ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА
ВЕРТОЛЕТА МИ-8МТ
Москва - 2006
ВВЕДЕНИЕ
Военно-транспортный вертолет Ми-8МТ с двумя турбовальными двигателями ТВ3-117МТ (ВМ) предназначен для перевозки людей и различных грузов в грузовой кабине, а также для транспортировки грузов на внешней подвеске.

Внешний вид вертолета
Вертолет Ми-8МТ применяется в следующих вариантах:
1. Транспортный:
- без дополнительных топливных баков (для перевозки в грузовой кабине грузов общим весом до 4000кг.);
- с одним дополнительным топливным баком;
- с двумя дополнительными топливными баками;
- для транспортировки грузов на внешней подвеске весом до 3000кг.
2. Десантный - для перевозки десантников с личным оружием (24 десантника на МТ, 30 десантников на МТВ-3).
3. Санитарный:
- с носилочными ранеными (максимально 12 чел) в сопровождении медработника;
- комбинированный (максимально 12 чел.-3 носилочных и 17 сидячих раненых или 15 сидячих раненых и один дополнительный топливный бак).
4. С оборудованием ВМР-2.
5. Боевой.
6. Специальный.
7. Перегоночный.
АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА
ВЕРТОЛЕТА. ОСНОВНЫЕ ТАКТИКО-
ТЕХНИЧЕСКИЕ ДАННЫЕ
ПОНЯТИЕ «АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА»
Под аэродинамической компоновкой летательного аппарата понимают внешние формы и способы сочетания его частей, создающих в полете основные аэродинамические силы и моменты.
Применительно к вертолетам аэродинамическая компоновка характеризуется:
- количеством и расположением несущих винтов;
- формами (обводами) фюзеляжа;
- типом и расположением силовой установки;
- наличием, расположением и формами крыла и оперения;
- количеством и формами выступающих в поток элементов.
Главным и в значительной мере определяющим признаком аэродинамической компоновки вертолета является количество несущих винтов и их расположение.
Военно-транспортный вертолет Ми-8МТ, спроектирован и построен по одновинтовой схеме с рулевым винтом и является дальнейшим развитием вертолета Ми-8.
ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ
ДАННЫЕ
| №
| НАИМЕНОВАНИЕ
| МИ-8МТ
| МИ-8МТВ
|
|
|
|
|
|
|
| Масса пустого вертолета, кг
| по формуляру
| по формуляру
|
|
| Нормальная взлетная масса, кг
|
|
|
|
| Максимальная взлетная масса кг
|
|
|
|
| Десантная нагрузка, кг:
- нормальная
- максимальная
|
|
|
|
| Количество десантников, чел
| 21-24
|
|
|
| Количество раненых, перевозимых на носилках, чел
|
|
|
|
| Максимальная скорость горизонтального полета на  =0-1000м, км/ч:
- при нормальной взлетной массе;
- при максимальной взлетной массе. =0-1000м, км/ч:
- при нормальной взлетной массе;
- при максимальной взлетной массе.
|
|
|
|
| Крейсерская скорость горизонтального полета на =0-1000м, км/ч:
- при нормальной взлетной массе;
- при максимальной взлетной массе.
|
220-240
205-215
|
220-240
205-215
|
|
| Экономическая скорость полета по прибору на высотах от 0 до 3000м, км/ч
| 120-130
| 120-130
|
|
| Статический потолок, м
|
|
|
|
| Практический потолок, м:
- при нормальной взлетной массе;
- при максимальной взлетной массе.
|
|
|
|
| Вертикальная скорость набора высоты у земли (ПОС. выключена), м/с:
- при нормальной взлетной массе
- при максимальной взлетной массе
|
|
|
|
|
|
|
|
|
| Время набора высоты на номинальном режиме работы двигателей и наивыгоднейшей скорости набора (ПОС. выключена), мин:
- при mвзл. норм.:
1000м.
3000м.
4000м.
5000м.
- при mвзл.макс.:
1000м.
3000м.
