

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Топ:
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|

Принцип построения замкнутой системы управления положением. Система управления скоростью как подсистемы управления положением
Системы регулирования положения представляют собой класс систем с чрезвычайно широким диапазоном назначений. Онн находят применение в различных промышленных установках и роботах в качестве систем наведения антенн, оптических телескопов, и радиотелескопов, ддя стабилизации различных платформ в условиях качки оснований, на которых монтируются эти платформы, и т.д. Мощность исполнительных двигателей составляет от единиц и десятков ватт до десятков и сотен киловатт, их питание осуществляется от электромашинных, тирксторных преобразователей или транзисторных усилителей мощности. Большую группу приводов с регулированием положения составляют гидравлические и пневматические приводы, которые здесь не рассматриваются.
Контроль положения осуществляется с помощью датчиков, которые в аналоговой илн дискретной форме дают информацию о перемещении рабочего органа механизма на протяжении всего пути. В качестве датчиков используются сельсины, вращающиеся трансформаторы, индуктоснны, импульсные и цифровые датчики и др.
В большинстве случаев мощные промышленные системы управления положением строятся сегодня по принципам подчиненного регулирования при питании двигателей постоянного тока от ТП. При этом внутренние контуры тока и скорости выполняются, как это было описано в п. 2-2-2, но к ним добавляется цифровой или аналоговый контур регулирования положения. На рис. 6-1 показана схема системы управления положением, а которой при переключении переключателя П может быть осуществлено замыкание аналогового или цифрового внешнего контура.
|
|
В первом случае измерительным элементом являются сельсины, работающие а трансформаторном режиме. Сельсин-приемник (СП) связан с исполнительным органом (МО), который приводится двигателем М через редуктор Рд. Подача иа вход управляющего воздействия, которым является поворот сельсина-датчика (СД) на некоторый угол фу относительно согласованного с сельсином-приемником положения, вызывает появление на его однофазной обмотке напряжения переменного тока «с;,я, значение которого определяется значением угла рассогласования, э фаза — направлением поворота относительно согласованного положеиня, т. е. зиа-ком угла. С помощью фазочувстьштельного выпрямителя (ФВЧ) это напряжение выпрямляется, причем полярность напряжения Мф_,в определяется знаком рассогласования. Напряжение, появившееся на выходе регулятора положения (РП), воздействует на вход контура скорости, и двигатель вращается, отрэбагызая рассогласование до тех пор, пока ие установится равенство ф - фу. Параметрами, характеризующими неизменяемую часть контура положения, являются передаточное число редуктора (, коэффициент передачи пары сельсинов. При сравнительно небольших значениях напряжения Uccд регулятор положения ограничивается, т. е. замкнутому контуру положения соответствует работа в начальной, близкой к линейной части синусоиды.
В ряде случаев для повышения точности работы при малых рассогласованиях система снабжается датчикам» грубого н точного отсчетов. В этом случае в диапазоне малых углов рассогласования работает система точного отсчета, в которой датчик соединен с валом ИО через повышающий редуктор, а прн больших рассогласованиях контроль положения осуществляется датчиком грубого отсчета, непосредственно связанным с исполнительным валом.
При ограничении выходного напряжения РП значением Uрпогр максимальная скорость двигателя не превышает номинального значения W.
|
|
Система управления положением в режиме позиционирования. Требования к статической точности и динамике.
Позиционированием называют такой режим работы системы управления положением, при котором задачей системы является перемещение рабочего органа механизма из одного фиксированного положения в другое. Характер траектории перемещения при этом важен лишь постольку, поскольку он обеспечивает минимальное время перемещения, т. е. максимальную производительность механизма, без сколько-нибудь значительного перерегулирования по положению. Позиционные системы находят широкое распространение в различных отраслях техники, в частности в металлургии, станкостроении, подъемно-транспортных механизмах и др.
При рассмотрении позиционной системы различают: а) малые перемещения, при которых ни один из регуляторов не ограничивается н система работает как линейная; б) средние перемещения, прн которых отработка происходит при ограничении регулятора скорости (РС), т. е. при ограничении якорного тока, но участок работы с постоянной скоростью отсутствует; в) большие перемещения, при отработке которых в течение определенного времени двигатель работает на установившейся скорости в результате ограничения РП, а РС ограничивается при разгоне н торможении.
В большинстве промышленных электроприводов, оснащенных позиционными системами, наилучшим считается такой процесс отработки среднего перемещения, при котором скорость изменяется по треугольному графику. Это позволяет в полной мере использовать перегрузочную способность двигателя и исключает возникновение перерегулирования по положению. Для обеспечения такого характера отработки при данном значении заданного перемещения требуется определенное значение коэффициента передачи РП.
При рассмотрении отработки системой средних и больших перемещений обычно делается упрощающее допущение [381: считается, что токовый контур обладает высоким быстродействием, а постоянная времени фильтра тахогенератора Тяс равна нулю.
24.Расчёт параметров регулятора положения, исходя из требований отработки малых перемещений.
.Настройка в случае малых перемещений.Настройку будем рассматривать в относительных единицах, выбрав базовые значения: момента Mб=Mн, скорости ωб=ωн, тока Iяб=Mб/(KΦ) и напряжения Uдсб=kдсωн. Базовое значение напряжения на выходе регулятора положения определяется как Uрпб. За базовое значение угла принимается угол, на который повернется рабочий орган при постоянной скорости ω=ωб за время t=tб: φб=ωбtб/q, где q – передаточное отношение редуктора. Тогда базовое значение напряжения датчика угла будет Uдуб=kдуkдсφб. Учитывая, что угол связан со скоростью интегральным соотношением, в относительных единицах имеем φ=ω/(tбp). Структурная схема привода в относительных единицах получит вид рис. 1
|
|
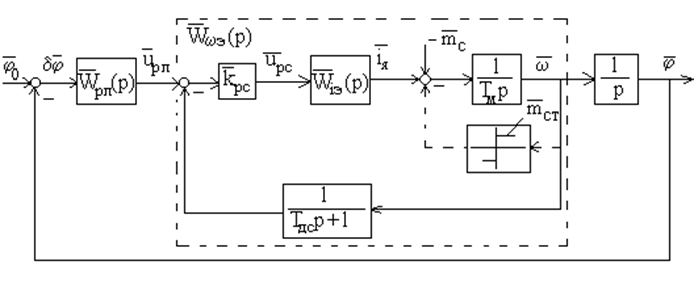
 Рис. 1 Структурная схема следящего привода в режиме позиционирования при малых перемещениях, представленная в относительных единицах.В соответствии с ней передаточная функция разомкнутой системы записывается выражением
Рис. 1 Структурная схема следящего привода в режиме позиционирования при малых перемещениях, представленная в относительных единицах.В соответствии с ней передаточная функция разомкнутой системы записывается выражением
Для определения параметров регулятора положения заменим замкнутый контур скорости апериодическим звеном
 где Tωз=2Tμω – эквивалентная постоянная времени замкнутого контура скорости.
где Tωз=2Tμω – эквивалентная постоянная времени замкнутого контура скорости.
Тогда для настройки системы на оптимум по модулю надо применить пропорциональный регулятор скорости
 Удобно за базовое значение времени принять tб=1 с. ТогдаСвязь между коэффициентом усиления в абсолютных и относительных единицах определяется соотношением
Удобно за базовое значение времени принять tб=1 с. ТогдаСвязь между коэффициентом усиления в абсолютных и относительных единицах определяется соотношением


|
|
|

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!