При страгивании вертолета с места, при рулении, разбеге и пробеге, а также в момент отрыва на взлете и в момент касания земли на посадке могут создаваться такие условия, при которых вертолет получит тенденцию к опрокидыванию вбок относительно линии, проходящей через переднее колесо и одно из основных колес шасси.
На вертолет работающими двигателями на земле действует сила веса, тяга несущего винта, тяга рулевого винта и силы реакции земли, приложенные к колесам (рис.3.3.). Опрокидывающими силами являются силы тяги рулевого винта, боковые составляющие реакции земли, боковые силы, возникающие при развороте на рулении при неправильных действиях летчика, составляющая силы тяги несущего винта. Восстанавливающими силами являются вертикальные составляющие реакции земли и (при правильных действиях летчика) составляющая силы тяги несущего винта. С увеличением силы тяги несущего винта уменьшается вертикальная составляющая силы реакции земли и снижается ее стабилизирующее влияние. При боковом наклоне вертолета уменьшается плечо этой силы и также снижается ее стабилизирующее влияние.
Тенденции вертолета к опрокидыванию на земле способствуют: боковой ветер, малая жесткость шасси (слабая зарядка амортизатора), высокое положение центра тяжести. На скользкой поверхности (лед, мокрая трава и т.д.) при работе несущего винта возможно соскальзывание вертолета вбок. Опасность опрокидывания или соскальзывания вертолета увеличивается с увеличением тяги несущего винта.
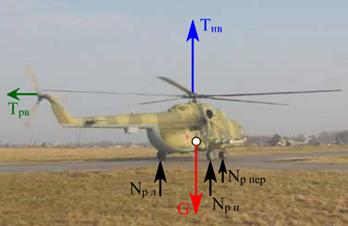
Рис.3.3. Силы, действующие на вертолет при движении
по земле
При взлетах и посадках на наклонной площадке предпочтительней располагать вертолет носом или хвостом на уклон, а при невозможности – левым бортом на уклон (правый борт ниже левого), поскольку под воздействием тяги рулевого винта опрокидывание влево более вероятно, чем опрокидывание вправо.
При взлете с площадки, имеющей уклон, увеличение общего шага на заключительном этапе до момента отрыва вертолета производить энергично, а при посадке – энергично уменьшать общий шаг несущего винта, чтобы минимальное время находиться в условиях слабоустойчивого равновесия вертолета. При внезапном увеличении крена на земле, т.е. в начале опрокидывания, летчик должен энергично сбросить шаг несущего винта или быстро отделить вертолет от земли.
ПРОДОЛЬНАЯ БАЛАНСИРОВКА
Условиями продольной балансировки является равенство нулю суммы моментов относительно связанной поперечной оси координат и равенство нулю сумм проекции сил на оси  и
и  скоростной системы координат.
скоростной системы координат.
Для горизонтального полета эти условия имеют такой вид:



При выполнении продольной балансировки в полете на заданной скорости летчик действует рычагом «ШАГ-ГАЗ» и продольным отклонением РУ. Рычагом «ШАГ-ГАЗ» устанавливается необходимая величина силы  (полной аэродинамической силы несущего винта), а продольным отклонением РУ – ее наклон (вперед или назад), необходимый для выполнения условий балансировки на заданном режиме полета. Однако наклоном силы только от РУ выполнить одновременно условия равновесия моментов и условия равновесия сил без изменения угла тангажа вертолета практически невозможно. Поэтому в процессе выполнения балансировки балансировочное отклонение РУ определяется выполнением условия равновесия моментов, а окончательное выполнение условия равновесия сил происходит путем соответствующего изменения угла тангажа вертолета.