4000м.
|
1,8+0,5
6+1
9,5+2
-
2,4+0,5
10,9+1
-
|
1,6
4,8
6,5
8,7
2,3
7,1
10,4
|
|
| Практическая дальность полета на =500м,  , при полной заправке основных топливных баков, с 5% остатком топлива, км:
- при нагрузке 2117кг;(1876)
- при нагрузке 4000кг;
- с одним дополнительным топливным баком;
- с двумя дополнительными топливными баками. , при полной заправке основных топливных баков, с 5% остатком топлива, км:
- при нагрузке 2117кг;(1876)
- при нагрузке 4000кг;
- с одним дополнительным топливным баком;
- с двумя дополнительными топливными баками.
|
|
495(660-30)
|
|
| Центровка:
-без брони ППЦ
-с броней ППЦ
-ПЗ, мм
| +300
+330
-95
| +300
+330
-95
|
Примечание
1. На вертолете Ми-8 МТ с двигателями ТВ3-117МТ с РПР-3АМ (регулятор предельных режимов) величина практического потолка:
- с нормальной взлетной массой составляет 5000м;
- с максимальной взлетной массой составляет 3900м.
2. При включении ПОС (противообледенительная система) винтов и двигателей величина практического потолка уменьшается на 200-300м. Установка ЭВУ (экранно-выхлопное устройство) уменьшает  на 150-200м.
на 150-200м.
3. Разрешается использование форсированного режима двух двигателей на высотах расположения площадок выше1700м, при температурах наружного воздуха от +200С и ниже.
4. Включение эжектора ПЗУ (пылезащитное устройство) снижает тягу НВ примерно на 200-300кг.
5. Включение ПОС уменьшает  набора на 1м/с. Включение эжектора ПЗУ уменьшает скороподъемность на 0,6м/с.
набора на 1м/с. Включение эжектора ПЗУ уменьшает скороподъемность на 0,6м/с.
6. Наивыгоднейшая скорость набора высоты:
для вертолета с двигателями ТВ3-117МТ IIIсер:
до 3000м 120км/ч;
от 3000 до 4000м 110км/ч;
более 4000м 100км/ч.
для вертолета с двигателями ТВ3-117ВМ:
до 2000м 120км/ч;
от 2000 до 4000м 110км/ч;
от 4000 до 5000м 100км/ч;
от 5000 до 6000м 90км/ч.
НЕСУЩЕГО ВИНТА
Для выполнения установившегося полета необходимо чтобы мощность, вырабатываемая силовой установкой, была равна мощности, потребной для полета на данном режиме. Потребной, называется мощность, которую необходимо подводить к несущему винту для создания потребной для полета тяги. В общем случае потребная мощность состоит из индуктивной, профильной мощностей и мощности движения (рис.2.1)


Индуктивная мощность  , затрачиваемая на создание подъемной силы имеет наибольшее значение на режиме висения (70-80%) и уменьшается с увеличением скорости полета вследствие увеличения массы воздуха, проходящего через несущий винт за единицу времени.
, затрачиваемая на создание подъемной силы имеет наибольшее значение на режиме висения (70-80%) и уменьшается с увеличением скорости полета вследствие увеличения массы воздуха, проходящего через несущий винт за единицу времени.
Профильная мощность  , потребная для преодоления профильного сопротивления лопастей НВ. С ростом скорости полета увеличивается.
, потребная для преодоления профильного сопротивления лопастей НВ. С ростом скорости полета увеличивается.
Мощность движения  , затрачиваемая на передвижение вертолета в пространстве, на режиме висения равна нулю, а с увеличением скорости возрастает вследствие роста лобового сопротивления вертолета.
, затрачиваемая на передвижение вертолета в пространстве, на режиме висения равна нулю, а с увеличением скорости возрастает вследствие роста лобового сопротивления вертолета.
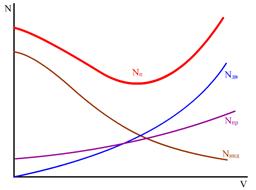
Рис.2.1. Потребная мощность и ее составляющие
Потребная мощность для горизонтального полета  с увеличением скорости полета вначале уменьшается, а затем увеличивается в соответствии с характером изменения , , . Величина потребной мощности зависит, в основном, от следующих эксплуатационных факторов: высоты полета, полетной массы, температуры наружного воздуха и др.
с увеличением скорости полета вначале уменьшается, а затем увеличивается в соответствии с характером изменения , , . Величина потребной мощности зависит, в основном, от следующих эксплуатационных факторов: высоты полета, полетной массы, температуры наружного воздуха и др.
