Задача КЗ
(тема: “Составное (сложное) движение точки”)
Прямоугольная пластина (рис. КЗ.0-К3.5) или круглая пластина радиусом R = 60 см (рис. К3.6-К3.9) вращается вокруг неподвижной оси по закону  , заданному в табл. КЗ. Положительное направление отсчета угла j показано на рисунках дуговой стрелкой. Ось вращения на рис. К3.0-К3.3 и К3.8, КЗ.9 перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. К3.4-К3.7 ось вращения OO 1 лежит в плоскости пластины (пластина вращается в пространстве).
, заданному в табл. КЗ. Положительное направление отсчета угла j показано на рисунках дуговой стрелкой. Ось вращения на рис. К3.0-К3.3 и К3.8, КЗ.9 перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. К3.4-К3.7 ось вращения OO 1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой ВD (рис. К3.0-К3.5) или по окружности радиуса R, т.е. по ободу пластины (рис. К3.6-К3.9), движется точка М. Закон ее относительного движения, выражаемый уравнением  (s – в сантиметрах, t – в секундах), задан в табл. КЗ отдельно для рис. КЗ.0-К3.5 и для рис. К3.6-К3.9, при этом для рис. К3.6-3.9
(s – в сантиметрах, t – в секундах), задан в табл. КЗ отдельно для рис. КЗ.0-К3.5 и для рис. К3.6-К3.9, при этом для рис. К3.6-3.9  и отсчитывается по дуге окружности; там же даны размеры b и l. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s <0 точка М находится по другую сторону от точки А).
и отсчитывается по дуге окружности; там же даны размеры b и l. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s <0 точка М находится по другую сторону от точки А).
Определить абсолютную скорость и абсолютное ускорение точки М в момент времени t 1 = 1с.
Указания. В задаче КЗ абсолютное (в неподвижной системе отсчета) движение точки является сложным. При решении задачи движение точки по пластине считать относительным, а вращательное движение самой пластины (подвижная система отсчета) – переносным и воспользоваться теоремами о сложении скоростей и о сложении ускорений. Прежде чем производить расчеты, следует изобразить точку М на пластине в том положении, в котором нужно определить ее абсолютную скорость (или ускорение), а не в произвольном положении, показанном на рисунках к задаче.
В случаях, относящихся к рис. К3.6-К3.9, при решении задачи не подставлять числового значения R, пока не будут определены положение точки М в момент времени t 1 = 1 с и угол между радиусами СМ и СА вэтот момент.
Таблица КЗ
| Номер условия
| Для всех рисунков
| Рис.0-5
| Рис. 6-9
|
| b, см
|
| l
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
| 
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
| 
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
| R
| 
|
|
| 
|
| 
|
| 
|

Перед выполнением задания прочтите по учебнику тему: «Составное (сложное) движение точки».
Обратите внимание на основные положения теории:
1. B каком случае движение точки называется составным движением (относительно данной системы отсчета)? Чем кинематически отличаются выбранные системы координат.
2. Приведите самостоятельно примеры, в которых движение точки можно рассматривать как составное.
3. Дайте определения движений точки: абсолютного, относительного, переносного.
4. Дайте определения скоростей (ускорений) точки: абсолютной скорости  (абсолютного ускорения
(абсолютного ускорения  ), относительной скорости
), относительной скорости  =
=  (относительного ускорения
(относительного ускорения  =
=  ), переносной скорости
), переносной скорости  =
=  (переносного ускорения
(переносного ускорения  =
=  ). Обратите особое внимание на определение переносной скорости и переносного ускорения точки.
). Обратите особое внимание на определение переносной скорости и переносного ускорения точки.
5. Сформулируйте теорему сложения скоростей. Запишите соответствующее уравнение в векторной форме.
6. Сформулируйте теорему сложения ускорений в общем случае (теорема Кориолиса) и в частном случае. Запишите уравнения в векторной форме в обоих случаях.
7. Определение величины и направления ускорения Кориолиса  . Перечислите случаи, в которых ускорение Кориолиса равно нулю. Поясните.
