2.1. Построение планов положений механизма
Построим на чертеже отрезок ОА длиной 40 мм. Тогда масштабный коэффициент для построения планов положений  будет:
будет:
 (м/мм).
(м/мм).
При этом длина отрезка отр (АВ), изображающего шатун АВ будет равна:
 (мм).
(мм).
Построим схему механизма в 12-ти положениях (рис. 2, Лист 1).
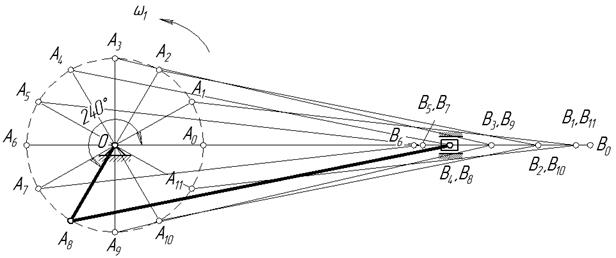
Рис. 2. Схема механизма в 12-ти положениях
2.2. Построение планов скоростей механизма
Определим скорость точки А:
 (м/с).
(м/с).
Вектор полученной скорости перпендикулярен кривошипу ОА и направлен в сторону его вращения. Построим отрезок  мм (графическое изображение
мм (графическое изображение  ). Тогда, приняв, что угловая скорость ведущего звена
). Тогда, приняв, что угловая скорость ведущего звена  постоянна, масштабный коэффициент для планов скоростей будет равен:
постоянна, масштабный коэффициент для планов скоростей будет равен:
 .
.
По теореме о сложении скоростей скорость точки В равна:
 , (1)
, (1)
где  ,
,  и
и  .
.
При шарнирном соединении двух звеньев скорость какой-либо точки звена складывается из скорости шарнира и скорости точки в ее вращательном движении относительно этого шарнира.
Построим планы скоростей для 12 положений механизма, решив векторное уравнение (1) графически (см. Лист 1).
Поскольку по условию задачи угол  º, то рассмотрим подробнее план скоростей для механизма, находящегося в положении 8 (рис. 3).
º, то рассмотрим подробнее план скоростей для механизма, находящегося в положении 8 (рис. 3).
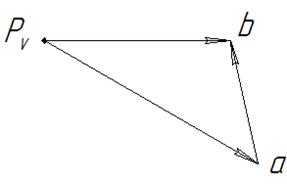
Рис. 3. План скоростей для 8-го положения механизма
Угловую скорость шатуна 2 определяем по формуле (для положения 8):
 (с-1).
(с-1).
Для механизма, находящегося в положении 8, найдем скорость поршня В:
 (м/с).
(м/с).
2.3. Построение плана ускорений механизма в положении 8
Т.к. угловая скорость кривошипа есть величина постоянная, то угловое ускорение этого звена равно нулю. То есть  .
.
Для определения ускорения точки В воспользуемся теоремой о сложении ускорений (аналогично теореме о сложении скоростей):
 ,
,
или в развернутом виде, зная траектории исследуемых точек:
 , (2)
, (2)
где  ,
,  ,
,  ,
,  ,
,  ,
,
 (м/с2),
(м/с2),
 (м/с2).
(м/с2).
Решим векторное уравнение (2) графически, построив план ускорений (рис. 4, Лист 1).
Построим отрезок  (мм) (графическое изображение
(мм) (графическое изображение  ), тогда масштабный коэффициент для плана ускорений будет равен:
), тогда масштабный коэффициент для плана ускорений будет равен:
 .
.
Из плана ускорений находим:
 (м/с2).
(м/с2).
Угловое ускорение шатуна АВ:  (с-2).
(с-2).

Рис. 4. План ускорений для 8-го положения механизма
При определении центра тяжести шатуна АВ –  воспользуемся теоремой подобия: концы векторов ускорений точек одного и того же звена на плане ускорений и отрезки прямых, соединяющих точки самого звена на плане положений, образуют подобные фигуры.
воспользуемся теоремой подобия: концы векторов ускорений точек одного и того же звена на плане ускорений и отрезки прямых, соединяющих точки самого звена на плане положений, образуют подобные фигуры.
Ускорение центра тяжести шатуна АВ:  (м/с2).
(м/с2).
Ускорение точки В:  (м/с2).
(м/с2).
Силовое исследование рычажного механизма
Определение нагрузок
Cилы инерции шатуна 2 и поршня 3:
 (Н);
(Н);
 (Н).
(Н).
Момент инерции шатуна 2:
 (кг·м2).
(кг·м2).
Момент сил инерции, действующих на шатун 2:
 (Н·м).
(Н·м).
Веса звеньев механизма:
Вес шатуна АВ:  (Н);
(Н);
Вес поршня 3:  (Н).
(Н).
Сила давления газов в цилиндре, действующая на поршень 3 в положении 8, будет равна:
 (Н).
(Н).
Определение реакций связей
Рассмотрим отдельно шатун 2 с поршнем 3, отсоединив от ведущего звена по шарниру А. Вычертим звенья 2-3 в выбранном масштабе, приложим к нему силы тяжести  ,
,  ; реакции связей в точке А:
; реакции связей в точке А:  и
и  и в точке В:
и в точке В:  ; силы инерции
; силы инерции  ,
,  и момент сил инерции
и момент сил инерции  , а также силу давления
, а также силу давления  на поршень 3 (рис. 5, Лист 2).
на поршень 3 (рис. 5, Лист 2).