С увеличением высоты горизонтального полета уменьшается плотность воздуха и для создания одной и той же по величине тяги при одной и той же скорости потребная мощность увеличивается. С увеличением полетной массы вертолета требуется большая тяга, поэтому потребная мощность для горизонтального полета увеличивается. С увеличением температуры наружного воздуха уменьшается плотность воздуха на данной высоте, поэтому для создания такой же по величине тяги необходимо увеличивать общий шаг, что в свою очередь ведет к увеличению потребной мощности.
Значительное уменьшение потребной мощности для несущего винта получается при висении вертолета вблизи земли за счет влияния воздушной подушки.
Сущность явления воздушной подушки заключается в том, что индуктивный поток, отбрасываемый винтом вниз, встречает экран (земную поверхность) и кинетическая энергия его рассеивается в ограниченном пространстве под винтом, что создает дополнительное увеличение тяги несущего винта и в конечном счете при  = const способствует уменьшению потребной мощности на висении, т.е. увеличивает запас мощности, что положительно сказывается при выполнении взлетов и посадок на высокогорных площадках при высоких температурах наружного воздуха с максимальной взлетной массой.
= const способствует уменьшению потребной мощности на висении, т.е. увеличивает запас мощности, что положительно сказывается при выполнении взлетов и посадок на высокогорных площадках при высоких температурах наружного воздуха с максимальной взлетной массой.
С увеличением высоты висения эффект влияния воздушной подушки уменьшается и на высоте висения 20м он практически исчезает. Влияние воздушной подушки также пропадает при висении над кустарником, водной поверхностью, т.к. энергия потока в этом случае расходуется в основном на раскачку кустарника и образование волн.
Располагаемая мощность  для несущего винта – это максимальная мощность, которая подводится к несущему винту при работе на взлетном режиме.
для несущего винта – это максимальная мощность, которая подводится к несущему винту при работе на взлетном режиме.
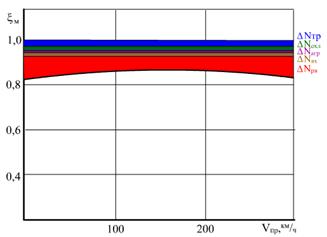
Рис.2.2. Зависимость коэффициента использования
мощности от скорости полета
Она меньше эффективной мощности двигателей  на величину потерь на привод РВ (7-10% на режиме висения и 3-4% на крейсерской скорости), привод агрегатов двигателя и вертолета (1%), трения в трансмиссии (3%), привод вентилятора (1,5%), гидравлические сопротивления входных устройств (2,5%). Кроме того при включении ПОС (4%), СКВ (0,8%). Учитываются эти потери через коэффициент использования мощности (рис.2.2).
на величину потерь на привод РВ (7-10% на режиме висения и 3-4% на крейсерской скорости), привод агрегатов двигателя и вертолета (1%), трения в трансмиссии (3%), привод вентилятора (1,5%), гидравлические сопротивления входных устройств (2,5%). Кроме того при включении ПОС (4%), СКВ (0,8%). Учитываются эти потери через коэффициент использования мощности (рис.2.2).
 , где
, где  =0,83-0,86
=0,83-0,86
Располагаемая мощность для несущего винта изменяется от высоты полета и температуры наружного воздуха точно так же, как и эффективная мощность двигателей при работе их на взлетном режиме, т.е. для двигателя с увеличением высоты полета и температуры наружного воздуха более расчетной, располагаемая мощность падает.
ФИЗИЧЕСКАЯ СУЩНОСТЬ
Ограничения по скорости.
 – на <1000-1500м ограничена по причинам:
– на <1000-1500м ограничена по причинам:
- неустойчивая работа УС-450;
- малы запасы мощности для маневрирования;
- повышенный уровень вибрации.
– на >1000-1500м ограничена по причине реализации всей располагаемой мощности для поддержания вертолета на постоянной высоте.
 – на >1000-1500м ограничена по причине срыва потока на лопастях НВ и как следствие, ухудшения управляемости, непреднамеренного выхода за ограничения.
– на >1000-1500м ограничена по причине срыва потока на лопастях НВ и как следствие, ухудшения управляемости, непреднамеренного выхода за ограничения.
– на <1000-1500м ограничена по причине появления значительных напряжений в забустерной части системы управления от действия шарнирных моментов на лопастях несущего винта.
Ограничения по перегрузкам.
 =1,5 ограничена прочностью конструкции вертолета.
=1,5 ограничена прочностью конструкции вертолета.
 =0,6 ограничена условиями устойчивой работы гидросистемы.