(полной аэродинамической силы несущего винта), а продольным отклонением РУ – ее наклон (вперед или назад), необходимый для выполнения условий балансировки на заданном режиме полета. Однако наклоном силы только от РУ выполнить одновременно условия равновесия моментов и условия равновесия сил без изменения угла тангажа вертолета практически невозможно. Поэтому в процессе выполнения балансировки балансировочное отклонение РУ определяется выполнением условия равновесия моментов, а окончательное выполнение условия равновесия сил происходит путем соответствующего изменения угла тангажа вертолета.
При продольном отклонении РУ момент от силы  , равный
, равный  , меняется мало, поэтому можно считать, что выполнение условия равновесия моментов на заданном режиме полета происходит в основном за счет изменения момента (
, меняется мало, поэтому можно считать, что выполнение условия равновесия моментов на заданном режиме полета происходит в основном за счет изменения момента ( ).
).
На рисунках 3.4. и 3.5. приведены балансировочные кривые вертолета со спецфермами и без них.
Углы тангажа на графиках приведены относительно строительной горизонтали (пола кабины) вертолета, т.к. в полете летчик ощущает именно этот тангаж.
Наиболее существенно продольная балансировка зависит от скорости полета и продольной центровки.

Рис.3.4. Балансировочные кривые вертолета по скорости
горизонтального полета (со спецфермами)
Масса 13000кг., высота полета 1000м
На висении при отсутствии ветра продольное отклонение РУ и угол тангажа вертолета определяется в основном положением центра тяжести вертолета. При смещении центра тяжести вертолета вдоль продольной оси из заднего положения в переднее увеличивается пикирующий момент от силы , равный . Вертолет начинает опускать нос и перемещаться вперед, т.к. при опускании носа нарушается равновесие продольных сил
(увеличивается сила  ). В этом случае для балансировки вертолета РУ необходимо отклонить назад на такую величину, чтобы момент () уравновесил момент от смещения центровки , а изменение при этом угла тангажа на пикирование установило равновесие продольных сил. При попутном ветре отклонение РУ назад еще более увеличивается.
). В этом случае для балансировки вертолета РУ необходимо отклонить назад на такую величину, чтобы момент () уравновесил момент от смещения центровки , а изменение при этом угла тангажа на пикирование установило равновесие продольных сил. При попутном ветре отклонение РУ назад еще более увеличивается.

Рис.3.5. Балансировочные кривые вертолета по скорости
горизонтального полета
Масса 11100кг., высота полета 1000м
На вертолете Ми-8МТ изменение центровки на 100мм изменяет угол тангажа на 10 практически во всем диапазоне скоростей полета.
С изменением скорости полета наиболее существенное изменение продольной балансировки имеет место в диапазоне скоростей от висения до 70-80км/ч по прибору.
При увеличении скорости от висения до 30-35км/ч по прибору наблюдается резкое увеличение суммарного продольного момента вертолета на кабрирование, для балансировки вертолета необходимо существенно отклонять РУ вперед.
Максимальное балансировочное отклонение РУ вперед будет на скорости 40км/ч.
При дальнейшем увеличении скорости от40-45км/ч до 90-100км/ч величина кабрирующего момента уменьшается, для балансировки вертолета РУ необходимо отклонять назад.
В диапазоне скоростей 100-130км/ч балансировочное положение РУ практически не изменяется. При увеличении скорости более 120км/ч балансировочное отклонение РУ вперед увеличивается и достигает своего наибольшего значения на максимальной скорости.
Такой характер отклонения РУ по скорости определяется в основном изменением продольных моментов НВ и фюзеляжа с изменением скорости полета.
Если преобладает увеличение кабрирующих моментов, то балансировочное отклонение РУ вперед увеличивается, если их отношение не меняется, то не изменяется и отклонение РУ.
Угол тангажа вертолета определяется условием равновесия продольных сил и с увеличением скорости полета увеличивается на пикирование.
При переходе с одного режима к другому даже на одной скорости наблюдается разбалансировка вертолета в продольном направлении (рис.3.6.).