. Перечислите случаи, в которых ускорение Кориолиса равно нулю. Поясните.
После этого находим

Учитывая, что в данном случае угол между  и
и  равен 45°, значение
равен 45°, значение  можно еще определить по формуле
можно еще определить по формуле

5. Определение  . По теореме о сложении ускорений
. По теореме о сложении ускорений
 (7)
(7)
Для определения спроектируем обе части равенства (7) на проведенные оси В 1 xy. Получим
Подставив сюда значения, которые все величины имеют в момент времени t 1 = 2 с, найдем, что в этот момент 
Тогда 
Ответ: = 3,95 м/с, = 12,08 м/с2.
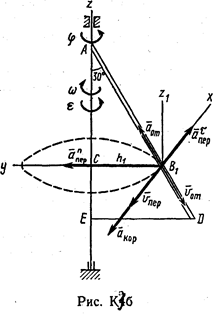
| Пример К3б. Треугольная пластина ADE вращается вокруг оси z, совпадающей со стороной АЕ, по закону j = f 1(t) (положительное направление отсчета угла j показано на рис. К3б дуговой стрелкой). По гипотенузе AD движется точка В по закону s = АВ = f 2(t); положительное направление отсчета s – от A к D.
Дано: j = 0,1 t3 - 2,2 t;
s = АВ = 2 + 15 t – 3 t 2; (j – в радианах, s – в сантиметрах, t – в секундах).
Определить: абсолютную скорость и абсолютное ускорение в момент времени t 1 = 2 с.
|
Решение. Рассмотрим абсолютное движение точки В как сложное, считая ее движение по прямой AD относительным, а вращение пластины – переносным (подвижные оси B 1 xyz связаны с пластиной). Тогда абсолютная скорость  и абсолютное ускорение
и абсолютное ускорение  найдутся по формулам:
найдутся по формулам:
 (1)
(1)
где учтено,что 
Определим все входящие в равенство (1) величины.
1. Относительное движение (мысленно остановим пластину). Это движение задано естественным способом (см. задачу К1б). Закон движения точки по прямолинейной траектории:
s = AB = 2 + 15 t – 3 t2, (2)
поэтому  ,
,  , так как для прямой линии
, так как для прямой линии  .
.
В момент времени t 1 = 2 с имеем
s 1 = AB 1 = 20 см, V отн = 3 см/с, а отн = - 6 см/с2. (3)
Знаки показывают, что вектор направлен в сторону положительного отсчета координаты s, а вектор  – в противоположную сторону. Изображаем эти векторы на рис. К3б.
– в противоположную сторону. Изображаем эти векторы на рис. К3б.
2. Переносное движение (мысленно остановим движение точки по пластине).Это движение (вращение) происходит по закону j = 0,1 t3 - 2,2 t.
Найдем угловую скорость w и угловое ускорение e переносного вращения (см. задачу К2): w =  = 0,3 t 2- 2,2; e =
= 0,3 t 2- 2,2; e =  = 0,6 t и при t 1 = 2 с,
= 0,6 t и при t 1 = 2 с,
w = -1 с-1, e = 1,2 с-2. (4)
Знаки указывают, что в момент t 1 = 2 с направление e совпадает с направлением положительного отсчета угла j, а направление w ему противоположно; отметим это на рис. К3б соответствующими дуговыми стрелками.
Из рисунка находим расстояние h 1 от точки B 1 до оси вращения z:
h 1 = АВ 1 sin 30° = 10 см. Тогда в момент t 1 = 2 с, учитывая равенства (4), получим

 (5)
(5)
Изобразим на рис. К3б векторы и  (с учетом знаков w и e) и
(с учетом знаков w и e) и  ; направлены векторы и перпендикулярно плоскости ADE, а вектор – по линии В 1 С к оси вращения.
; направлены векторы и перпендикулярно плоскости ADE, а вектор – по линии В 1 С к оси вращения.