=0,6 ограничена условиями устойчивой работы гидросистемы.
 – ограничена при разгоне только величиной располагаемой мощности, а при торможении возможностью увеличения оборотов несущего винта более допустимых.
– ограничена при разгоне только величиной располагаемой мощности, а при торможении возможностью увеличения оборотов несущего винта более допустимых.
 =(0,15-0,2)
=(0,15-0,2)  – ограничена прочностью хвостовой части вертолета.
– ограничена прочностью хвостовой части вертолета.
Ограничения по углу крена.
 – ограничен максимально допустимой эксплуатационной перегрузкой.
– ограничен максимально допустимой эксплуатационной перегрузкой.
Таблица 2
Максимально допустимые углы крена в зависимости
от высоты полета, градус
| Высота,
м
| При массе вертолета 11100кг и менее
| При массе вертолета более 11100кг
|
| 50-3000
|
|
|
| более 3000
|
|
|
Примечание:
1. Форсированные виражи и развороты на высотах 50-1000м при нормальной взлетной массе и менее на скоростях полета 120-250км/ч разрешается выполнять с кренами до 450.
2. На высотах до 50м над рельефом местности допускается угол крена, по величине равный высоте полета, но не больше значения, указанного в таблице.
Угловая скорость разворота.
На висении ограничена величиной 120/с в виду малого запаса путевого управления, с целью исключения возможности попадания в самопроизвольный разворот.
Скорость ветра.
При раскрутке и остановке несущего винта скорость ветра спереди и сбоку ограничивается из-за возможности касания лопастями несущего винта хвостовой балки. Ветер сзади ограничивается по условиям надежного запуска двигателей.
При рулении ограничения по ветру установлены из-за опасности опрокидывания вертолета.
При взлете и посадке ограничения по ветру такие же, как и при раскрутке (остановке) несущего винта.
Причины ограничения ветра сбоку:
- опасность опрокидывания вертолета на земле после увеличения тяги несущего винта во время взятия шага при взлете;
- появление резкой разбалансировки вертолета в поперечном и путевом отношении в момент отрыва от земли;
- обеспечение необходимого запаса путевого и поперечного управления при взлете и посадке, особенно с предельной взлетной массой;
Причины ограничения попутного ветра:
- неустойчивость положения вертолета хвостом на ветер на висении;
- обеспечение необходимого запаса продольного управления на себя при предельно передней центровке;
- опасность касания земли хвостовой опорой при предельно задних центровках;
- попадание выхлопных газов на вход в двигатели и уменьшение располагаемой мощности
Таблица 3
Допустимая скорость ветра, м/с
| Направление ветра
| При раскрутке и остановке несущего винта
| При взлете и посадке
|
| Встречный
|
|
|
| Боковой справа
|
|
|
| Боковой слева
|
|
|
| Попутный
|
| 10(5*)
|
*- для вертолетов с установленной броневой защитой.
БАЛАНСИРОВКА ВЕРТОЛЕТА
ОСНОВНЫЕ ПОНЯТИЯ УСТОЙЧИВОСТИ,
ПРОДОЛЬНАЯ БАЛАНСИРОВКА
Условиями продольной балансировки является равенство нулю суммы моментов относительно связанной поперечной оси координат и равенство нулю сумм проекции сил на оси  и
и  скоростной системы координат.
скоростной системы координат.
Для горизонтального полета эти условия имеют такой вид:



При выполнении продольной балансировки в полете на заданной скорости летчик действует рычагом «ШАГ-ГАЗ» и продольным отклонением РУ. Рычагом «ШАГ-ГАЗ» устанавливается необходимая величина силы  (полной аэродинамической силы несущего винта), а продольным отклонением РУ – ее наклон (вперед или назад), необходимый для выполнения условий балансировки на заданном режиме полета. Однако наклоном силы только от РУ выполнить одновременно условия равновесия моментов и условия равновесия сил без изменения угла тангажа вертолета практически невозможно. Поэтому в процессе выполнения балансировки балансировочное отклонение РУ определяется выполнением условия равновесия моментов, а окончательное выполнение условия равновесия сил происходит путем соответствующего изменения угла тангажа вертолета.
