого тела в момент времени t = 0,5 с, если относительно него под действием внутренних сил системы движется тело 2 согласно уравнению х = cos π t. Массы тел: m 1 = 4 кг, m 2 = 1 кг. Тела движутся поступательно. (2)


Рис. 398 Рис. 399
3.2.22. Определить ускорение тела 1 (рис. 399), скользящего по гладкой наклонной плоскости, если в горизонтальных направляющих относительно него под действием внутренних сил системы движется тело 2 согласно уравнению х = t 2. Массы тел: m 1 = m 2 = 1 кг. Тела движутся поступательно. (4,04)
3.3. ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КОЛИЧЕСТВА ДВИЖЕНИЯ
Производная по времени от количества движения системы материальных точек равна главному вектору внешних сил действующих на систему
 ,
,
или в дифференциальной форме: Дифференциал количества движения системы материальных точек равен векторной сумме элементарных импульсов действующих на систему внешних сил
 .
.
Решение задач с помощью теоремы об изменении количества движения по сравнению с решением задач с использованием дифференциальных уравнений движения системы упрощается, поскольку применение теоремы исключает необходимость рассмотрения внутренних сил системы. Решение оказывается особенно простым в том случае, когда выполняется закон сохранения количества движения.
Решение задачи с помощью теоремы обизменении количества движения рекомендуется проводить в следующей последовательности.
1. Изобразить систему в положении, которое она занимает в промежуточный момент времени (t > 0).
2. Изобразить на рисунке все приложенные к системе внешние силы (как активные, так и реакции связей).
3. Провести оси координат. Если на систему действуют только параллельные силы, то одна из осей проводится перпендикулярно направлению действия сил, в противном же случае оси проводятся наиболее естественным способом, вытекающим из условия задачи. Начало координат следует совместить с положением основного тела при t = 0 или с положением его статического равновесия.
4. Составить уравнения теоремы об изменении количества движения в проекциях на выбранные, оси координат в дифференциальной форме:
dQх/dt =  , dQy/dt=
, dQy/dt=  , dQz/dt =
, dQz/dt =  ,
,
или в интегральной форме:
 ,
,  ,
,  .
.
4. Изобразить на рисунке абсолютные и относительные скорости тел системы и подсчитать проекции количества движения системы на оси координат. Необходимо иметь в виду, что в выражения
 ,
,  ,
, 
входят абсолютные скорости. Если направление скорости какой-либо точки заранее неизвестно, то скорость направляют в сторону положительных направлений осей координат.
6. Подставив выражения проекций количества движения системы в формулы теоремы (п. 4), определить неизвестные силы пли получить дифференциальные уравнения движения интересующей нас части системы.
7. Проинтегрировать полученные дифференциальные уравнения и найти искомые неизвестные.
8. Если выполняется закон сохранения количества движения или какой-либо его проекции (т. е. если  = 0 или = 0 и, следовательно,
= 0 или = 0 и, следовательно,  = const =
= const =  или
или
Qx= const = Qx0), то задача сводится к определению количеств движения системы (или их проекции) в начальный и заданный (или текущий) моменты времени и приравниванию их друг другу
Пример 1. На железнодорожной платформе, свободно стоящей на рельсах, установлена лебедка А с барабаном радиусом r (рис. 400). Лебедка предназначена для перемещения по платформе груза B массой т 1. Масса платформы с лебедкой m 2. При включении лебедки барабан вращается по закону, ω = f (t) рад/с. В начальный момент система неподвижна. Пренебрегая трением, найти закон изменения скорости платформы после включения лебедки.
 Решение. Чтобы исключить неизвестные силы взаимодействия между лебедкой и платформой, лебедкой и грузом, грузом и платформой, рассмотрим платформу, лебедку и груз как единую механическую систему. Тогда все внешние силы, действующие на эту систему (силы тяжести
Решение. Чтобы исключить неизвестные силы взаимодействия между лебедкой и платформой, лебедкой и грузом, грузом и платформой, рассмотрим платформу, лебедку и груз как единую механическую систему. Тогда все внешние силы, действующие на эту систему (силы тяжести  ,
,  и реакции
и реакции  ,
,  ) будут вертикальными. Проведем ось х перпендикулярно им и запишем теорему об изменении количества движения системы в проекциях на эту ось:
) будут вертикальными. Проведем ось х перпендикулярно им и запишем теорему об изменении количества движения системы в проекциях на эту ось:
 .
.
Таким образом, мы имеем
Риc. 400 случай сохранения проекции
количества движения системы: Qx= const = Qx0, поскольку в начальный момент система неподвижна, Qx0 = 0, и решение задачи сводится к тому, чтобы найти количество движении в момент времени t > 0 и приравнять полученное выражение нулю. Обозначим скорость тележки через  и направим ее в сторону положительного направления оси х. Скорость груза В относительно платформы обозначим
и направим ее в сторону положительного направления оси х. Скорость груза В относительно платформы обозначим  ; при этом v 2 = ωr. Абсолютная скорость груза равна vB = v 1+ v 2 = v 1 + ωr. Тогда
; при этом v 2 = ωr. Абсолютная скорость груза равна vB = v 1+ v 2 = v 1 + ωr. Тогда
Qx = m 2 v 1+ (т 1 v 1 – ωr) = 0,
откуда
 .