3. Ускорение Кориолиса. Так как угол между вектором и осью вращения (вектором  ) равен 30°, то в момент времени t 1 = 2 с
) равен 30°, то в момент времени t 1 = 2 с
 (6)
(6)
Направление найдем по правилу Н.Е. Жуковского. Для этого вектор спроектируем на плоскость, перпендикулярную оси вращения (проекция направлена противоположно вектору ) и затем эту проекцию повернем на 90° в сторону , т. е. по ходу часовой стрелки; получим направление вектора . Он направлен перпендикулярно плоскости пластины так же, как вектор (см. рис. К3б).
4. Определение . Так как  , а векторы и взаимно перпендикулярны, то
, а векторы и взаимно перпендикулярны, то  ; в момент времени t 1 = 2 с = 10,44 см/с.
; в момент времени t 1 = 2 с = 10,44 см/с.
5. Определение а абс. По теореме о сложении ускорений
 (7)
(7)
Для определения проведем координатные оси В 1 xyz 1ивычислим проекции  на эти оси. Учтем при этом, что векторы
на эти оси. Учтем при этом, что векторы  и лежат на оси х, а векторы
и лежат на оси х, а векторы  расположены в плоскости В 1 yz 1, т.е. в плоскости пластины. Тогда, проектируя обе части равенства (7) на координатные оси В 1 хyz 1 и учитывая одновременно равенства (3), (5), (6), получим для момента времени t 1 = 2с:
расположены в плоскости В 1 yz 1, т.е. в плоскости пластины. Тогда, проектируя обе части равенства (7) на координатные оси В 1 хyz 1 и учитывая одновременно равенства (3), (5), (6), получим для момента времени t 1 = 2с:



Отсюда находим значение : 
Ответ: V абс = 10,44 см/с, а абс = 16,64 см/с2.
Рис. K4a Рис. K4б
Решение. 1. Строим положение механизма в соответствии с заданными углами и длинами стержней (рис. К4б; на этом рисунке в процессе решения задачи изображаем все векторы скоростей).
2. Определяем VB. Точка B принадлежит стержню 3, совершающему плоскопараллельное движение. Чтобы найти  , нужно знать направление и скорость другой точки звена 3. Такой точкой является точка A, принадлежащая еще звену 1 (звено вращается, см. задачу К2).
, нужно знать направление и скорость другой точки звена 3. Такой точкой является точка A, принадлежащая еще звену 1 (звено вращается, см. задачу К2).
VA = w1 l 1 = 0,8 м/c;  . (1)
. (1)
Направление найдем, учитывая, что точка B принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная  и направление , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня 3) на прямую, соединяющую эти точки (прямая AB). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
и направление , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня 3) на прямую, соединяющую эти точки (прямая AB). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
 и VB = 0,46 м/c. (2)
и VB = 0,46 м/c. (2)
3. Определяем  . Точка Е принадлежит стержню 2, совершающему плоскопараллельное движение. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки D, принадлежащей одновременно стержню 3. Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня АВ; это точка C 3, лежащая на пересечении перпендикуляров к и , восставленных из точек A и B. По направлению вектора определяем направление мгновенного поворота стержня 3 вокруг МЦС C 3. Вектор
. Точка Е принадлежит стержню 2, совершающему плоскопараллельное движение. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки D, принадлежащей одновременно стержню 3. Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня АВ; это точка C 3, лежащая на пересечении перпендикуляров к и , восставленных из точек A и B. По направлению вектора определяем направление мгновенного поворота стержня 3 вокруг МЦС C 3. Вектор  перпендикулярен отрезку C 3 D, соединяющему точки D и C 3, и направлен в сторону мгновенного поворота тела. Величину VD найдем из пропорции
перпендикулярен отрезку C 3 D, соединяющему точки D и C 3, и направлен в сторону мгновенного поворота тела. Величину VD найдем из пропорции