(полной аэродинамической силы несущего винта), а продольным отклонением РУ – ее наклон (вперед или назад), необходимый для выполнения условий балансировки на заданном режиме полета. Однако наклоном силы только от РУ выполнить одновременно условия равновесия моментов и условия равновесия сил без изменения угла тангажа вертолета практически невозможно. Поэтому в процессе выполнения балансировки балансировочное отклонение РУ определяется выполнением условия равновесия моментов, а окончательное выполнение условия равновесия сил происходит путем соответствующего изменения угла тангажа вертолета.
При продольном отклонении РУ момент от силы  , равный
, равный  , меняется мало, поэтому можно считать, что выполнение условия равновесия моментов на заданном режиме полета происходит в основном за счет изменения момента (
, меняется мало, поэтому можно считать, что выполнение условия равновесия моментов на заданном режиме полета происходит в основном за счет изменения момента ( ).
).
На рисунках 3.4. и 3.5. приведены балансировочные кривые вертолета со спецфермами и без них.
Углы тангажа на графиках приведены относительно строительной горизонтали (пола кабины) вертолета, т.к. в полете летчик ощущает именно этот тангаж.
Наиболее существенно продольная балансировка зависит от скорости полета и продольной центровки.

Рис.3.4. Балансировочные кривые вертолета по скорости
горизонтального полета (со спецфермами)
Масса 13000кг., высота полета 1000м
На висении при отсутствии ветра продольное отклонение РУ и угол тангажа вертолета определяется в основном положением центра тяжести вертолета. При смещении центра тяжести вертолета вдоль продольной оси из заднего положения в переднее увеличивается пикирующий момент от силы , равный . Вертолет начинает опускать нос и перемещаться вперед, т.к. при опускании носа нарушается равновесие продольных сил
(увеличивается сила  ). В этом случае для балансировки вертолета РУ необходимо отклонить назад на такую величину, чтобы момент () уравновесил момент от смещения центровки , а изменение при этом угла тангажа на пикирование установило равновесие продольных сил. При попутном ветре отклонение РУ назад еще более увеличивается.
). В этом случае для балансировки вертолета РУ необходимо отклонить назад на такую величину, чтобы момент () уравновесил момент от смещения центровки , а изменение при этом угла тангажа на пикирование установило равновесие продольных сил. При попутном ветре отклонение РУ назад еще более увеличивается.

Рис.3.5. Балансировочные кривые вертолета по скорости
горизонтального полета
Масса 11100кг., высота полета 1000м
На вертолете Ми-8МТ изменение центровки на 100мм изменяет угол тангажа на 10 практически во всем диапазоне скоростей полета.
С изменением скорости полета наиболее существенное изменение продольной балансировки имеет место в диапазоне скоростей от висения до 70-80км/ч по прибору.
При увеличении скорости от висения до 30-35км/ч по прибору наблюдается резкое увеличение суммарного продольного момента вертолета на кабрирование, для балансировки вертолета необходимо существенно отклонять РУ вперед.
Максимальное балансировочное отклонение РУ вперед будет на скорости 40км/ч.
При дальнейшем увеличении скорости от40-45км/ч до 90-100км/ч величина кабрирующего момента уменьшается, для балансировки вертолета РУ необходимо отклонять назад.
В диапазоне скоростей 100-130км/ч балансировочное положение РУ практически не изменяется. При увеличении скорости более 120км/ч балансировочное отклонение РУ вперед увеличивается и достигает своего наибольшего значения на максимальной скорости.
Такой характер отклонения РУ по скорости определяется в основном изменением продольных моментов НВ и фюзеляжа с изменением скорости полета.
Если преобладает увеличение кабрирующих моментов, то балансировочное отклонение РУ вперед увеличивается, если их отношение не меняется, то не изменяется и отклонение РУ.
Угол тангажа вертолета определяется условием равновесия продольных сил и с увеличением скорости полета увеличивается на пикирование.
При переходе с одного режима к другому даже на одной скорости наблюдается разбалансировка вертолета в продольном направлении (рис.3.6.).
Наибольшая величина разбалансировки вертолета достигается при переходе с режима набора высоты на максимальной мощности двигателей к планированию на РСНВ.
При переходе с режима горизонтального полета в набор высоты на скорости 120км/ч требуется перемещение РУ на себя на величину  =20мм.
=20мм.
При переходе с режима горизонтального полета на РСНВ на скорости 140км/ч требуется отклонение РУ на себя примерно на 25мм.
Наличие груза на внешней подвеске практически не влияет на продольную балансировку вертолета на всех режимах полета.
