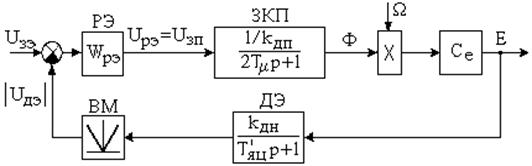
Оптимизация контура регулирования ЭДС в системе двухзонного подчинённого регулирования скорости.
Структурная схема контура ЭДС представлена на рисунке
, 
где Тп = 2Тm – эквивалентная постоянная времени контура потока, оптимизированного на МО.
 ,
,
где Тmэ = Тп + Тяц/ – малая постоянная времени контура ЭДС.
МО:  ®
®
®  .
.
РЭ – интегрального типа.
Оптимальная настройка контура ЭДС будет выполняться только в одной расчетной точке, т.е. при скорости, при которой была проведена оптимизация. Если оптимизация была проведена для номинальной скорости, то при увеличении скорости (за счет ослабления поля двигателя), коэффициент регулятора ЭДС увеличивается, что приведет к подъему ЛАЧХ.
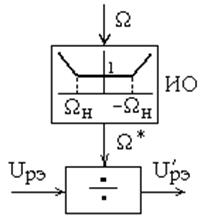
Для сохранения коэффициента усиления в контуре ЭДС неизменным при изменении скорости, на выходе регулятора ЭДС включают делительное (рисунок а), либо
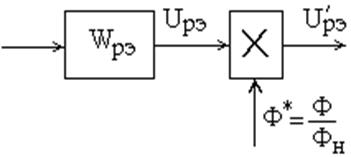
 множительное устройство (рисунок б).
множительное устройство (рисунок б).
Особенности оптимизации контура регулирования скорости в системе двухзонного подчинённого регулирования скорости.
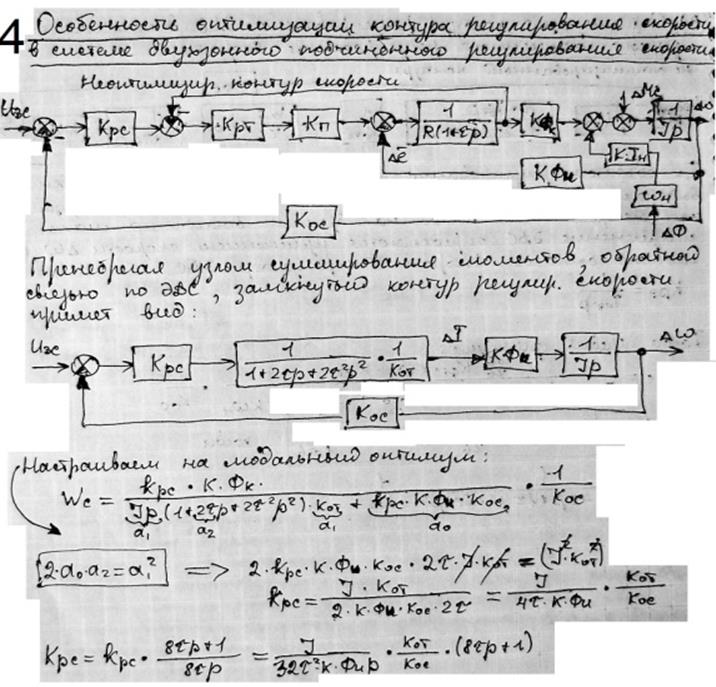 Неоптимизированный контур скорости
Неоптимизированный контур скорости
Структуры СУЭП с двухзвенным преобразователем частоты по схеме «выпрямитель – автономный инвертор тока»
Основными звеньями данных преобразователей частоты являются
• выпрямитель с фильтром;
• инвертор.
Напряжение питающей сети сначала выпрямляется выпрямителем, а затем инвертируется, т.е. преобразуется в переменное напряжение (или ток) требуемой частоты с помощью инвертора.