 . (3)
. (3)
Чтобы вычислить C 3 D и С 3 B, заметим, что D AC 3 B – прямоугольный, так как острые углы в нем равны 30° и 60°, и что  . Тогда D BC 3 D является равносторонним и C 3 B = С 3 D. В результате равенство (3) дает
. Тогда D BC 3 D является равносторонним и C 3 B = С 3 D. В результате равенство (3) дает
VD = VB = 0,46 м/c;  . (4)
. (4)
Так как точка Е принадлежит одновременно стержню 4, вращающемуся вокруг O 2, то  . В точках Е и D построим перпендикуляры к скоростям
. В точках Е и D построим перпендикуляры к скоростям  и , получим точку С 2 – МЦС стержня 2. По направлению вектора определяем направление мгновенного поворота стержня 2 вокруг центра С 2. Вектор направлен в сторону поворота этого стержня. Из рис. К4б видно, что
и , получим точку С 2 – МЦС стержня 2. По направлению вектора определяем направление мгновенного поворота стержня 2 вокруг центра С 2. Вектор направлен в сторону поворота этого стержня. Из рис. К4б видно, что  , откуда С 2 E=C 2 D. Составив теперь пропорцию, найдем, что
, откуда С 2 E=C 2 D. Составив теперь пропорцию, найдем, что
 , VE = VD = 0,46 м/c. (5)
, VE = VD = 0,46 м/c. (5)
4. Определяем w2. Так как МЦС стержня 2 известен (точка С 2) и  , то
, то
 . (6)
. (6)
5. Определяем  (рис. К4в, на котором изображаем все векторы ускорений). Точка B принадлежит стержню 3. Чтобы найти , надо знать траекторию точки B и ускорение какой-нибудь другой точки стержня 3. Такой точкой является точка A, принадлежащая еще звену 1. Следовательно,
(рис. К4в, на котором изображаем все векторы ускорений). Точка B принадлежит стержню 3. Чтобы найти , надо знать траекторию точки B и ускорение какой-нибудь другой точки стержня 3. Такой точкой является точка A, принадлежащая еще звену 1. Следовательно,  , где численно
, где численно
 ;
;  . (7)
. (7)
Вектор  направлен вдоль AO 1, а направлен вдоль AO 1, а  – перпендикулярно AO 1; изображаем эти векторы на чертеже (см. рис. К4в). Так как точка В одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и . Для определения воспользуемся равенством (A – полюс): – перпендикулярно AO 1; изображаем эти векторы на чертеже (см. рис. К4в). Так как точка В одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и . Для определения воспользуемся равенством (A – полюс):
 . (8)
Изображаем на чертеже в точке B векторы: , (переносное ускоре-ние точки B), . (8)
Изображаем на чертеже в точке B векторы: , (переносное ускоре-ние точки B),  (вдоль ВА от В к А) (вдоль ВА от В к А)
|
 Рис. K4в
Рис. K4в
|
и  (в любую сторону перпендикулярно ВА); численно
(в любую сторону перпендикулярно ВА); численно  . Найдя w3 с помощью построенного МЦС C 3 стержня 3, получим
. Найдя w3 с помощью построенного МЦС C 3 стержня 3, получим
 и
и  . (9)
. (9)
Таким образом, у величин, входящих в равенство (8), неизвестны только числовые значения aB и  ; их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
; их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
Чтобы определить aB, спроектируем обе части равенства (8) на направление ВА (ось х), перпендикулярное неизвестному вектору . Тогда получим
 . (10)
. (10)
Подставив в равенство (10) числовые значения всех величин из (7) и (9), найдем, что
 . (11)
. (11)
Так как aB >0, то вектор направлен, как показано на рис. К4в.
6. Определяем e3. Чтобы найти e3, сначала определим . Для этого обе части равенства (8) спроектируем на направление, перпендикулярное АВ (ось у). Тогда получим
 . (12)
. (12)
Подставив в равенство (12) числовые значения всех величин из (11) и (7), найдем, что  . Знак указывает, что направление противоположно направлению, показанному на рис. К4в.
. Знак указывает, что направление противоположно направлению, показанному на рис. К4в.
Из равенства  получим
получим  .
.
Ответ: VB =0,46 м/c; VE =0,46 м/c; w2= 0,67 c-1; ; e3= 2,56 c-2.