Потребные углы общего шага у вертолета с увеличением скорости горизонтального полета от висения до 100км/ч уменьшаются и при дальнейшем увеличении скорости возрастают.
Запасы продольного управления имеют наименьшее значение при движении ручки от себя на режиме горизонтального полета с максимальной скоростью, предельно задней центровкой и при движении ручки на себя на режиме висения с предельно передней центровкой при ветре сзади допустимой величины и составляют около пятой части полного диапазона отклонения продольного управления в ту и другую сторону.

Рис.3.6.Балансировочные кривые вертолета по скорости
для различных режимов прямолинейного полета.
Масса 11100кг, центровка 100мм, высота полета 1000м
ПОПЕРЕЧНАЯ БАЛАНСИРОВКА
Условиями поперечной балансировки вертолета являются равенство нулю суммы моментов относительно связанной продольной оси  и равенство нулю суммы проекций сил на поперечную связанную ось координаты
и равенство нулю суммы проекций сил на поперечную связанную ось координаты  . Для горизонтального полета без крена условия поперечной балансировки имеют вид:
. Для горизонтального полета без крена условия поперечной балансировки имеют вид:


В связи с тем, что сила  расположена относительно центра тяжести на большем расстоянии, чем сила
расположена относительно центра тяжести на большем расстоянии, чем сила  , и при этом еще действует поперечный момент НВ
, и при этом еще действует поперечный момент НВ  , то выполнить одновременно условие равновесия моментов и равновесие сил отклонением РУ без создания крена или скольжения не удается.
, то выполнить одновременно условие равновесия моментов и равновесие сил отклонением РУ без создания крена или скольжения не удается.
Поэтому, выполняя поперечную балансировку, летчик поперечным отклонением РУ устанавливает такие величину и направление момента ( ), чтобы уравновесить поперечный момент от силы тяги РВ (
), чтобы уравновесить поперечный момент от силы тяги РВ ( ). При этом для выполнения условия равновесия поперечных сил он создает либо правый крен, либо левое скольжение. При левом скольжении создается боковая сила сопротивления
). При этом для выполнения условия равновесия поперечных сил он создает либо правый крен, либо левое скольжение. При левом скольжении создается боковая сила сопротивления  , а при правом крене – проекция силы веса
, а при правом крене – проекция силы веса  на ось , которые и выполняют условия равновесия поперечных сил.
на ось , которые и выполняют условия равновесия поперечных сил.
Изменение поперечной балансировки с ростом скорости полета оценивается по балансировочным отклонениям РУ (автомата перекоса) в поперечном направлении на различных скоростях установившегося режима полета (рис 3.4.,3.5.,3.6.).
На висении вертолет балансируется только с правым креном до 2-2,50, при отклоненной вправо РУ. Наличие бокового ветра на висении меняет потребное отклонение РУ: ветер слева уменьшает, а ветер справа увеличивает потребное отклонение РУ вправо.
С переходом от режима висения к поступательному полету вплоть до максимальных скоростей полета РУ для обеспечения поперечной балансировки вертолета необходимо отклонять влево.
Такой характер изменения поперечного отклонения РУ по скорости обусловлен тем, что с увеличением скорости полета вектор аэродинамической силы несущего винта отклоняется вправо и возникающий при этом поперечный момент () значительно больше, чем требуется для уравновешивания поперечного момента от силы тяги РВ.
В режиме набора высоты потребные отклонения РУ влево с ростом скорости полета практически такие же, как и в режиме горизонтального полета.
Максимальное отклонение РУ влево требуется при планировании на большой скорости на РСНВ.
Таким образом, минимальный запас отклонения РУ вправо будет на висении при допустимом ветре справа, а влево – на планировании в режиме РСНВ. Запасы управления в этих случаях достаточные.
Рассмотренные случаи поперечной балансировки относились к полету с симметричной поперечной центровкой.
При смещении центровки к правому борту ( ) отклонения РУ вправо будут уменьшаться, т.к. уравновешивание поперечного момента от тяги РВ в этом случае будет осуществлено также и за счет момента поперечной асимметрии. При этом величина силы уменьшается и для выполнения условия равновесия поперечных сил углы крена вправо или скольжения влево будут больше, чем в полете с симметричной поперечной загрузкой.