Автономный инвертор представляет собой коммутатор, для функционирования которого необходимы полностью управляемые переключающие элементы (ключи). Наиболее подходящими для автономных инверторов являются полностью управляемые полупроводниковые приборы (силовые транзисторы, запираемые тиристоры).
Структура входных цепей и режим переключений коммутатора могут быть организованы таким образом, что свойства АИ как электрического генератора оказываются подобными свойствам либо генератора напряжения, либо генератора тока. Инверторы первого типа получили название автономные инверторы напряжения (АИН); второго типа - автономные инверторы тока (АИТ). Инверторы тока формируют в цепи нагрузки ток, величина и форма которого не зависят от параметров нагрузки. Зависимыми от параметров нагрузки оказываются величина и форма выходного напряжения АИТ. Поэтому инверторы тока непосредственно совместимы только с нагрузкой активно-емкостного характера. В противном случае между инвертором и нагрузкой включаются буферные элементы емкостного характера.(14)
16.
 16. Принцип векторного управления. Ориентация системы
16. Принцип векторного управления. Ориентация системы
17. Пример построения системы векторного управления в асинхронном электроприводе серии ЭПВ. В основу синтеза системы векторного управления [18] положена матема-тическая модель асинхронного двигателя в системе координат (d, q), ори-ентированной по вектору потокосцепления ротора (11.1)…(11.5).Функциональная схема системы управления представлена на рис.11.10.Система управления реализована на микропроцессорном контроллере управления двигателем ADMC401 фирмы «АНАЛОГ ДИВАЙС». Информация о векторе потокосцепления ротора (его модуль (r Ψ), угло-вое положение относительно фазы А статора (ψ ϕ) и мгновенная частота вращения (ψ ω)) вычисляется в модели роторной цепи по следующим урав- нениям, полученным из (11.3), (11.4):
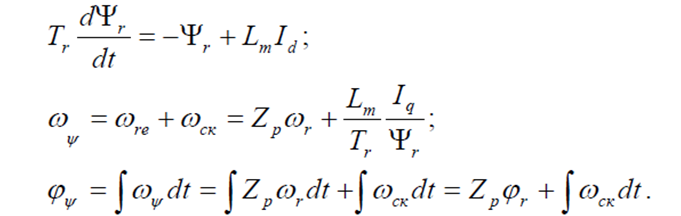
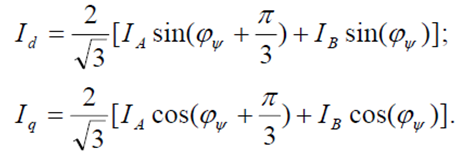
Структурная схема модели роторной цепи изображена на рис.11.11.Преобразователь координат ABC → dq выполняет преобразование фазных токов статора АД из естественной трехфазной системы координат (А,В,С) в ортогональную синхронную систему координат (d,q) по уравнениям
Преобразователь напряжений реализует функции ограничения максимального значения заданного напряжения, обратного преобразования координат и компенсации запаздывания, вносимого системой управления. Алгоритм работы ограничителя напряжения организован таким образом, чтобы во всех режимах работы привода величина заданного выходного напряжения инвертора не превышала его максимального значения с учетом фактического значения входного напряжения инвертора (d U) и ограничений, связанных с неидеальностью силовых ключей. Что соответствует стандартному переходному процессу с перерегулированием 4,3 % и временем регулирования 3 корень из 2 Ткт
18. Синтез системы управления бесконтактным двигателем постоянного тока. Контроль положения ротора.рис.1 Упрощенная принципиальная схема бесконтактного двигателя
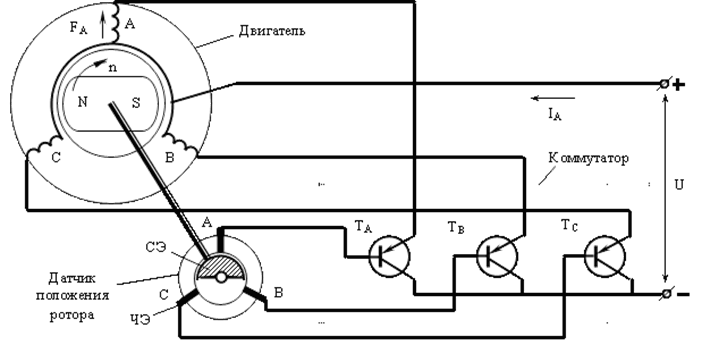
В положении, показанном на рис. 1, сигнальный элемент через чувствительный элемент "А" открывает транзистор ТА. По обмотке фазы А протекает ток IА. Намагничивающая сила обмотки FА взаимодействует с потоком постоянного магнита ротора. Возникает электромагнитный вращающий момент, и двигатель приводится во вращение (1-й такт на рис. 2). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший 30° СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты сразу два транзистора: ТА и ТВ. Ток будет протекать по двум фазам А и В. Появится результирующая МДС статора FАВ, которая повернется на 60° по сравнению с первым положением (2-й такт на рис. 2).