Примечание. Если точка В, ускорение которой определяется, движется не прямолинейно (например, как на рис. К4.0-К4.4, где В принадлежит вращающемуся звену 4 и движется по окружности радиуса O 2 B), то направление заранее неизвестно. В этом случае также следует представить двумя составляющими ( ) и исходное уравнение (8) примет вид
) и исходное уравнение (8) примет вид
 . (13)
. (13)
При этом вектор  (см., например, рис. К4.0) будет направлен вдоль BO 2, а вектор
(см., например, рис. К4.0) будет направлен вдоль BO 2, а вектор  – перпендикулярно BO 2 в любую сторону. Числовые значения
– перпендикулярно BO 2 в любую сторону. Числовые значения  ,
,  и
и  определяются так же, как в рассмотренном примере (в частности, по условиям задачи может быть
определяются так же, как в рассмотренном примере (в частности, по условиям задачи может быть  или
или  , если точка А движется прямолинейно).
, если точка А движется прямолинейно).
Значение  также вычисляется по формуле
также вычисляется по формуле  , где l – радиус окружности O 2 B, а VB определяется так же, как скорость любой другой точки механизма.
, где l – радиус окружности O 2 B, а VB определяется так же, как скорость любой другой точки механизма.
После этого в равенстве (13) остаются неизвестными только значения  и и они, как и в рассмотренном примере, находятся проектированием обеих частей равенства (13) на две оси.
и и они, как и в рассмотренном примере, находятся проектированием обеих частей равенства (13) на две оси.
Найдя , можем вычислить искомое ускорение  . Величина служит для нахождения e AB (как в рассмотренном примере).
. Величина служит для нахождения e AB (как в рассмотренном примере).
Вопросы для самоконтроля по кинематике
1. Векторный способ задания движения точки. Определение скорости при векторном способе задания движения точки.
2. Векторный способ задания движения точки. Определение ускорения точки.
3. Координатный способ задания движения точки. Определение траектории и скорости точки (величины и направления).
4. Координатный способ задания движения точки. Определение ускорения точки (величины и направления).
5. Естественный способ задания движения точки. Определение скорости точки.
6. Естественный способ задания движения точки. Касательное, нормальное, полное ускорения (физический смысл, величина, направление).
7. Поступательное движение твердого тела (определение). Теорема о траекториях, скоростях и ускорениях точек твердого тела. Задание движения тела.
8. Вращение твердого тела вокруг неподвижной оси (определение). Уравнение вращательного движения твердого тела вокруг неподвижной оси. Угловая скорость и угловое ускорение тела. Определение характера вращения тела.
9. Скорость и ускорение точки твердого тела, вращающегося вокруг неподвижной оси.
10.Угловая скорость тела как вектор.
11.Составное движение точки. Переносное, относительное, абсолютное движения точки (определения).
12.Составное движение точки. Переносная, относительная, абсолютная скорости точки (определения). Теорема сложения скоростей.
13.Составное движение точки. Переносное, относительное, абсолютное ускорения точки (определения). Теорема сложения ускорений в общем случае (теорема Кориолиса).
14.Определение величины и направления ускорения Кориолиса. Случаи равенства нулю ускорения Кориолиса.
15.Плоскопараллельное (плоское) движение тела (определение). Уравнения движения тела. Разложение движения на простые. Независимость угловых параметров от выбора полюса.
16.Определение абсолютной скорости точки тела методом полюса при плоском движении тела. Теорема о проекциях скоростей точек тела на прямую, проходящую через эти точки.
17.Мгновенный центр скоростей тела, совершающего плоское движение (определение). Нахождение мгновенного центра скоростей тела.
18.Мгновенный центр скоростей тела; определение абсолютной скорости любой точки тела; определение угловой скорости тела при плоском движении тела.
19.Частные случаи нахождения мгновенного центра скоростей тела при плоском движении тела.
20.Определение абсолютного ускорения точки тела методом полюса при плоском движении тела.
ДИНАМИКА
Динамика изучает движение материальных точек и механических систем с учетом сил, которые влияют на это движение.
