На рис. 4.1. изображена схема объезда неподвижного препятствия.
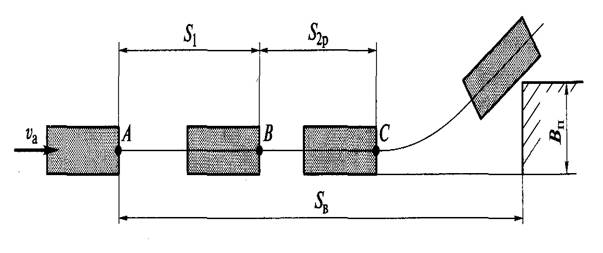
Рис. 4.1. Схема объезда неподвижного препятствия:
S 1, S 2 p – путь, проходимый транспортным средством за время реакции водителя t 1 и время срабатывания рулевого механизма t 2 p соответственно; SB – расстояние конкретной видимости;
Вп – ширина препятствия;
v а – скорость движения транспортного средства.
Главная цель анализа заключается в установлении технической возможности совершения водителем в данных дорожных условиях маневра для предотвращения ДТП.
Для успешного выполнения маневра прежде всего необходима достаточная ширина проезжей части. Динамический коридор, занимаемый движущимся ТС, больше его ширины и составляет примерно

где Ва – габаритная ширина ТС;
La – габаритная длина ТС;
Δб – интервал безопасности с каждой стороны ТС:

при прямолинейном движении на равнинных дорогах можно принять
Основные параметры, характеризующие маневр, следующие:
1) продольное перемещение ТС при маневре, возможное в данной дорожной обстановке (рис. 4.2):.
где Км – коэффициент маневра, показывающий во сколько раз фактический путь маневра X ф больше теоретического пути Хм,
коэффициент Км компенсирует недостатки расчетной модели и недостаточную квалификацию водителей:

где ам, Ьм – эмпирические коэффициенты, зависящие от состояния дорожного покрытия (ам = 1…15; b м = 0,0035 …0,005).
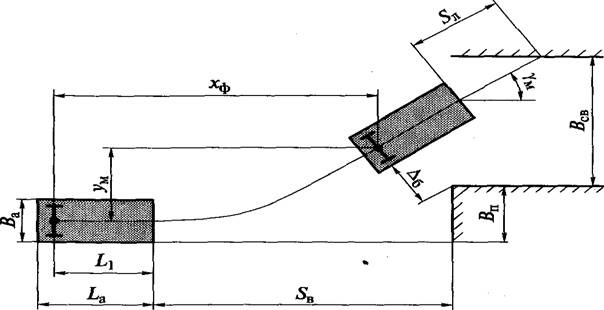
Рис. 4.2. Схема к расчету маневра транспортного средства:
Всв – ширина проезжей части, свободной от транспортных средств;
Sл – расстояние от левого переднего угла транспортного средства до левой границы проезжей части в конце объезда препятствия;
Хф Y м – продольное и поперечное перемещение транспортного средства соответственно;
ум – курсовой угол во время маневра;
Дб – интервал безопасности
При маневре «вход в поворот»
При маневре «смена полосы движения»

2)курсовой угол во время маневра
02 поперечное перемещение ТС при его продольном перемещении на X ф:
- при маневре «вход в поворот»
- при маневре «смена полосы движения»
Условие возможности выполнения маневра:
- при маневре «вход в поворот»

- при маневре «смена полосы движения»

где Впр – ширина проезжей части автомобильной дороги;
L 1 – расстояние от передней части ТС до его заднего моста.
При выполнении маневра следует также определить наличие свободного пространства перед ТС в конце объезда и возможность дальнейшего движения без дополнительного маневрирования и экстренного торможения.
Так, например, после окончания маневра «вход в поворот» передние колеса ТС повернуты на угол γм, и для возвращения их в нейтральное положение нужно некоторое время. В течение этого времени ТС будет продолжать криволинейное движение и для сохранения безопасности необходимо наличие свободного пространства впереди ТС. Это пространство характеризуется расстоянием от левого переднего угла ТС до левой границы проезжей части в конце объезда препятствия:

где Вл – ширина проезжей части, свободной от ТС.
При совершении маневра «смена полосы движения» необходимо лишь, чтобы ширина свободной от препятствия проезжей части была достаточной для движения ТС параллельно прежнему направлению.