Рис. 2. Первых три такта в работе бесконтактного двигателя постоянного тока
Эта МДС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с МДС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 2). В конечном итоге двигатель достигнет частоты вращения, при которой его электромагнитный момент будет уравновешиваться моментом сопротивления нагрузки.
Рис. 4. Механические характеристики бесконтактного электродвигателя
постоянного тока: 1 – при Тэ=1, 2 – при Тэ=0,5, 3 – при Тэ=0,25
Штриховыми линиями на рис. 4 показана граница устойчивости при Тэ=1. Современные вентильные электродвигатели имеют большую перегрузочную способность (Мп/Мн ≥ 5-10), что объясняется использованием редкоземельных постоянных магнитов. При этом нелинейность механических характеристик не превышает 10%. В большинстве случаев можно считать, что механические характеристики бесконтактного вентильного электродвигателя, работающего в двигательном режиме, совпадают с характеристиками двигателя постоянного тока.
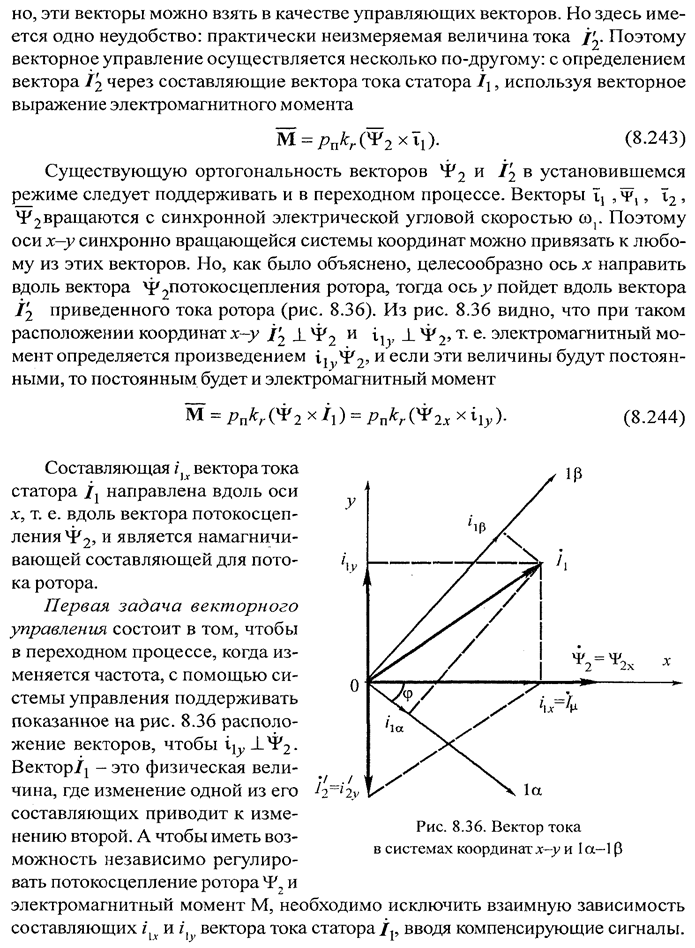
19.Синтез системы векторного управления синхронным двигателем с постоянными магнитами. Особенности реализации обратной связи по скорости.Синтез системы управление выполним на основе динамической модели СДПМ в системе координат (d,q), ориентированной по магнитной оси ротора.
