

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Рассмотрим два случая наезда (рис. 2.1), наезд передней частью транспортного средства (случай а) и наезд боковой поверхностью транспортного средства(случай б).

Рис. 2.1. Схема к определению удаления транспортного средства от места наезда на пешехода в момент возникновения опасной обстановки S уд .:
а – при наезде передней частью транспортного средства;
б – при наезде боковой поверхностью транспортного средства;
| l У | - | расстояние, пройденное пешеходом по полосе движения транспортного средства; |
| l Х | - | расстояние между местом удара на боковой части транспортного средства и его передней частью; |
| S п | - | путь, пройденный пешеходом с момента возникновения опасной обстановки до наезда; |
| S уд | - | удаление автомобиля от линии следования пешехода в момент возникновения опасной обстановки; |
| Δ y | - | путь, пройденный пешеходом до полосы движения автомобиля. |
Если наезд произошел без торможения, удаление ТС от места наезда в момент начала движения пешехода определяется по формулам:
где
| l У | - | расстояние, пройденное пешеходом по полосе движения транспортного средства; |
| V а | - | скорость движения автомобиля; |
| Δ y | - | путь, пройденный пешеходом до полосы движения автомобиля. |
где
| LX | - | расстояние между местом удара на боковой поверхности ТС и его передней частью; |
| V а | - | скорость движения автомобиля; |
| Δ y | - | путь, пройденный пешеходом до полосы движения автомобиля. |
Далее определяют длину остановочного пути ТС:

Полученное значение So сравнивают с S уд. При So < S уд. можно дать заключение, что ТС при своевременно предпринятом интенсивном торможении остановилось бы до линии следования пешехода. Таким образом, у водителя имелась техническая возможность предотвратить наезд.
|
|
При So > S уд. можно сделать противоположный вывод. Однако полученные в этом случае результаты нельзя считать окончательными. Возможны обстоятельства, при которых водитель, своевременно затормозив, успел бы пропустить пешехода (движение с четвертой безопасной скоростью).
Расчеты можно продолжить следующим образом.
Расстояние, на которое переместилось бы заторможенное ТС после пересечения линии следования пешехода:

Скорость движения ТС в момент пересечения им линии следования пешехода при своевременном торможении:

Время движения ТС с момента возникновения опасной обстаовки до пересечения линии следования пешехода при условии своевременного торможения:
Перемещение пешехода за время t 'а
Условие безопасного перехода полосы движения ТС пешеходом

где
| B а | - | габаритная ширина ТС; |
| Δб | - | безопасный интервал, вычисляемый по формуле: |

Для ответа на вопрос «Имел ли водитель техническую возможность в данной дорожной обстановке начать торможение ТС?» необходимо определить время движения пешехода в поле зрения водителя и сравнить его с временем Т, необходимым для начала полного торможения ТС. Если в результате расчетов будет установлено, что tn ≤ Т, можно сделать вывод, что водитель не имел в своем распоряжении технических средств, применение которых позволило бы ему предотвратить наезд на пешехода. Даже при своевременном начале торможения водителю при tn ≤ Т не удалось бы избежать наезда ввиду малого промежутка времени, которым он располагал. Дальнейшие расчеты в этом случае не изменят сделанного вывода.
При tn > Т можно сделать вывод, что водитель не использовал всех имеющихся у него средств для предотвращения ДТП, т.е. действовал неправильно с технической точки зрения.
|
|
Время движения пешехода в поле зрения водителя:
при фронтальном ударе

при боковом ударе
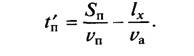
При небольших значениях l Х разница между временем движения пешехода до наезда tn и в поле зрения водителя t ' n невелика, однако при некоторых обстоятельствах может быть существенна. Если удар пешеходу был нанесен деталью в зоне заднего моста или полуприцепа и значение l Х достаточно велико, расчеты могут показать, что пешеход начал движение, уже находясь вне поля зрения водителя.
Удар пешеходу может быть нанесен также передним углом ТС. Последовательность расчетов и применяемые формулы в данном случае не меняются. Этот вариант наезда можно рассматривать как промежуточный между двумя описанными. Если удар нанесен ближним углом то l Х = 1У = 0, если дальним, то lY = Ва.
II.1. 2. Наезд на пешехода при замедленном движении ТС
Рассмотрим фронтальный наезд на пешехода ТС, перемещающегося юзом (рис. 2.2). Примем, что путь пешехода с момента возникновения опасной обстановки до наезда S П, скорости двиовки ТС V а и пешехода V П, перемещение ТС в заторможенном состоянии после наезда на пешехода S П.Н. и полная длина тормозного следа S Ю известны.
Время движения ТС из положения I до линии следования пешехода равно времени движения пешехода t П на пути S П. На пути I-II ТС движется равномерно, на пути II-III – замедленно, скорость его уменьшается от V а до скорости наезда V н..
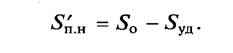
Удаление ТС от места наезда определяется как:

где
| t зап | - | Время запаздывания, просроченное водителем с принятием мер безопасности (при своевременном торможении t зап = 0). |
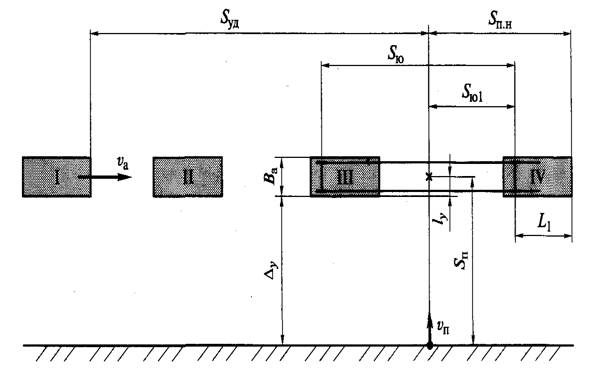
Рис. 2.2. Схема к определению удаления транспортного средства от места наезда на пешехода в момент возникновения опасной обстановки, S уд
при замедленном движении транспортного средства
и фронтальном ударе пешехода:
I – возникновение опасной обстановки; II – начало нарастания замедления;
III – начало полного торможения; IV – положение остановившегося автомобиля; L 1 – расстояние от передней части транспортного средства
до его заднего места;
В то же время

Следовательно:
|
|

или

Отсюда:
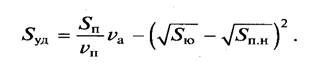
Полученное значение S уд сравнивают с So . При So < S уд. можно дать заключение, что ТС при своевременно предпринятом интенсивном торможении остановилось бы до линии следования пешехода. Таким образом, у водителя имелась техническая возможность предотвратить наезд.
При So > S уд. можно сделать противоположный вывод. Для полного анализа условий безопасности движения проверяют, успел бы пешеход в случае своевременного торможения ТС покинуть полосу движения ТС до того, как последний приблизится к линии следования пешехода, своевременно ли водитель применил торможение.
Рассмотрим основные варианты данного ДТП. Определение наличия у водителя технической возможности предотвратить наезд на пешехода проводится в такой последовательности.
Перемещение ТС в заторможенном состоянии после наезда на пешехода

где
| S ю1 | - | расстояние от места наезда до конца следа юза ТС; |
| L1 | - | расстояние от передней части ТС до его заднего моста. |
Скорость движения ТС в момент наезда:

Скорость движения ТС в момент, предшествующий торможению:

где
| t 3 | - | время нарастания замедления. |
Условие возможности остановки ТС до линии следования пешехода So < S уд.
Проверяя, была ли у водителя возможность пропустить пешехода, расчеты продолжают следующим образом.
Перемещение ТС после пересечения линии следования пешехода при своевременном торможении:
Скорость движения ТС в момент пересечения им линии следования пешехода:
Время движения ТС до линии следования пешехода:
Путь пешехода за время t ‘а.н. при тех же условиях:
Условие безопасного перехода пешеходом полосы движения ТС:

Соблюдение данного условия указывает на то, что у водителя была техническая возможность предотвратить наезд на пешехода. Если бы водитель не запоздал с началом торможения, пешеход успел бы уйти из опасной зоны к тому моменту, когда ТС, двигаясь в заторможенном состоянии, приблизилось к линии следования пешехода.
Для определения, не запоздал ли водитель с торможением, расчет проводят следующим образом.
|
|
Время движения ТС до наезда:
Время движения пешехода:
Условие своевременного торможения, предпринятого водителем:
Выполнение этого условия означает, что водитель начал реагировать на пешехода либо в момент возникновения опасной обстаовки (t а.н = t п), либо раньше (t а.н > t п)-
С помощью приведенных уравнений можно также определить, мог ли водитель, применив своевременное экстренное торможение, остановиться до линии следования пешехода. Для этого определяют промежуток времени, просроченный водителем вследствие запоздания:
Перемещение ТС за этот промежуток времени (из положения I в положение II:

Условие остановки ТС до линии следования пешехода
Необходимо определить, нужно ли было тормозить в данной ситуации, могло ли ТС проехать мимо пешехода, не задев его, если бы водитель не тормозил, а продолжал бы движение с той же скоростью.
Условие безопасного проезда ТС с постоянной скоростью мимо пешехода:
или
Обычно при судебной экспертизе вариант проезда ТС с постоянной скоростью мимо пешехода не рассматривается, так как в ПДД для предотвращения ДТП рекомендовано снизить скорость или объехать препятствие. Однако в некоторых случаях маневр невозможен, а своевременное экстренное торможение ТС приводит к неизбежному наезду на пешехода. В этом случае обеспечить безопасность пешехода можно лишь проехав мимо него без сниовки скорости.
Рис. 2.3. Схема к определению удаления транспортного средства от места наезда на пешехода в момент возникновения опасной обстановки S уд. при замедленном движении транспортного средства и боковом ударе пешехода
Расчет наезда, при котором удар был нанесен боковой поверхностью ТС (рис. 2.3), проводится в той же последовательности, что и при фронтальном ударе, но расчетные формулы отличаются.
Перемещение ТС в заторможенном состоянии после пересечения линии следования пешехода:

Время движения пешехода в процессе ДТП
Полное время движения пешехода при данном варианте наезда больше времени его движения в поле зрения водителя t ‘п, так как ТС после пересечения линии следования пешехода переместилось на расстояние 1Х. Следовательно, удаление ТС от места наезда меньше перемещения ТС до наезда.
Формулы для расчета удаления ТС от места наезда принимают вид:
II.1.3. Наезд ТС на пешехода, перемещающегося в попутном или встречном направлении
Если при движении пешехода в попутном направлении (рис. 2.4) остановочный путь ТС So меньше расстояния конкретной видимости SB, можно сразу сделать вывод, что у водителя была техническая возможность предотвратить наезд на пешехода путем торможения. Если So > SB, исследования нужно продолжить.
|
|
При перемещении ТС со скоростью va (рис. 2.4, а) с момента обнаружения пешехода водителем пешеход пройдет путь S п со скоростью v п до наезда на него ТС.
Рис. 2.4. Схема к определению удаления транспортного средства от места наезда на пешехода в момент возникновения опасной обстановки S уд. при попутном движении транспортного средства и пешехода:
а – при наезде без торможения;
б – при наезде в процессе торможения;
S В – расстояние конкретной видимости.
Удаление ТС от места наезда в момент, когда водитель имел возможность обнаружить пешехода:

При наезде без торможения
Тогда
Откуда
При наезде в процессе торможения (рис. 2.4, б)
где t а – время движения ТС до места наезда:
v н – скорость наезда на пешехода.
Следовательно:

После преобразований:

При движении пешехода в попутном направлении остановка ТС для предотвращения наезда необязательна — достаточно лишь снизить скорость движения ТС до значения скорости движения пешехода, чтобы удара не произошло.
Сравнение остановочного пути ТС So с его удалением от места наезда Sya для определения технической возможности предотвратить наезд не всегда приводит к правильным выводам, поэтому исследования необходимо продолжить.
В момент возникновения опасной обстановки расстояние между ТС и пешеходом, движущимся в попутном направлении, составляет SB. При своевременном реагировании водителя на пешехода ТС за время Т переместится на расстояние vaT, а пешеход пройдет путь v п T. Затем ТС начнет двигаться с замедлением j, и в любой момент времени t, отсчитываемого от начала торможения, координаты ТС ха и пешехода хп следующие:

В момент наезда ха = хп, следовательно:
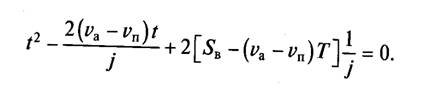
Откуда

где Δv = va – v п
Если в последнем уравнении подкоренное выражение отрицательно, уравнение имеет два комплексных корня – значит, ТС остановится, не догнав пешехода, и водитель может предотвратить наезд. Если подкоренное выражение равно нулю, уравнение имеет один корень – следовательно, скорости движения ТС и пешехода в момент контакта равны, и сила удара будет минимальна. Если подкоренное выражение положительно, имеются два действительных корня (практический смысл имеет меньшее из двух значений) – в этом случае эксперт может сделать вывод, что даже экстренное торможение не сможет предотвратить наезда, который произойдет через время Т + t после возникновения опасной обстановки.
В случае встречного движения (рис. 2.5)

