В машинах и механизмах, предназначенных для перемотки полосовых материалов, таких, как листовой металл, бумага, различные пленки и т. п., встает задача регулирования усилия в полосе, т. е. натяжения. В большинстве случаев точность поддержания натяжения (или регулирования его по заданному закону) непосредственно влияет на качество продукта.
АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С РЕГУЛИРОВАНИЕМ МОЩНОСТИ
Постоянной скорости движения полосы V и постоянному натяжению соответствует постоянство мощности, расходуемой на создание натяжения. Поддержание постоянства полезной мощности натяжения затруднительно, и в большинстве случаев системы строятся как системы с измерением и поддержанием постоянства электромагнитной мощности двигателя, представляющей собой произведение ЭДС двигателя на ток якоря и отличающейся от полезной мощности на сумму мощности потерь в механизме наматывающего устройства, мощности потерь на вращение двигателя и мощности, затрачиваемой на деформацию полоса при изгибе.
АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ С ПОДДЕРЖАНИЕМ ТОКА ЯКОРЯ
В соответствии со сформулированным в п. 8-1-1 принципом косвенного поддержания натяжения на постоянном уровне, когда поток двигателя должен меняться пропорционально гр, а ток при Г = const сохраняется постоянным, большинство систем регулирования натяжения строится из двух взаимосвязанных систем: системы стабилизации тока якоря двигателя наматывающего устройства с воздействием на напряжение главного преобразователя и системы регулирования ЭДС двигателя с воздействием на поток возбуждения.
Схема ЭП наматывающего устройства с косвенным поддержанием натяжения на постоянном уровне и коррекцией его по сигналу датчика натяжения приведена на рис. 8.4. Система управления током якоря включает в себя контур регулирования тока с датчиком ДТ и регулятором РТ и подчиненный контур регулирования напряжения с датчиком ДН и регулятором РН, выходное напряжение которого воздействует на вход системы управления реверсивного тиристорного преобразователя (ТП1). Рисунок 17 - Структурная схема адаптивной системы управления натяжением вытягиваемого волокна:
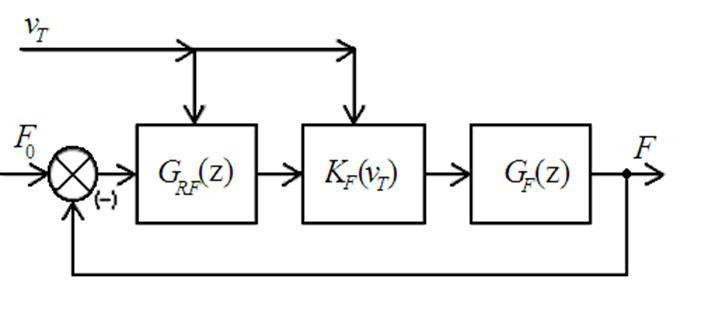
 - заданное значение натяжения вытяжки волокна,
- заданное значение натяжения вытяжки волокна,  - цифровой регулятор натяжения волокна;
- цифровой регулятор натяжения волокна;  - коэффициент передачи в статике и передаточная функция зоны перетяжки
- коэффициент передачи в статике и передаточная функция зоны перетяжки
39. Системы управления Электро Приводами, взаимосвязанными по положению.
К взаимосвязанным системам электропривода относятся моталки прокатных
станов, накаты продольно-резательных станков, испытательные стенды механических трансмиссий вертолетов и других аппаратов. Все они представляют собой автоматические системы регулирования различных переменных (скорости, натяжения, э. д. с, момента и т. д.), связанные между собой различного типа упругими связями объединенные в сложную систему, выполняющую одну целевую функцию. Было установлено, что для комплексных исследований сложных электромеханических систем наиболее общей и целесообразной формой математического описания являются нормированные деталированные структурные схемы (НДС) с обобщенными
параметрами в виде базовых постоянных времени и нелинейных статических
характеристик. Правила направленного нормирования линейных и нелинейных структур позволяют получить критериальную форму структурных моделей с минимальным количеством звеньев и коэффициентов передачи. Сравнительный анализ эффективности структурно-матричных и структурно-машинных методов при оптимизации взаимосвязанных систем электропривода позволил наметить рациональные области их применения, а именно: структурно-матричные методы позволяют проще отыскать условия автономности и осуществить синтез устройств компенсации влияния локальных систем друг на друга; они особенно удобны в том случае, когда к одной из локальных систем предъявляются повышенные требования к показателям качества с целью получения количественных оценок взаимного влияния локальных систем и оценки «слабости» перекрестных связей. В этих случаях целесообразно применять интегральные и частотные критерии взаимосвязи; Структурно-машинные методы позволяют эффективнее осуществлять оптимизацию взаимосвязанных нелинейных структурных моделей типа НДС н получать оптимальные настройки регуляторов, обеспечивающих реализацию различных критериев качества всей системы в целом (без соблюдения и даже с сознательным нарушением условия автономности локальных систем); разработку адекватной модели и оптимизацию сложных структурных моделей в этом случае целесообразно проводить с использованием теории многофакторного планируемого эксперимента. В настоящее время степень взаимосвязи оценивается приближенно в основном по значительному различию частот среза локальных систем. Если степень взаимосвязи превосходит допустимую по условиям работы, то осуществляется синтез перекрестных связей, обеспечивающих автономность систем, или изменяются настройки локальных систем. Синтез автономных систем осуществляется путем введения корректирующих перекрестных связей между регуляторами.