Наибольшая величина разбалансировки вертолета достигается при переходе с режима набора высоты на максимальной мощности двигателей к планированию на РСНВ.
При переходе с режима горизонтального полета в набор высоты на скорости 120км/ч требуется перемещение РУ на себя на величину  =20мм.
=20мм.
При переходе с режима горизонтального полета на РСНВ на скорости 140км/ч требуется отклонение РУ на себя примерно на 25мм.
Наличие груза на внешней подвеске практически не влияет на продольную балансировку вертолета на всех режимах полета.
Потребные углы общего шага у вертолета с увеличением скорости горизонтального полета от висения до 100км/ч уменьшаются и при дальнейшем увеличении скорости возрастают.
Запасы продольного управления имеют наименьшее значение при движении ручки от себя на режиме горизонтального полета с максимальной скоростью, предельно задней центровкой и при движении ручки на себя на режиме висения с предельно передней центровкой при ветре сзади допустимой величины и составляют около пятой части полного диапазона отклонения продольного управления в ту и другую сторону.

Рис.3.6.Балансировочные кривые вертолета по скорости
для различных режимов прямолинейного полета.
Масса 11100кг, центровка 100мм, высота полета 1000м
ПОПЕРЕЧНАЯ БАЛАНСИРОВКА
Условиями поперечной балансировки вертолета являются равенство нулю суммы моментов относительно связанной продольной оси  и равенство нулю суммы проекций сил на поперечную связанную ось координаты
и равенство нулю суммы проекций сил на поперечную связанную ось координаты  . Для горизонтального полета без крена условия поперечной балансировки имеют вид:
. Для горизонтального полета без крена условия поперечной балансировки имеют вид:


В связи с тем, что сила  расположена относительно центра тяжести на большем расстоянии, чем сила
расположена относительно центра тяжести на большем расстоянии, чем сила  , и при этом еще действует поперечный момент НВ
, и при этом еще действует поперечный момент НВ  , то выполнить одновременно условие равновесия моментов и равновесие сил отклонением РУ без создания крена или скольжения не удается.
, то выполнить одновременно условие равновесия моментов и равновесие сил отклонением РУ без создания крена или скольжения не удается.
Поэтому, выполняя поперечную балансировку, летчик поперечным отклонением РУ устанавливает такие величину и направление момента ( ), чтобы уравновесить поперечный момент от силы тяги РВ (
), чтобы уравновесить поперечный момент от силы тяги РВ ( ). При этом для выполнения условия равновесия поперечных сил он создает либо правый крен, либо левое скольжение. При левом скольжении создается боковая сила сопротивления
). При этом для выполнения условия равновесия поперечных сил он создает либо правый крен, либо левое скольжение. При левом скольжении создается боковая сила сопротивления  , а при правом крене – проекция силы веса
, а при правом крене – проекция силы веса  на ось , которые и выполняют условия равновесия поперечных сил.
на ось , которые и выполняют условия равновесия поперечных сил.
Изменение поперечной балансировки с ростом скорости полета оценивается по балансировочным отклонениям РУ (автомата перекоса) в поперечном направлении на различных скоростях установившегося режима полета (рис 3.4.,3.5.,3.6.).
На висении вертолет балансируется только с правым креном до 2-2,50, при отклоненной вправо РУ. Наличие бокового ветра на висении меняет потребное отклонение РУ: ветер слева уменьшает, а ветер справа увеличивает потребное отклонение РУ вправо.
С переходом от режима висения к поступательному полету вплоть до максимальных скоростей полета РУ для обеспечения поперечной балансировки вертолета необходимо отклонять влево.
Такой характер изменения поперечного отклонения РУ по скорости обусловлен тем, что с увеличением скорости полета вектор аэродинамической силы несущего винта отклоняется вправо и возникающий при этом поперечный момент () значительно больше, чем требуется для уравновешивания поперечного момента от силы тяги РВ.