) отклонения РУ вправо будут уменьшаться, т.к. уравновешивание поперечного момента от тяги РВ в этом случае будет осуществлено также и за счет момента поперечной асимметрии. При этом величина силы уменьшается и для выполнения условия равновесия поперечных сил углы крена вправо или скольжения влево будут больше, чем в полете с симметричной поперечной загрузкой.
При смещении центра тяжести вертолета к левому борту, наоборот, отклонение РУ вправо увеличивается, а углы крена вправо или скольжения влево меньше.
В этом случае на отдельных режимах возможен прямолинейный полет вертолета без крена и скольжения.
Поэтому в случае невозможности симметричного расположения грузов в грузовой кабине рекомендуется располагать их в сторону левого борта в пределах установленного ограничения.
ПУТЕВАЯ БАЛАНСИРОВКА.
Путевая балансировка вертолета достигается при условии равенства нулю суммы моментов относительно связанной вертикальной оси координат  .
.
Для горизонтального полета условие путевой балансировки имеет вид:

Путевая балансировка выполняется изменением силы тяги РВ при отклонении педалей путевого управления. Величина балансировочного значения хода штока РВ, а соответственно и отклонение педалей путевого управления будут зависеть от тех же параметров и условий полета, от которых зависят значения  и .
и .
Наибольшая величина хода штока РВ, а следовательно, и правой педали вперед имеет место на режиме висения, где потребная мощность двигателей наибольшая.
С переходом к горизонтальному полету и с ростом скорости потребная мощность двигателей уменьшается примерно до скоростей 110-120км/ч, а с дальнейшим увеличением скорости горизонтального полета начинает возрастать. Примерно также изменяются с ростом скорости реактивный момент НВ и потребное отклонение педалей для путевой балансировки. Однако из-за увеличения эффективности РВ с увеличением скорости полета наименьшее потребное отклонение правой педали в горизонтальном полете наблюдается не на скоростях 110-120км/ч, а на скоростях 170-180км/ч. С дальнейшим увеличением скорости потребное отклонение правой педали вперед увеличивается (рис. 3.4.,3.5.,3.6.).
При наборе высоты потребные отклонения правой педали вперед больше, чем в горизонтальном полете на той же скорости, из-за большей потребной мощности.
На РСНВ за счет сил трения в редукторе и трансмиссии передается разворачивающий момент, действующий в направлении вращения НВ. Для обеспечения путевой балансировки вертолета на этом режиме требуется отклонение левой педали вперед.
Отклонение педалей в эксплуатационном диапазоне скоростей планирования на РСНВ практически не меняется. При переходе с режима горизонтального полета на режим набора высоты на скорости 120км/ч требуется отклонить правую педаль примерно на 25мм, а на РСНВ при 140км/ч – левую педаль вперед на 25мм от соответствующего балансировочного положения педалей в горизонтальном полете.
Изменение продольной центровки вертолета практически не оказывает влияния на путевую балансировку.
Минимальные запасы путевого управления имеют место на висении с максимальной взлетной массой и на РСНВ.
СПИРАЛЯХ И КООРДИНИРОВАННЫХ
СКОЛЬЖЕНИЯХ
Увеличение угла крена на виражах и спиралях в наборе высоты, а, следовательно, и вертикальной перегрузки приводит к заметному смещению РУ на себя, причем это смещение на левых виражах и спиралях больше, чем на правых. Снижение режима работы двигателей уменьшает расход РУ на себя.

Рис.3.7. Зависимость угла скольжения вертолета от угла крена
при выполнении координированных скольжений
из режимов горизонтального полета на различных скоростях
Поперечная и путевая балансировки на спиралях изменяются незначительно.
Режимы координированных скольжений в летной эксплуатации вертолета применяются в отдельных случаях, когда необходимо сохранять прямолинейный поступательный полет (сохранение заданного курса) при наличии бокового ветра. В частности, примерами применения режимов координированного скольжения могут служить: полет строем, заход на посадку и прицеливание при наличии бокового ветра и т.д.
Координированное скольжение выполняется отклонением педалей в соответствующем направлении. Устранение кренящих моментов, возникающих при этом, осуществляется отклонением РУ в поперечном направлении.
Условием боковой балансировки вертолета являются равновесие моментов относительно вертикальной и продольной осей и равновесие проекции сил на поперечную ось.



Влияние угла скольжения на балансировку вертолета показано на рисунках 3.7.,3.8.

Рис.3.8. Балансировочные кривые вертолета по углу крена
при выполнении координированных скольжений из режимов
горизонтального полета на различных скоростях (без спецферм).
