 Рассмотрим плоскую систему сил (F 1, F 2,..., F n),действующих на твердое тело в координатной плоскости Oxy.
Рассмотрим плоскую систему сил (F 1, F 2,..., F n),действующих на твердое тело в координатной плоскости Oxy.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F 1 + F 2 +... + F n =  F i.
F i.
Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор L O, равный сумме векторных моментов этих сил относительно точки О:
L O = M O(F 1) + M O(F 2) +... + M O(F n) = M O(F i).
Вектор R не зависит от выбора центра О, а вектор L O при изменении положения центра О может в общем случае изменяться.
Для плоской системы сил вместо векторного главного момента используют понятие алгебраического главного момента. Алгебраическим главным моментом LO плоской системы сил относительно центра О, лежащего в плоскости действия сил, называют сумму алгебраических моментов этих сил относительно центра О.
Главный вектор и главный момент плоской системы сил обычно вычисляется аналитическими методами.
Главный вектор и главный момент плоской системы сил
В аналитическом методе для вычисления главного вектора и главного момента используются проекции сил Fix, Fiy и координаты xi, yi точек их приложения.
Модуль R главного вектора плоской системы сил и его направляющие косинусы ex, eу вычисляются по следующим формулам:
R = (Rх + Ry)  ; ex = Rx / R; ey = Rу / R; Rx = Fix; Ry = Fiy.
; ex = Rx / R; ey = Rу / R; Rx = Fix; Ry = Fiy.
Здесь в суммировании проекций можно не включать силы, образующие пары сил (F k, F 'k), F k = - F 'k, поскольку суммы проекций таких двух сил на любую ось равны нулю.
Алгебраический главный момент LO плоской системы сил относительно центра O (начала координатных осей) вычисляется по формуле:
LO = (xi Fiy - yi Fix) + Mk.
Здесь во вторую сумму выделены алгебраические моменты Mk пар сил (F k, F 'k).
В случаях, когда плечи hi всех сил определяются достатосно просто (например, если силы параллельны координатным осям Ox и Oy), величина LO может быть вычислена по формуле:
LO = ± Fi hi + Mk.
Лемма о параллельном переносе силы
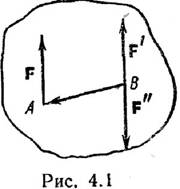
Докажем лемму: Сила, приложенная в какой-либо точке твердого тела, эквивалентна такой же силе, приложенной в любой другой точке этого тела, и паре сил, момент которой равен моменту данной силы относительно новой точки приложения. Пусть в точке А твердого тела приложена сила F (рис. 4.1). Приложим теперь в точке В тела систему двух сил F' и F²-, эквивалентную нулю, причем выбираем F'=F (следовательно, F"=–F). Тогда сила F~(F, F', F"), так как (F',F")~0. Но, с другой стороны, система сил (F, F', F") эквивалентна силе F' и паре сил (F, F"); следовательно, сила F эквивалентна силе F' и паре сил (F, F"). Момент пары (F, F") равен M=M(F,F")=BAxF, т.е. равен моменту силы F относительно точки В M=MB(F). Таким образом, лемма о параллельном переносе силы доказана.
Основная теорема статики
Пусть дана произвольная система сил (F1, F2,..., Fn). Сумму этих сил F=åFk называют главным вектором системы сил. Сумму моментов сил относительно какого-либо полюса называют главным моментом рассматриваемой системы сил относительно этого полюса.
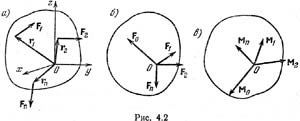
Оснтеор статики (теорема Пуансо): Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения. Пусть О — центр приведения, принимаемый за начало координат, r1,r2, r3,…, rn–соответствующие радиусы-векторы точек приложения сил F1, F2, F3,...,Fn, составляющих данную систему сил (рис. 4.2, а). Перенесем силы F1, Fa, F3,..., Fn в точку О. Сложим эти силы как сходящиеся; получим одну силу: Fо=F1+F2+…+Fn=åFk, которая равна главному вектору (рис. 4.2, б). Но при последовательном переносе сил F1, F2,..., Fn в точку О мы получаем каждый раз соответствующую пару сил (F1, F”1), (F2,F”2),...,(Fn, F"n).Моменты этих пар соответственно равны моментам данных сил относительно точки О: М1=М(F1,F”1)=r1 x F1=Мо(F1), М2=М(F2, F”2)=r2 x F2=Мо(F2), …, Мп=М(Fn, F"n)=rn x Fn=Мо(Fn). На основании правила приведения системы пар к простейшему виду все указанные пары можно заменить одной парой. Ее момент равен сумме моментов всех сил системы относительно точки О, т. е. равен главному моменту, так как согласно формулам (3.18) и (4.1) имеем (рис. 4.2, в) М0=М1+М2+...+Мn=Мо(F1)+Мо(F2)+…+ Мо(Fn)==åМо(Fk)=årk x Fk. Систему сил, как угодно расположенных в пространстве, можно в произвольно выбранном центре приведения заменить силой Fo=åFk (4.2) и парой сил с моментом M0=åM0(Fk)=årk x Fk. (4.3). В технике очень часто проще задать не силу или пару, а их моменты. Например, в характеристику электромотора входит не сила, с которой статор действует на ротор, а вращающий момент.