В режиме набора высоты потребные отклонения РУ влево с ростом скорости полета практически такие же, как и в режиме горизонтального полета.
Максимальное отклонение РУ влево требуется при планировании на большой скорости на РСНВ.
Таким образом, минимальный запас отклонения РУ вправо будет на висении при допустимом ветре справа, а влево – на планировании в режиме РСНВ. Запасы управления в этих случаях достаточные.
Рассмотренные случаи поперечной балансировки относились к полету с симметричной поперечной центровкой.
При смещении центровки к правому борту ( ) отклонения РУ вправо будут уменьшаться, т.к. уравновешивание поперечного момента от тяги РВ в этом случае будет осуществлено также и за счет момента поперечной асимметрии. При этом величина силы уменьшается и для выполнения условия равновесия поперечных сил углы крена вправо или скольжения влево будут больше, чем в полете с симметричной поперечной загрузкой.
) отклонения РУ вправо будут уменьшаться, т.к. уравновешивание поперечного момента от тяги РВ в этом случае будет осуществлено также и за счет момента поперечной асимметрии. При этом величина силы уменьшается и для выполнения условия равновесия поперечных сил углы крена вправо или скольжения влево будут больше, чем в полете с симметричной поперечной загрузкой.
При смещении центра тяжести вертолета к левому борту, наоборот, отклонение РУ вправо увеличивается, а углы крена вправо или скольжения влево меньше.
В этом случае на отдельных режимах возможен прямолинейный полет вертолета без крена и скольжения.
Поэтому в случае невозможности симметричного расположения грузов в грузовой кабине рекомендуется располагать их в сторону левого борта в пределах установленного ограничения.
ПУТЕВАЯ БАЛАНСИРОВКА.
Путевая балансировка вертолета достигается при условии равенства нулю суммы моментов относительно связанной вертикальной оси координат  .
.
Для горизонтального полета условие путевой балансировки имеет вид:

Путевая балансировка выполняется изменением силы тяги РВ при отклонении педалей путевого управления. Величина балансировочного значения хода штока РВ, а соответственно и отклонение педалей путевого управления будут зависеть от тех же параметров и условий полета, от которых зависят значения  и .
и .
Наибольшая величина хода штока РВ, а следовательно, и правой педали вперед имеет место на режиме висения, где потребная мощность двигателей наибольшая.
С переходом к горизонтальному полету и с ростом скорости потребная мощность двигателей уменьшается примерно до скоростей 110-120км/ч, а с дальнейшим увеличением скорости горизонтального полета начинает возрастать. Примерно также изменяются с ростом скорости реактивный момент НВ и потребное отклонение педалей для путевой балансировки. Однако из-за увеличения эффективности РВ с увеличением скорости полета наименьшее потребное отклонение правой педали в горизонтальном полете наблюдается не на скоростях 110-120км/ч, а на скоростях 170-180км/ч. С дальнейшим увеличением скорости потребное отклонение правой педали вперед увеличивается (рис. 3.4.,3.5.,3.6.).
При наборе высоты потребные отклонения правой педали вперед больше, чем в горизонтальном полете на той же скорости, из-за большей потребной мощности.
На РСНВ за счет сил трения в редукторе и трансмиссии передается разворачивающий момент, действующий в направлении вращения НВ. Для обеспечения путевой балансировки вертолета на этом режиме требуется отклонение левой педали вперед.
Отклонение педалей в эксплуатационном диапазоне скоростей планирования на РСНВ практически не меняется. При переходе с режима горизонтального полета на режим набора высоты на скорости 120км/ч требуется отклонить правую педаль примерно на 25мм, а на РСНВ при 140км/ч – левую педаль вперед на 25мм от соответствующего балансировочного положения педалей в горизонтальном полете.
Изменение продольной центровки вертолета практически не оказывает влияния на путевую балансировку.
Минимальные запасы путевого управления имеют место на висении с максимальной взлетной массой и на РСНВ.