Масса 11100кг, центровка 100мм; высота полета 1000м
ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
Под динамической устойчивостью вертолета понимают его способность самостоятельно (без вмешательства летчика) после прекращения действия внешних возмущений возвращаться к исходному режиму полета при случайном его изменении.
Продольное движение вертолета (без автопилота) обычно представляет колебательный процесс, в котором можно выделить два вида колебаний:
- короткопериодические с периодом колебаний 0,5-3с;
- длиннопериодические с периодом 10-50с.
Первые связаны с вращением вертолета вокруг центра масс, вторые – с изменением траектории движения центра масс вследствие изменения величины и направления скорости полета. Вертолет является неустойчивым на висении летательным аппаратом. Однако, период продольных колебаний вертолета на висении достаточно велик (12-16с), а время удвоения амплитуды равно 3,5-4с, поэтому летчик успевает отклонением рычагов управления погасить возникающее движение.
По мере увеличения скорости полета неустойчивость продольного движения вертолета уменьшается, т.к. уменьшаются характеристики неустойчивости по углу атаки и увеличивается демпфирование.
Поведение вертолета в процессе бокового возмущенного движения определяется в конечном счете величиной и соотношением степеней его поперечной и путевой устойчивости, инерционными характеристиками.
На висении и малых скоростях полета (до 30-40км/ч) боковое движение всех одновинтовых вертолетов колебательно неустойчиво вследствие того, что на этих режимах взаимосвязь движений крена и рыскания еще не велика, а движение по крену неустойчиво.
На больших скоростях полета все вертолеты обладают устойчивостью бокового возмущенного колебательного движения, т.к. увеличивается путевая и поперечная устойчивость и демпфирование.
Движение вертолета Ми-8МТ после возмущения имеет явно выраженный колебательный характер по скорости, углам крена и тангажа с переменной по времени амплитудой этих параметров. Кроме того, наблюдается медленный апериодический уход вертолета с режима. То есть, вертолет Ми-8МТ не обладает динамической устойчивостью во всем диапазоне скоростей полета, в том числе и на висении. Вместе с тем, степень динамической неустойчивости вертолета вполне приемлема, о чем говорит достаточно большое время полета вертолета с освобожденным управлением в спокойной атмосфере при достижении изменения угла крена на 100 как наиболее быстроменяющегося параметра (без автопилота) – две и более минуты. С включением автопилота характеристики возмущенного движения вертолета улучшаются и пилотирование вертолета значительно упрощается.
РЕЖИМЫ ПОЛЕТА ВЕРТОЛЕТА
ДВИГАТЕЛЕЙ
Основное влияние на безопасность запуска двигателей на вертолете оказывает приземный ветер, особенно боковой.

Рис.4.1. Влияние направления ветра на очередность
запуска двигателей
С точки зрения создания благоприятных условий для запуска двигателя рекомендуется при ветре слева первым запускать правый двигатель, а при ветре справа – левый (рис.4.1.). В этом случае неблагоприятное влияние бокового ветра на запускаемый с наветренной стороны двигатель частично компенсируется уменьшением нагрузки, т.к. к моменту запуска наветренного двигателя свободная турбина и НВ уже приведены во вращение. Однако при большой скорости бокового ветра, превышающей 10-15м/с, уменьшение секундного расхода воздуха через компрессор в начальной стадии запуска может вызвать помпаж двигателя, особенно в условиях низких температур наружного воздуха. Наибольшую угрозу для помпажа двигателей вызывает ветер, направленный навстречу струе выходящих газов, т.к. он размывает газовую струю и частично забрасывает ее в воздухозаборники двигателей.
Поэтому для обеспечения надежного запуска и предотвращения помпажа двигателей необходимо соблюдать ограничения по допустимой скорости ветра. На первый взгляд кажется, что в случае необходимости оправданы некоторые нарушения этих ограничений, ибо срыв запуска двигателя, не сопровождаемый помпажом, сам по себе серьезной опасности не представляет. В действительности важно иметь ввиду, что установленные ограничения по допустимой скорости ветра при запуске и остановке двигателей обусловлены не только обеспечением надежности запуска самих двигателей, но главным образом предотвращением удара лопасти НВ по хвостовой балке.
Явление удара лопастей по хвостовой балке возможно при обдуве вертолета ветром сзади или справа