Таблица Д1
| Номер условия
| m, кг
|  , м/с , м/с
| Q, H
| R, H
| l, м
| t 1, с
| Fx, H
|
|
|
|
|
| 0,4 V
| -
| 2,5
| 2sin(4 t)
|
|
| 2,4
|
|
| 0,8 V 2
| 1,5
| -
| 6 t
|
|
| 4,5
|
|
| 0,5 V
| -
|
| 3sin(2 t)
|
|
|
|
|
| 0,6 V 2
|
| -
| -3cos(2 t)
|
|
| 1,6
|
|
| 0,4 V
| -
|
| 4cos(4 t)
|
|
|
|
|
| 0,5 V 2
|
| -
| -6sin(2 t)
|
|
| 1,8
|
|
| 0,3 V
| -
|
| 9 t 2
|
|
|
|
|
| 0,8 V 2
| 2,5
| -
| -8cos(4 t)
|
|
|
|
|
| 0,5 V
| -
|
| 2cos(2 t)
|
|
| 4,8
|
|
| 0,2 V 2
|
| -
| -6sin(4 t)
|
Указания. Задача Д1 – на составление и интегрирование дифференциальных уравнений движения точки (решение первой и второй задач динамики точки). Решение задачи разбивается на две части. Сначала нужно составить векторное уравнение движения точки (груза) на участке AB, спроектировать это уравнение на координатную ось, направленную вдоль AB, и проинтегрировать полученное дифференциальное уравнение методом разделения переменных, учитывая начальные условия (вторая задача динамики точки). Затем, зная время движения на участке АВ или его длину, определить скорость груза в точке В. Эта скорость будет начальной для движения груза на участке ВС.
После этого нужно составить векторное уравнение движения точки (груза) на участке BC и спроектировать это уравнение на две координатные оси, направленные вдоль BC и перпендикулярно BC. Так как в первое полученное уравнение входит сила трения  , то нужно сначала найти нормальную реакцию N из второго уравнения (первая задача динамики точки). Затем нужно подставить найденное значение N в первое уравнение и проинтегрировать это уравнение с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая, что в этот момент времени t = 0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина l участка, целесообразно перейти в уравнении от переменных
, то нужно сначала найти нормальную реакцию N из второго уравнения (первая задача динамики точки). Затем нужно подставить найденное значение N в первое уравнение и проинтегрировать это уравнение с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая, что в этот момент времени t = 0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина l участка, целесообразно перейти в уравнении от переменных  , t к переменным , х, учитывая, что
, t к переменным , х, учитывая, что
 .
.
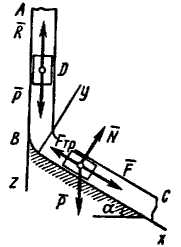 Рис. Д1
Рис. Д1
| Пример Д1.На вертикальном участке АВ трубы (рис. Д1) на груз D массой т действуют сила тяжести и сила сопротивления  ; расстояние от точки А, где V = V 0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F (t), заданная в ньютонах.
Дано: т= 2 кг, R = mV 2, где m = 0,4 кг/м, V 0 = 5 м/с,
l = 2,5 м, Fх = 16 sin (4 t).
Определить: х = f (t) – закон движения груза на участке ВС. ; расстояние от точки А, где V = V 0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F (t), заданная в ньютонах.
Дано: т= 2 кг, R = mV 2, где m = 0,4 кг/м, V 0 = 5 м/с,
l = 2,5 м, Fх = 16 sin (4 t).
Определить: х = f (t) – закон движения груза на участке ВС.
|
Решение. 1. Рассмотрим движение груза на участке АВ, считая груз материальной точкой. Изображаем груз (в произвольном положении) и приложенные к нему силы  и
и  . Запишем дифференциальное уравнение движения груза в векторной форме:
. Запишем дифференциальное уравнение движения груза в векторной форме:
 . (1)
. (1)
Проводим ось Az в сторону движения точки и проектируем (1) на эту ось:
 , (2)
, (2)
где учтено, что  ,
,  . Подчеркнем, что в уравнении (2) все переменные силы надо обязательно выразить через величины, от которых они зависят. Учитывая, что
. Подчеркнем, что в уравнении (2) все переменные силы надо обязательно выразить через величины, от которых они зависят. Учитывая, что  и делая замену
и делая замену  , получим уравнение
, получим уравнение
 . (3)
. (3)
Разделим обе части (3) на m и введем обозначение
 .
