В настоящее время при создании цифровых автоматизированных систем возможна реализация двух подходов к созданию АСУ:
1. Использование централизованного управления на базе, как правило, многомашинной или многопроцессорной ЭВМ.
2. Использование распределенных децентрализованных микропроцессорных систем управления, содержащих устройство управления в каждом канале одномерной или многомерной системы.
В первом случае ЦУЭВМ используется для управления сложными объектами и реализует управление десятками динамических объектов или систем.
Как правило, управляющий комплекс резервируется для повышения надежности САУ. Структура СУ в рассмотренном случае имеет вид:

К1, К2-коммутаторы, ЗУ1-ЗУN – запоминающие устройства, ИМ1-ИМN – исполнительные механизмы, Д1-ДN – датчики выходных параметров объектов управления, П1-ПN – АЦП- преобразователи. Примечание: ЦАП преобразователи на рис. не показаны.
Система содержит:
• Ряд входных АЦП преобразователей П1-ПN, преобразующих сигнал с аналоговых датчиков для поступления на коммутатор К1.
• Управление коммутаторами К1, К2 (мультиплексорами) осуществляется по команде ЦУЭВМ.
Сформированное управляющее воздействие ЦУЭВМ для каждого канала запоминается на запоминающих устройствах ЗУ1-ЗУN на весь интервал квантования по времени для обслуживания контура управления.
Управляющее воздействие U1-Un в течение интервала квантования поступают на исполнительные механизмы ИМ1-Имn пропорционального или интегрирующего типов, что требует формирование управляющих воздействий U1-Un либо в полных переменных, либо в приращениях.
На рисунке не показаны АЦП и ЦАП, которые с определенной точностью преобразуют аналоговый сигнал в цифровой и цифровой в аналоговый. Чем выше разрядность АЦП и ЦАП, тем более точно обрабатываются сигналы.
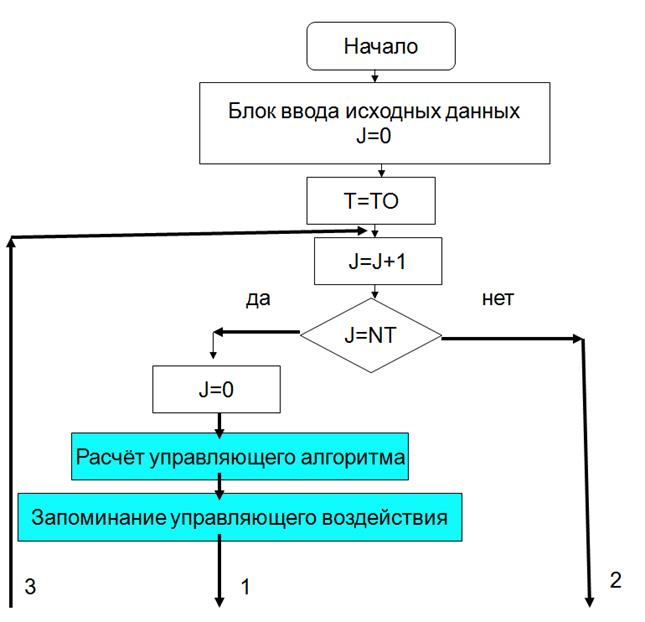
Алгоритм моделирования цифровых САУ с учетом квантования по времени.
Рассмотрим методику моделирования цифровых систем управления с учетом формирования управления.
В простейшем случае за один шаг модельного времени примем:
параметр NT – интервал времени в шагах моделирования для расчета Tk,
j – счетчик для оценки временного интервала квантования.
