Изменение угла скольжения вертолета приводит к одновременному изменению как моментов рыскания  , так и моментов крена . Последнее обуславливает движение крена, и наоборот, движение вертолета по крену, вызывает движение рыскания. Взаимосвязь этих движений по мере увеличения скорости полета непрерывно возрастает. Поэтому эти два вида движения нельзя рассматривать раздельно, о них говорят, как об едином – боковом движении вертолета.
, так и моментов крена . Последнее обуславливает движение крена, и наоборот, движение вертолета по крену, вызывает движение рыскания. Взаимосвязь этих движений по мере увеличения скорости полета непрерывно возрастает. Поэтому эти два вида движения нельзя рассматривать раздельно, о них говорят, как об едином – боковом движении вертолета.
3.8.1. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ ПО УГЛУ
СКОЛЬЖЕНИЯ (ПУТЕВАЯ УСТОЙЧИВОСТЬ).
Под статической путевой устойчивостью понимают начальную тенденцию вертолета восстанавливать исходный угол скольжения после случайного его изменения.
На висении в штиль вертолет по углу рыскания (понятие угол скольжения здесь отсутствует) статически нейтрален, т.к. после случайного изменения угла рыскания (курса) путевые моменты от фюзеляжа и рулевого винта не изменяются и вертолет остается в новом положении.
При порывах ветра слева и справа (малой скорости) изменение моментов от тяги РВ и боковой силы фюзеляжа вызывают разворот вертолета на ветер, т.е. вертолет является статически устойчивым. При больших скоростях ветра справа ( >5м/с) тяга РВ падает и вертолет становится неустойчивым в путевом отношении (разворачивается хвостом на ветер).
>5м/с) тяга РВ падает и вертолет становится неустойчивым в путевом отношении (разворачивается хвостом на ветер).
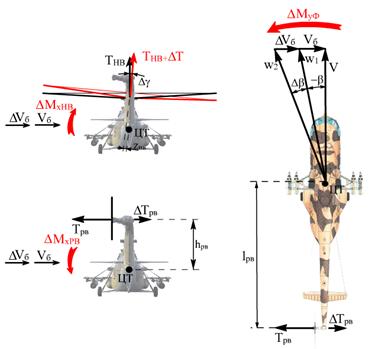
Рис.3.11. Схема изменения путевого и поперечного моментов
при появлении скольжения влево
При полете вперед все вертолеты обладают статической путевой устойчивостью. Этому способствует РВ, киль, а также фюзеляж, если центр давления в боковом движении расположен позади центра масс (у вертолета Ми-8 это наблюдается на всех основных режимах полета) (рис.3.11.).
Статическая путевая устойчивость увеличивается с ростом скорости полета и отрицательного угла атаки фюзеляжа.
3.8.2. ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ ПО
УГЛУ СКОЛЬЖЕНИЯ
Под статической поперечной устойчивостью понимают стремление вертолета восстановить исходный угол крена после случайного его изменения. Вертолет непосредственно на появление крена не реагирует, но изменение крена ведет к изменению равновесия боковых сил и появлению скольжения, которое приводит к появлению поперечных моментов.
Все элементы вертолета способствуют статической поперечной устойчивости, которая увеличивается с увеличением скорости полета и угла атаки вертолета (рис.3.11.).
Вертолет Ми-8МТ во всем диапазоне скоростей полета обладает достаточно большой степенью статической устойчивости по углу скольжения и крену. При достаточно больших расходах ручки в поперечном направлении на единицу угла крена при скольжении устойчивость уменьшается, а при крене 9-140 вертолет становится нейтральным в поперечном отношении.
ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
Под динамической устойчивостью вертолета понимают его способность самостоятельно (без вмешательства летчика) после прекращения действия внешних возмущений возвращаться к исходному режиму полета при случайном его изменении.
Продольное движение вертолета (без автопилота) обычно представляет колебательный процесс, в котором можно выделить два вида колебаний:
- короткопериодические с периодом колебаний 0,5-3с;
- длиннопериодические с периодом 10-50с.
Первые связаны с вращением вертолета вокруг центра масс, вторые – с изменением траектории движения центра масс вследствие изменения величины и направления скорости полета. Вертолет является неустойчивым на висении летательным аппаратом. Однако, период продольных колебаний вертолета на висении достаточно велик (12-16с), а время удвоения амплитуды равно 3,5-4с, поэтому летчик успевает отклонением рычагов управления погасить возникающее движение.
По мере увеличения скорости полета неустойчивость продольного движения вертолета уменьшается, т.к. уменьшаются характеристики неустойчивости по углу атаки и увеличивается демпфирование.
Поведение вертолета в процессе бокового возмущенного движения определяется в конечном счете величиной и соотношением степеней его поперечной и путевой устойчивости, инерционными характеристиками.
На висении и малых скоростях полета (до 30-40км/ч) боковое движение всех одновинтовых вертолетов колебательно неустойчиво вследствие того, что на этих режимах взаимосвязь движений крена и рыскания еще не велика, а движение по крену неустойчиво.
На больших скоростях полета все вертолеты обладают устойчивостью бокового возмущенного колебательного движения, т.к. увеличивается путевая и поперечная устойчивость и демпфирование.
Движение вертолета Ми-8МТ после возмущения имеет явно выраженный колебательный характер по скорости, углам крена и тангажа с переменной по времени амплитудой этих параметров. Кроме того, наблюдается медленный апериодический уход вертолета с режима. То есть, вертолет Ми-8МТ не обладает динамической устойчивостью во всем диапазоне скоростей полета, в том числе и на висении. Вместе с тем, степень динамической неустойчивости вертолета вполне приемлема, о чем говорит достаточно большое время полета вертолета с освобожденным управлением в спокойной атмосфере при достижении изменения угла крена на 100 как наиболее быстроменяющегося параметра (без автопилота) – две и более минуты. С включением автопилота характеристики возмущенного движения вертолета улучшаются и пилотирование вертолета значительно упрощается.
РЕЖИМЫ ПОЛЕТА ВЕРТОЛЕТА






