Фюзеляж вертолета. Фюзеляж вертолета является основным силовым корпусом вертолета и представляет собой цельнометаллический полумонокок переменного сечения с гладкой работающей обшивкой (рис.1.1.).

Рис.1.1. Фюзеляж вертолета
Фюзеляж имеет три конструктивных разъема и включает в себя:
- носовую часть;
- центральную часть;
- хвостовую балку;
- концевую балку с обтекателями.
Носовая часть фюзеляжа представляет собой самостоятельный отсек, в котором размещены кабина экипажа, органы управления вертолетом, приборное и другое оборудование.
В центральной части фюзеляжа расположена грузовая кабина.
Хвостовая балка – клееной конструкции, блочно-стрингерного типа, имеет форму усеченного конуса длиной 5440мм и состоит из каркаса и гладкой работающей обшивки. К хвостовой балке крепится стабилизатор и амортизатор хвостовой опоры.
Концевая балка предназначена для выноса оси вращения рулевого винта в плоскость вращения НВ. Ось килевой балки отклонена вверх на угол 430 10’, по отношению к оси хвостовой балки.
Стабилизатор. На вертолете установлен неуправляемый в полете стабилизатор, который служит для улучшения характеристик продольной устойчивости (рис.1.2.).

Рис.1.2. Стабилизатор
Основные геометрические данные:
- угол установки относительно оси хвостовой балки:
-60 - для вертолета МИ-8МТ;
-30 - для вертолета МИ-8МТВ-3;
- площадь стабилизатора – 2,0м2.
Стабилизатор имеет симметричный профиль и состоит из правой и левой половин трапециевидной формы в плане.
На режимах установившегося горизонтального полета углы атаки стабилизатора отрицательны и подъемная сила создает кабрирующий момент. Стабилизатор находится в пределах ометаемой площади, поэтому на висении в штиль и при малых скоростях он попадает в поле значительных индуктивных скоростей от НВ. При этом на стабилизаторе возникает направленная вниз сила, которая создает значительный кабрирующий момент.
Несущий винт. Несущий винт предназначен для создания подъемной силы, необходимой для осуществления вертикального набора высоты и поступательного полета вертолета.
Несущий винт состоит из пяти лопастей и втулки (рис.1.3.).

Рис.1.3. Несущий винт
Основные геометрические данные:
- диаметр винта – 21,3м;
- форма лопасти в плане – прямоугольная;
- хорда лопасти – 0,52м;
- ометаемая площадь – 356,1м2;
- коэффициент заполнения – 0,0777;
- коэффициент компенсатора взмаха – 0,5.
Основным силовым элементом лопасти является прессованный из алюминиевого сплава лонжерон, к полкам и задней стенке которого приклеиваются хвостовые отсеки с сотовым заполнителем.
Лопасть имеет геометрическую крутку +50 в сечениях 1-4 и далее изменяющуюся по линейному закону до 00 на конце лопасти (рис.1.4.). На отсеках 16 и 17 имеются триммерные пластины шириной 40мм, служащие для изменения моментных характеристик лопасти при устранении несоконусности несущего винта (рис.1.5.).

Рис.1.4. Геометрическая крутка лопасти

Рис.1.5. Лопасть несущего винта
Втулка несущего винта предназначена для передачи вращения лопастям от главного редуктора, а также для восприятия и передачи на фюзеляж аэродинамических сил, возникающих на несущем винте.
Схема втулки – пятилопастная, с разнесенными вертикальными, разнесенными и повернутыми горизонтальными и осевыми шарнирами (рис.1.6.).
Благодаря шарнирному сочленению лопастей с корпусом втулки значительно снижаются переменные напряжения на втулке и уменьшаются моменты аэродинамических сил, передающихся от винта на фюзеляж. Втулка снабжена гидравлическими демпферами для гашения колебаний лопастей относительно вертикальных шарниров и имеет компенсатор взмаха.

Рис.1.6. Втулка несущего винта
Рулевой винт - трехлопастной, карданного типа, тянущий, предназначен для уравновешивания реактивного момента несущего винта и для путевого управления вертолетом. Вращение винта осуществляется от главного редуктора через трансмиссию. Рулевой винт состоит из втулки и трех лопастей, и установлен на фланце выходного вала хвостового редуктора (рис.1.7.).