Рис. 5. Шатун 2 и поршень 3 с приложенными силами
Составим для звеньев 2-3 уравнения кинетостатического равновесия в форме моментов:
 ;
;  ,
,
где  (м);
(м);
 (м).
(м).
Тогда:
 (Н).
(Н).
Уравнение равновесия сил в векторной форме для данной системы сил:
 ;
;  .
.
Неизвестные величины и  найдем графическим способом, построив план сил звеньев 2-3 (рис. 6, Лист 2). Для этого из полюса PF отложим отрезок длиной 50 мм, обозначающий известную силу
найдем графическим способом, построив план сил звеньев 2-3 (рис. 6, Лист 2). Для этого из полюса PF отложим отрезок длиной 50 мм, обозначающий известную силу  . Тогда масштабный коэффициент для построения плана сил будет равен:
. Тогда масштабный коэффициент для построения плана сил будет равен:
 Н/мм.
Н/мм.

Рис. 6. План сил звена АВ
Определим длины отрезков, обозначающих остальные известные силы:
 (мм);
(мм);
 (мм);
(мм);
 (мм);
(мм);
 (мм).
(мм).
Зная линии действия неизвестных и  , достраиваем план сил, из которого находим, что:
, достраиваем план сил, из которого находим, что:
 (Н);
(Н);
 (Н).
(Н).
Из построенного плана сил уточняем действительные направления сил  и
и  : действительное направление
: действительное направление  противоположно первоначально выбранному.
противоположно первоначально выбранному.
Перейдем к рассмотрению равновесия кривошипа 1 (рис. 7. Лист 2). Изобразим его в заданном положении и покажем действующие на него силы: реакции связи в точке B:  и
и  (причем
(причем  и
и  ); реакции связи в точке O:
); реакции связи в точке O:  и
и  ; а также уравновешивающий момент Mу. Весом кривошипа пренебрегаем.
; а также уравновешивающий момент Mу. Весом кривошипа пренебрегаем.
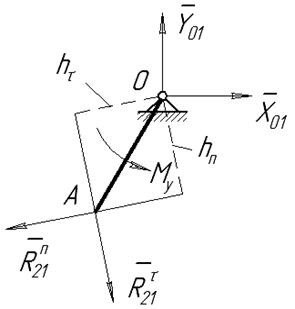
Рис. 7. Кривошип 1 с приложенными силами
Составим для кривошипа 1 уравнение кинетостатического равновесия в форме моментов:
 ;
;  ,
,
где  (м);
(м);
 (м).
(м).
Тогда  (Н·м).
(Н·м).
Величины  и
и  найдем, решив графически уравнение:
найдем, решив графически уравнение:
 ;
;  .
.
Из полюса PF отложим отрезок длиной 240 мм, обозначающий известную силу  (рис. 8, Лист 2). Тогда масштабный коэффициент для построения плана сил будет равен:
(рис. 8, Лист 2). Тогда масштабный коэффициент для построения плана сил будет равен:  (Н/мм); а длина отрезка, обозначающего вектор
(Н/мм); а длина отрезка, обозначающего вектор  будет равна:
будет равна:  (мм).
(мм).
Рис. 8. План сил для ведущего звена
Из построенного плана сил находим:
 (Н);
(Н);
 (Н).
(Н).
Полная реакция связи в точке O:
 (Н).
(Н).

Лист 1
Лист 2
Список литературы
1. Матвеев, Ю.А. Теория механизмов и машин: Учебное пособие / Ю.А. Матвеев, Л.В. Матвеева. – М.: Альфа-М: ИНФРА-М, 2009. – 320с.: ил.
2. Артоболевский, И.И. Теория механизмов и машин: Учеб.для втузов. - 4-е изд., перераб. и доп. / И.И. Артоболевский.– М.: Наука. Гл. ред. физ.-мат. лит., 1988. – 640 с.
3. Чернышева, И.Н. Силовой расчет, уравновешивание, проектирование механизмов и механика манипуляторов: Учебное пособие / И.Н. Чернышева и др.; Под ред. А.К. Мусатова-М.: Изд-во МГТУ, 1990. -80 с., ил.
4. Попов, С.А. Курсовое проектирование по теории механизмов и механике машин: Учеб.пособие для машиностроит. спец. вузов / Попов С.А.; Под ред. К.Ф. Фролова. – М.: Высш. шк., 1986. – 295 с.: ил.
5. Фролов, К.В. Теория механизмов и машин: Учеб.для втузов/К.В. Фролов и др.; Под ред. К.В. Фролова– 2-е изд., перераб. и доп. - М.: Высш. шк., 2008.-496 с.; ил.
6. Заблонский, К.И. Теория механизмов и машин: Учебник / К.И. Заблонский, И.М. Белоконев, Б.М. Щекин.- К.: Вищашк. Головное изд-во, 1989.- 376 с., ил.
7. Кореняко, А.С. Курсовое проектирование по теории механизмов и машин / А.С. Кореняко – Издательство «Вища школа», 2007 г. - 326с.