Нулевое задание тока по оси d обеспечивает минимизацию тока статора при заданной величине момента нагрузки. В этом случае ток статора во всех режимах работы привода направлен перпендикулярно магнитной оси ротора (по оси q) в соответствии с векторной диаграммой двигателя на рис 3.4.
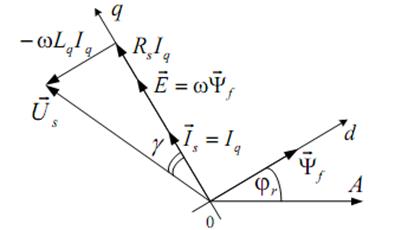
Рис 3.4. Векторная диаграмма СПДМ.
Преобразователь координат dq →ABC выполняет преобразование фазных токов статора из естественной трехфазной системы координат (А,В,С) в ортогональную синхронную систему координат (d,q) по уравнениям: 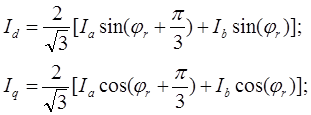
где  – угловое положение ротора (электрическое), полученное с датчика положения.
– угловое положение ротора (электрическое), полученное с датчика положения.
Синтез регуляторов осуществим на основе принципов подчиненного регулирования с использованием метода компенсации нелинейных связей.
Выполним синтез регулятора тока по оси d.
Структурная схема контура тока по оси d:
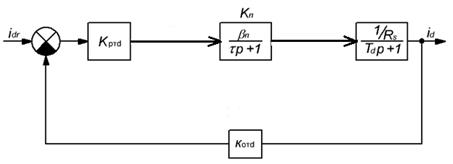
где 
Коэффициент обратной связи в контуре тока по оси d определим по формуле:
Выполним настройку контура тока на модульный оптимум с малой некомпенсируемой постоянной времени, в результате получим:
Синтез контура тока по оси d выполняем аналогично, с той лишь разницей что сигналом его задания будет нулевое значение тока по оси d.
Система управления положением в режиме позиционирования. Требования к статической точности и динамике.
Позиционированием называют такой режим работы системы управления положением, при котором задачей системы является перемещение рабочего органа механизма из одного фиксированного положения в другое. Характер траектории перемещения при этом важен лишь постольку, поскольку он обеспечивает минимальное время перемещения, т. е. максимальную производительность механизма, без сколько-нибудь значительного перерегулирования по положению. Позиционные системы находят широкое распространение в различных отраслях техники, в частности в металлургии, станкостроении, подъемно-транспортных механизмах и др.
При рассмотрении позиционной системы различают: а) малые перемещения, при которых ни один из регуляторов не ограничивается н система работает как линейная; б) средние перемещения, прн которых отработка происходит при ограничении регулятора скорости (РС), т. е. при ограничении якорного тока, но участок работы с постоянной скоростью отсутствует; в) большие перемещения, при отработке которых в течение определенного времени двигатель работает на установившейся скорости в результате ограничения РП, а РС ограничивается при разгоне н торможении.
В большинстве промышленных электроприводов, оснащенных позиционными системами, наилучшим считается такой процесс отработки среднего перемещения, при котором скорость изменяется по треугольному графику. Это позволяет в полной мере использовать перегрузочную способность двигателя и исключает возникновение перерегулирования по положению. Для обеспечения такого характера отработки при данном значении заданного перемещения требуется определенное значение коэффициента передачи РП.