Рис.1.7. Рулевой винт
Направление вращения: по часовой стрелке, если смотреть со стороны рулевого винта. Изменение направления вращения рулевого винта (по сравнению с вертолетом Ми-8Т) привело к повышению эффективности путевого управления, особенно на режимах малых скоростей. Это связано с тем, что увеличилась скорость обтекания лопасти, что привело к уменьшению углов установки лопастей для создания равноценной тяги (рис.1.8.).

Рис.1.8. Треугольники скоростей лопасти РВ

Рис.1.9. Работа толкающего и тянущего РВ
Относительная потеря силы тяги РВ на обдувку киля определяется схемой РВ(толкающий или тянущий), расстоянием  между килем и РВ и обдуваемой площадью киля
между килем и РВ и обдуваемой площадью киля  , Если РВ тянущий, боковая сила киля создается от
, Если РВ тянущий, боковая сила киля создается от
непосредственной обдувки киля индуктивным потоком, отбрасываемым РВ. Если РВ толкающий, индуктивный поток отбрасывается в свободное воздушное пространство, но подсасывается из зоны расположения киля. Поэтому потери тяги толкающего РВ обусловлены, во-первых, силой разряжения на киле и прилегающей части хвостовой балки, а во-вторых, аэродинамическим затенением винта килем. Для любого типа РВ присутствие киля всегда вызывает потерю силы тяги, не компенсируемую незначительным экранным эффектом или оптимальным профилированием киля.
В конечном счете, потеря силы тяги РВ зависит от зазора между плоскостью вращения РВ и килем  , а также от значений обдуваемой площади киля
, а также от значений обдуваемой площади киля  (рис.1.10.). Для толкающего РВ величина
(рис.1.10.). Для толкающего РВ величина  по мере приближения РВ к килю возрастает значительно интенсивнее, чем для тянущего, однако в практической реализуемом диапазоне значений 0,3< <0,5 потери силы тяги толкающего РВ в несколько раз меньше, чем тянущего.
по мере приближения РВ к килю возрастает значительно интенсивнее, чем для тянущего, однако в практической реализуемом диапазоне значений 0,3< <0,5 потери силы тяги толкающего РВ в несколько раз меньше, чем тянущего.
При обычных параметрах киля и расположения РВ  для тянущего и
для тянущего и  для толкающего РВ.
для толкающего РВ.
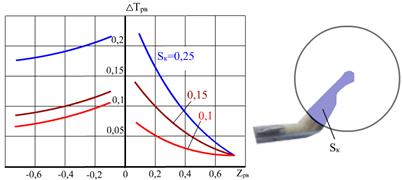
Рис.1.10. Зависимость потери тяги РВ от его относительного
расстояния до киля и обдуваемой площади киля 
Основные геометрические данные:
| №
| НАИМЕНОВАНИЕ
| МИ-8МТ
| МИ-8МТВ-3
|
| 1.
| Тип винта
| тянущий
| тянущий
|
| 2.
| Коэффициент заполнения
| 0,135
| 0,149
|
| 3.
| Хорда лопасти, мм
|
|
|
| 4.
| Диаметр винта, м
| 3,908
| 3,908
|
| 5.
| Углы установки:
- минимальный
- максимальный
- максимальный при полностью выдвинутом штоке МП-100 СПУУ-52-1
|
-7050'.+45'
20030'.+20'
16020'
|
-7020’
23020'
16020'
|
| 6.
| Максимальный угол установки лопастей НВ
| 140
| 14045’
|
В систему путевого управления включена система подвижных упоров управления СПУУ-52-1. Она предназначена для автоматического изменения положения упора, ограничивающего максимальную величину угла установки лопастей РВ в зависимости от плотности воздуха с целью предохранения винта и трансмиссии от перегрузки. При увеличении плотности воздуха максимальный угол установки лопастей РВ уменьшается, а при уменьшении плотности воздуха – увеличивается.
Взлетно-посадочные устройства. Взлетно-посадочные устройства предназначены для восприятия ударных нагрузок при посадке вертолета, а также для перемещения вертолета по земле при рулении и взлете. К взлетно-посадочным устройствам относятся (рис.1.11.):
- колесное шасси, не убирающееся в полете, оборудованное двумя главными стойками и передней стойкой с двумя спаренными колесами;
- хвостовая опора, предназначенная для предохранения лопастей РВ от повреждений при посадке вертолета с большим углом тангажа.

Рис.1.11. Взлетно-посадочные устройства вертолета
Основные геометрические данные:
- колея шасси – 4510мм;
- база шасси – 4280мм;
- клиренс – 0,445мм;
- стояночный угол – 4010’.