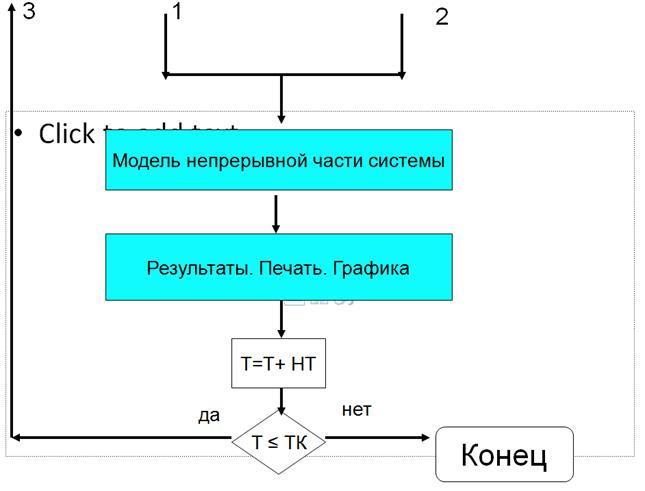
Модель состоит из двух частей:
1. Формирования расчета управляющего воздействия с учетом квантования по времени.
Модели моделирования квазинепрерывной части системы
Пример моделирования цифровой САУ автопилота самолета с управляющей ЭВМ.
ТЕМА 6
Моделирование цифровых систем управления самолетом. ПРИМЕР.
Рассмотрим структурную схему цифровой системы управления автопилотом самолета с учетом нелинейных составляющих.
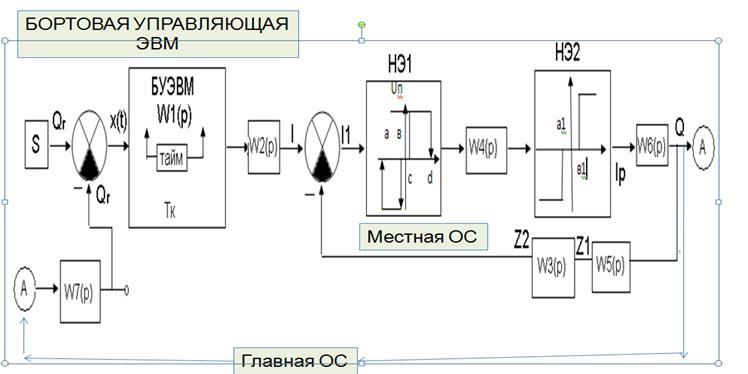
• Система управления содержит задатчик курса S, формирующий заданное значение курса самолета Qзадг .
• Блок сравнения формирует сигнал ошибки x(t) как разность между заданным значением и измеренным значением
• x(t) = Qзадг - Qг где Qг – измеренное значение курса.
Схема включает бортовую управляющую машину БУЭВМ, которая реализует дискретный алгоритм управления, для формирования управляющего воздействия на
Интервале квантования Тк, где U(t) – управляющее воздействие на исполнительные устройства самолета. Таймер УЭВМ с интервалом квантования Тк реализует подключение ЭВМ с помощью АЦП и ЦАП.
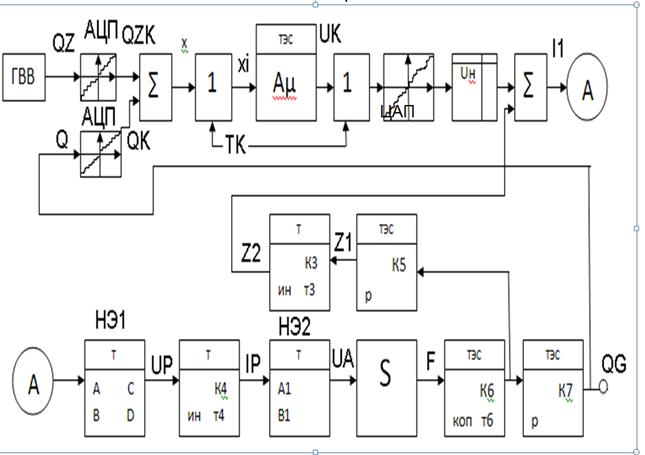
На основании анализа динамических свойств конкретных элементов входящих в систему управления получены следующие передаточные функции элементов:

• При программировании реальной модели системы необходимо моделировать линейную часть системы (инерционные звенья), например, методом Эйлера или модифицированным методом Эйлера.
• Колебательные звенья приводятся к системам дифференциальных уравнений первого порядка и решаются методом Рунге-Кутта.
ТЕМА 7






