

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Кривошипный механизм с прицепным шатуном (рисунок 14) представляет собой совокупность двух механизмов:
– обычного КШМ с главным шатуном АВ длиной L ш, опирающимся на кривошип ОВ радиусом R;
– механизма с прицепным шатуном А п В п, шарнирно соединенным в точке подвеса В п, с нижней головкой главного шатуна на расстоянии R п =ВВ пот центра шатунной шейки (R п — радиус подвеса) под углом λ 1к оси главного шатуна.
Очевидно, что механизм с главным шатуном кинематически тождествен обычному трехшарнирному КШМ, в то время как механизм с прицепным шатуном (МПШ) является механизмом четырехшарнирным, что предопределяет своеобразие его кинематики.
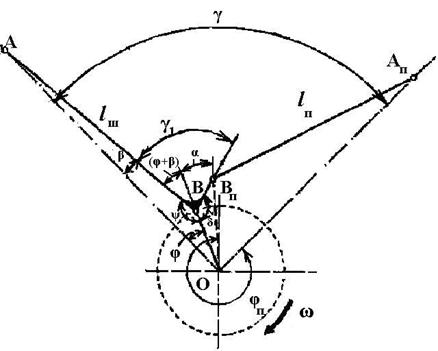
Рисунок 14 – Схема кривошипного механизма V-образного двигателя с
прицепным шатуном
Перемещение поршня в МПШ в принципе может быть описано тем же уравнением, что и в случае обычного КШМ. Если мысленно на отрезке ОВ празместить кривошип (штриховая линия на рисунке 14; в дальнейшем такой кривошип называется фиктивным), то смещение поршня
xп=ρ [1 - cos φп)+(λп/4) (1 - cos 2φп)], (158)
Здесь ρ = ОВ п— радиус «фиктивного» кривошипа;
φ п — угол поворота «фиктивного» кривошипа относительно ВМТ фиктивного» (ОВ п ) кривошипов;
λ п= ρ / l п;
l п = А п В п— длина прицепного шатуна.
Радиус «фиктивного» кривошипа может быть определен по формуле:
ρ =  (160)
(160)
Величина угла α определяется по теореме синусов из треугольника ОВВ п:
а = arcsin {(Rп /ρ) sin [γ1 – (φ+β)]}. (161)
Скорость и ускорение поршня в МПШ находятся по известным зависимостям:
vn= (Δ x п / Δ φ) ω и j п = (Δ v п /Δ φ) ω, (162)
где Δ x п и Δ v п— приращения соответственно перемещения и скорости поршня на угловом интервале Δ φ.
|
|
На рисунке 15 показана траектория точки подвеса В ппри повороте
кривошипа в пределах углов φ =0...360°. Здесь выделены два фиксированных положения механизма, соответствующие экстремальным значениям радиуса
«фиктивного» кривошипа:
 при (α+β)= γ 1 и α = 0°; (163)
при (α+β)= γ 1 и α = 0°; (163)
 при (α+β)= γ 1 -180° и α = 180°. (164)
при (α+β)= γ 1 -180° и α = 180°. (164)
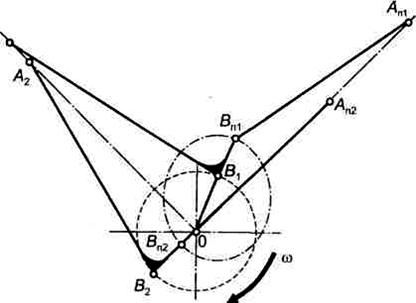
Рисунок 15 – Траектории точек подвеса главного и прицепного шатунов
Из приведенного рисунка следует, что траектория точек подвеса главного (окружность радиусом R с центром в точке О)и прицепного (эллипс, описываемый точкой Bп 1вращающегося относительно точки О «фиктивного» кривошипа) шатунов принципиально различны. Это обстоятельство предопределяет некоторые различия в кинематике поршней механизмов главного и прицепного шатунов, в частности небольшое различие в величинах их ходов S≠S п(обычно S<S п), что является причиной разных значений степени сжатия в цилиндрах правого и левого рядов.
Для минимизации этого различия соотношение величин углов γ и γ 1 должно выбираться таким, чтобы при нахождении поршня МПШ в ВМТ его ось и прямая ВВ п, соединяющая ось пальца прицепного шатуна с центром шатунной шейки, совпадали с осью цилиндра, как это показано на рисунке 16. Необходимое для выполнения данного условия соотношение конструктивных параметров механизма:
γ1= γ + arcsin (λ sin γ). (165)

Рисунок 16 – К определению рационального соотношения между углами у и у 1в механизме с прицепным шатуном
При практических расчетах с учетом того, что различие в кинематических параметрах поршней в механизмах с главными и прицепным шатунами невелико (обычно не превышает 10...15%), особенностями кинематики прицепных шатунов пренебрегают и считают все шатуны центральными.
|
|
|

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!