.
Знак минус показывает, что платформа будет перемещаться в сторону, противоположную относительному движению груза.
Пример 2. Электрический мотор массой т 1 установлен без креплений на гладком горизонтальном фундаменте (рис. 401). На валу мотора под прямым углом закреплен одним концом невесомый стержень длиной l, на другой конец стержня насажен точечный груз А массой m 2. В момент включения мотора стержень занимает вертикальное положение. После включения мотора угловая скорость его вала постоянна и равна ω. найти:
 1) горизонтальное движение мотора; 2) силу давления мотора на фундамент.
1) горизонтальное движение мотора; 2) силу давления мотора на фундамент.
Решение. Изобразим мотор в положении φ = ωt > 0. К системеприложены внешние силы: силы тяжести , и реакция фундамента . Все они
Рис. 401вертикальны, поэтому ось х проведем горизонтально. Начало отсчета выберем в положении, которое занимает центр мотора при φ = 0, т. е. при t = 0. Запишем теорему в проекциях на оси координат:
dQх/dt = ,
следовательно, Qх = const = Qх0 = 0, так как до включения мотор и груз А были неподвижны; dQу/dt = = = N- Р - Q, откуда N = g (m1+ m2)+ dQy/dt. Таким образом, задача сводится к определению проекций количества движения системы. Пусть центр мотора движется вправо со скоростью vc, тогда
Qx = m 1 vc + m 2 vAx, Qу = m 2 vAy,,
где — абсолютная скорость груза А. Переносной скоростью груза является скорость мотора  , относительной — скорость при вращении груза А вокруг точки С: vr = ωl. Тогда vAx = vс – ωl cos ωt, vAу =- ωl sin ωt и, следовательно,
, относительной — скорость при вращении груза А вокруг точки С: vr = ωl. Тогда vAx = vс – ωl cos ωt, vAу =- ωl sin ωt и, следовательно,
Qx = (m1 + m2) vc - m2ωl cos ωt, Qy = - m2 ωl sin ωt.
Так как Qх = 0, получаем, что
откуда  + С. Из начальных условий (t = 0, хС = 0) находим С = 0 и окончательно
+ С. Из начальных условий (t = 0, хС = 0) находим С = 0 и окончательно
,
т. е. центр мотора будет совершать горизонтальные гармонические колебания относительно своего начального положения с амплитудой m 1 l/ (m 1 + т 2). Сила давления мотора на фундамент по величине равна реакции фундамента, действующей на мотор, поэтому
N = g (т 1+ m 2) +  = g (т 1 + т 2) - m 2 ω2l cos ωt).
= g (т 1 + т 2) - m 2 ω2l cos ωt).
Минимальное значение реакции достигается при cos ωt = 1, т. е. при φ = 0, а максимальное — при φ = π:
Nmin = g (m 1 — m 2) + т 2 ω 2 l, Nmax = g (m 1+ m 2) + m 2 ω 2 l.
Если Nmin < 0, то мотор начинает подпрыгивать на фундаменте. В этом случае его угловаяскорость
 .
.
Пример 3. Призма А массой т 1 лежит на гладкой наклон-ной плоскости. По ней движется тело В массой т 2 причем это относительное движение происходит по закону s = nt 2 / 2. В начальный момент тело А находится в покое. Определить зависимость скорости тела А от времени (рис. 402).
Решение. Система состоит из двух тел: А и В. На нее действуют следующие внешние силы: - сила тяжести тела А, - сила тяжести тела В, - реакция наклонной плоскости. Для решения задачи применим теорему об изменении количества движения системы в интегральной форме в проекциях на ось х:
 ,
,
 где Q0x — проекция количества движения системы в начальный момент времени, а Qx — та же проекция в произвольный момент времени t.
где Q0x — проекция количества движения системы в начальный момент времени, а Qx — та же проекция в произвольный момент времени t.
Определим количество движения системы в момент t:  , где
, где  - количество движения тела А,
- количество движения тела А,  — количество движения тела В, и
— количество движения тела В, и  — абсолютные скорости тел А и В.
— абсолютные скорости тел А и В.
Для тела В переносной
Рис.402 скоростью является скорость тела А ( ), а относительная скорость
), а относительная скорость  nt, следовательно,
nt, следовательно,
 .
.
Проекция количества движения системы на ось х равна
Qx = (m 1+ m 2) vA + m 2 nt cos β.
По условию при t = 0, va = 0, и поэтому Qх0 = 0. Определим проекции импульсов внешних сил на ось х за время t:
 ,
,
 ,
,
 , так как Nx= 0.
, так как Nx= 0.
Подставив найденные величины в формулу теоремы, получим
(m 1 + m 2) vА + т 2 пt cos β = g (m 1+ m 2) t sin α,
или
 .
.
Таким образом, скорость призмы А пропорциональна времени, а ее направление зависит от знака выражения, стоящего в скобках. Призма будет двигаться вверх по наклонной плоскости, если g sin α – т 2 п cos β/(m 1 + m 2) < 0, т. е. если относительное ускорение аr =  = п тела В превышает значение
= п тела В превышает значение
 .
.
Задачи