При наезде без торможения (рис. 2.5, а)


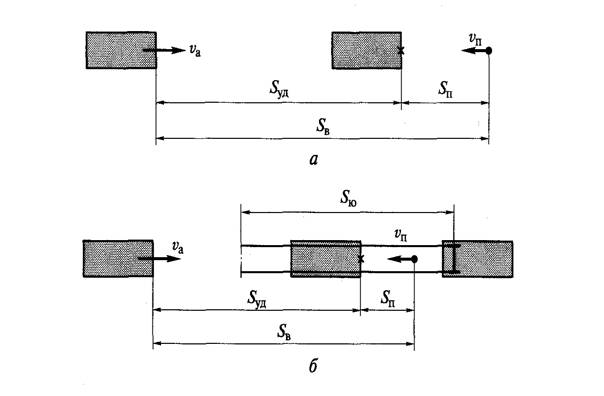
Рис. 2.5. Схема к определению удаления транспортного средства от места наезда на пешехода в момент возникновения опасной обстановки S уд при встречном движении транспортного средства и пешехода:
а – при наезде без торможения;
б – при наезде в процессе торможения
При наезде в процессе торможения (рис. 2.5, б)

Если при движении пешехода во встречном направлении величина остановочного пути So меньше удаления ТС от места наезда Sy д, можно сделать вывод, что водитель ТС имел техническую возможность предотвратить наезд на пешехода путем торможения. При этом пешеход должен тоже остановиться. Известны случаи, когда пешеход, набежав на остановившееся ТС, получал довольно серьезные травмы. Однако в таких случаях необходимо квалифицировать случившиеся не как ДТП, для которого характерно двиовки ТС, а как несчастный случай, подобный удару человека о стоящее дерево.
II.1.4. Наезд ТС на велосипедиста или мотоциклиста
Экспертное исследование наезда автомобиля на велосипедиста (мотоциклиста) производится в той же последовательности, что и исследование наезда на пешехода.
Условие пересечения велосипедистом полосы движения автомобиля при своевременном торможении, предпринятом водителем автомобиля:

где S ’в – путь равномерного движения велосипеда в случае экстренного затормаживания автомобиля;
L в – габаритная длина велосипеда (L в = 1,5… 1,9 м);
Ва – габаритная ширина автомобиля;
Δу – интервал между велосипедистом и границей опасной зоны;
Δб – интервал безопасности.
В то же время
где vB – скорость движения велосипеда;
tа.н. – время движения автомобиля до наезда на велосипедиста:
где v н – скорость наезда.
При попутном движении автомобиля и велосипеда (рис. 2.6, а) удаление автомобиля от места наезда

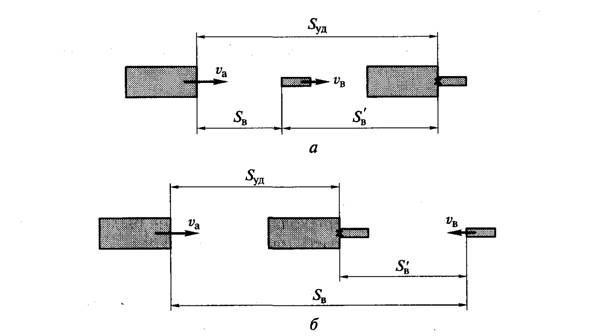
Рис. 2.6. Схема к определению удаления автомобиля от места наезда
на велосипедиста в момент возникновения опасной обстановки Sy д
при движении автомобиля без торможения:
а – при попутном движении автомобиля и велосипеда;
б – при встречном движении автомобиля и велосипеда;
S ' B – путь равномерного движения велосипеда в момент экстренного затормаживания автомобиля;
vB — скорость движения велосипеда;
Время движения велосипеда

При встречном движении автомобиля и велосипеда (рис. 2.6, б)
При замедленном движении автомобиля
где верхние знаки относятся к наезду автомобиля на велосипед, движущийся в попутном направлении, а нижние – во встречном.
Приведенные зависимости можно использовать при исследовании наезда автомобиля на мотоциклиста. Дальнейшие экспертные исследования наезда автомобиля на велосипедиста и мотоциклиста проводят так же, как и экспертные исследования наезда на пешехода.
|
|
|

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!