При рассмотрении отработки системой средних и больших перемещений обычно делается упрощающее допущение [381: считается, что токовый контур обладает высоким быстродействием, а постоянная времени фильтра тахогенератора Тяс равна нулю.
24.Расчёт параметров регулятора положения, исходя из требований отработки малых перемещений.
.Настройка в случае малых перемещений.Настройку будем рассматривать в относительных единицах, выбрав базовые значения: момента Mб=Mн, скорости ωб=ωн, тока Iяб=Mб/(KΦ) и напряжения Uдсб=kдсωн. Базовое значение напряжения на выходе регулятора положения определяется как Uрпб. За базовое значение угла принимается угол, на который повернется рабочий орган при постоянной скорости ω=ωб за время t=tб: φб=ωбtб/q, где q – передаточное отношение редуктора. Тогда базовое значение напряжения датчика угла будет Uдуб=kдуkдсφб. Учитывая, что угол связан со скоростью интегральным соотношением, в относительных единицах имеем φ=ω/(tбp). Структурная схема привода в относительных единицах получит вид рис. 1
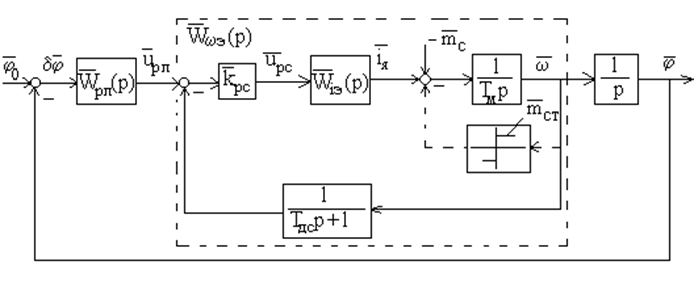
 Рис. 1 Структурная схема следящего привода в режиме позиционирования при малых перемещениях, представленная в относительных единицах.В соответствии с ней передаточная функция разомкнутой системы записывается выражением
Рис. 1 Структурная схема следящего привода в режиме позиционирования при малых перемещениях, представленная в относительных единицах.В соответствии с ней передаточная функция разомкнутой системы записывается выражением
Для определения параметров регулятора положения заменим замкнутый контур скорости апериодическим звеном
 где Tωз=2Tμω – эквивалентная постоянная времени замкнутого контура скорости.
где Tωз=2Tμω – эквивалентная постоянная времени замкнутого контура скорости.
Тогда для настройки системы на оптимум по модулю надо применить пропорциональный регулятор скорости
 Удобно за базовое значение времени принять tб=1 с. ТогдаСвязь между коэффициентом усиления в абсолютных и относительных единицах определяется соотношением
Удобно за базовое значение времени принять tб=1 с. ТогдаСвязь между коэффициентом усиления в абсолютных и относительных единицах определяется соотношением


Оптимизация контура регулирования ЭДС в системе двухзонного подчинённого регулирования скорости.
Структурная схема контура ЭДС представлена на рисунке
,
где Тп = 2Тm – эквивалентная постоянная времени контура потока, оптимизированного на МО.
,
где Тmэ = Тп + Тяц/ – малая постоянная времени контура ЭДС.
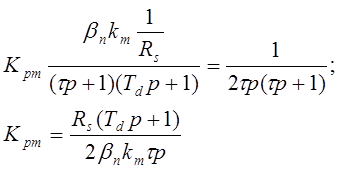
МО: ®
® .
РЭ – интегрального типа.
Оптимальная настройка контура ЭДС будет выполняться только в одной расчетной точке, т.е. при скорости, при которой была проведена оптимизация. Если оптимизация была проведена для номинальной скорости, то при увеличении скорости (за счет ослабления поля двигателя), коэффициент регулятора ЭДС увеличивается, что приведет к подъему ЛАЧХ.
Для сохранения коэффициента усиления в контуре ЭДС неизменным при изменении скорости, на выходе регулятора ЭДС включают делительное (рисунок а), либо
множительное устройство (рисунок б).