.
Тогда уравнение (3) приобретает вид
 . (4)
. (4)
Решим уравнение (4). Разделим переменные V и z, выполнив два действия: обе части (4) умножим на dz и разделим на  ; получим:
; получим:
 .
.
Интегрируя это уравнение, найдем:
 . (5)
. (5)
Находим C 1. Подставим в (5) начальные условия:  ,
,  ,
,  .
.
 .
.
Найденное выражение для C 1 подставляем в (5):
 ,
,
или
 и
и  .
.
Отсюда
 . (6)
. (6)
Полагая в равенстве (6) z = l = 2,5 м,  ,
,  , е = 2,7 и подставляя ранее найденное k = 0,2 м -1, определим скорость
, е = 2,7 и подставляя ранее найденное k = 0,2 м -1, определим скорость  груза в точке В:
груза в точке В:
 (7)
(7)
2. Рассмотрим движение груза на участке ВС; найденная скорость будет для движения на этом участке начальной скоростью ( ). Изображаем груз (в произвольном положении) и действующие на него силы (активные и реакции связей):
). Изображаем груз (в произвольном положении) и действующие на него силы (активные и реакции связей):  Запишем дифференциальное уравнение движения груза в векторной форме:
Запишем дифференциальное уравнение движения груза в векторной форме:
 . (8)
. (8)
Проведем из точки В оси Вх (в сторону движения точки) и Вy и проектируем (8) на ось Вх:
 , (9)
, (9)
где учтено, что , ,  . Сила N неизвестна; следовательно, прежде чем интегрировать (9), найдем N, решив первую задачу динамики точки. Для этого спроектируем векторное уравнение (8) на ось Вy:
. Сила N неизвестна; следовательно, прежде чем интегрировать (9), найдем N, решив первую задачу динамики точки. Для этого спроектируем векторное уравнение (8) на ось Вy:
 . (10)
. (10)
Учтем, что движение точки происходит по прямой,  и, следовательно,
и, следовательно,  . Тогда из (10) получаем
. Тогда из (10) получаем  . Подставим этот результат в (9):
. Подставим этот результат в (9):

Подставим в это уравнение заданные численные значения (чтобы избежать громоздкой записи). Тогда получим
 (11)
(11)
Решим уравнение (11). Разделим переменные Vx и t. Умножим обе части (11) на dt:
 ;
;
интегрируя, найдем
 (12)
(12)
Находим C 2. Подставим в (12) начальные условия: ,  , где дается равенством (7). Найденное значение С 2 = 8,4 подставляем в (12):
, где дается равенством (7). Найденное значение С 2 = 8,4 подставляем в (12):
 .
.
Так как  , то
, то
 . (13)
. (13)
Решим уравнение (13). Разделим переменные x и t. Умножим обе части (13) на dt:
 ;
;
интегрируя, найдем
 (14)
(14)
Находим C 3. Подставим в (14) начальные условия: ,  . Найденное значение С 3 = 0 подставляем в (14):
. Найденное значение С 3 = 0 подставляем в (14):
 .
.
Ответ: , где х – в метрах, t – в секундах.
Задача Д2
(тема “Теорема о движении центра масс системы”)
Механическая система состоит из грузов D 1 массой m 1 = 2 кг и D 2 массой m 2 = 6 кг и из прямоугольной вертикальной плиты массой m 3 = 2 кг, движущейся вдоль горизонтальных гладких направляющих (рис. Д2.0-Д2.9, табл. Д2). В момент времени t 0 = 0, когда система находилась в покое, под действием внутренних сил грузы начинают двигаться по желобам, представляющим собой окружности радиусов r = 0,4 м и R = 0,8 м.
При движении грузов угол  изменяется по закону
изменяется по закону 
|
|
|




















