Для построения аналитических моделей имеется мощный математический аппарат (алгебра, функциональный анализ, разностные уравнения, теория вероятностей, математическая статистика, теория массового обслуживания и т. д.). Наличие математического аппарата и относительная быстрота и легкость получения информации о поведении СС способствовали повсеместному и успешному распространению аналитических моделей в различных областях науки и техники.
В имитационной модели поведение компонент СС описывается набором алгоритмов, которые затем реализуют ситуации, возникающие в реальной системе.
Моделирующие алгоритмы позволяют по исходным данным, содержащим сведения о начальном состоянии СС, и фактическим значениям параметров системы отобразить реальные явления в системе и получить сведения о возможном поведении СС для данной конкретной ситуации.
На основании этой информации исследователь может принять соответствующие решения. Отметим при этом, что предсказательные
Моделирование
Искусство построения истинных или ложных (по соответствию физической природе) моделей систем.Совокупность действий по созданию модели реальной системы, последующая цель которых – изучение природы системы, возможностей ее структурного развития или прогнозирование поведения. Симуляция движения. Процесс движения координат модели, направленный на получение адекватных результатов.Проблематика, задачи и цели моделирования В теории моделирования основными являются проблемы:
разработки универсальных подходов к построению моделей, точности симуляции движения их координат,
оценки величин погрешностей,
адекватности получаемых результатов,
идентификации изучаемых систем,
синтеза технических устройств и гипотез.
Задачи общей теории моделирования заключаются в решении перечисленных проблем. При поиске решений используются:
Методы теории подобия
Методы теории расчета цепей
Методы теории систем автоматического управления
Численные методы
Глобальными целями моделирования являются вопросы изучения природы систем, возможностей их структурного развития и прогнозирование поведения.
Технологии функционирования моделирующих программ
Каждая из программ математического моделирования динамических систем основана на одной из двух технологий:
Первая технология предполагает использование поточной модели управления при выполнении математических преобразований (функций) составляющих модель.
Вторая технология предполагает представление модели в виде текстовой записи системы уравнений, которую решатели моделирующих программ обрабатывают в пакетном режиме.
Поточная модель управления (Data Flow). Модель программирования, в которой инструкции, процедуры или функции выполняются только тогда, когда все входные данные (т.е. параметры и аргументы) готовы.
Понятие о моделях. Основные определения. (лк №1)
Существует множество толкований основных определений таких понятий, как имитационная модель, компоненты и параметры модели, функциональные зависимости, ограничения, целевые функции моделирования.
Основные определения (по Р. Шеннону) Модель (лат. modulus — мера) — это объект-заместитель объекта-оригинала, обеспечивающий изучение некоторых свойств оригинала.
Каждая модель представляет собой некоторую комбинацию таких составляющих, как
Компоненты,
Переменные,
Параметры,
Функциональные зависимости,
Ограничения,
Целевые функции.
Параметрами являются величины, которые исследователь может выбирать произвольно, в отличие от переменных модели, которые могут принимать только значения, определяемые видом данной функции.
В модели системы будем различать переменные двух видов — экзогенные и эндогенные. Экзогенные переменные называются также входными.
Это означает, что они порождаются вне системы или являются результатом взаимодействия внешних причин. Эндогенными переменными называются переменные, возникающие в системе в результате воздействия внутренних причин.

Моделирование САУ
Сложность современных объектов проектирования и СУ, постоянно растущие требования к обеспечению динамически точных систем, высокая цена ошибки проектных решений входят в противоречие с традиционными подходами синтеза САУ. Выходом из данного положения является создание инструментов для проведения структурного и параметрического синтеза с учетом нелинейностей, присуще реализации системы и учета особенностей введения ЦСУ.
Введение
При исследовании САУ решаемые задачи обеспечения заданных показателей качества переходных процессов, а именно быстродействия, заданной колебательности и заданного перерегулирования. Показатели качества, полученные на И.М., на основе анализа переходных процессов называют прямыми показателями качества.
Качество переходного процесса может быть оценено при воздействии ступенчатой функции, при гармоничных воздействиях, в установленном режиме, с помощью различных интегральных критериях, частотной методики оценки качества.
Пример моделирования САУ программным методом. (лк2 18-20)
Рассмотрим пример моделирования САУ, структурная схема которой имеет вид:
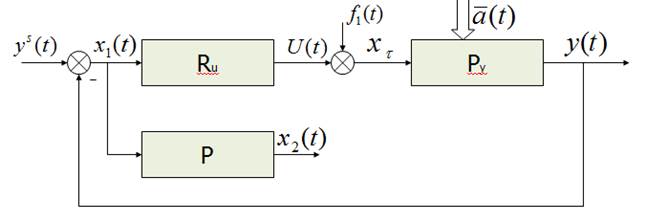
 - задающее воздействие;
- задающее воздействие;
 - сигнал ошибки и его производная;
- сигнал ошибки и его производная;
f(t) - координатное возмущение;
 - - управляющее воздействие;
- - управляющее воздействие;
 - параметрические возмущения;
- параметрические возмущения;
 - управляемая координата;
- управляемая координата;
 - оператор УУ;
- оператор УУ;
 - оператор ОУ;
- оператор ОУ;
Пример моделирования цифровой САУ автопилота самолета с управляющей ЭВМ.
ТЕМА 6
Моделирование цифровых систем управления самолетом. ПРИМЕР.
Рассмотрим структурную схему цифровой системы управления автопилотом самолета с учетом нелинейных составляющих.
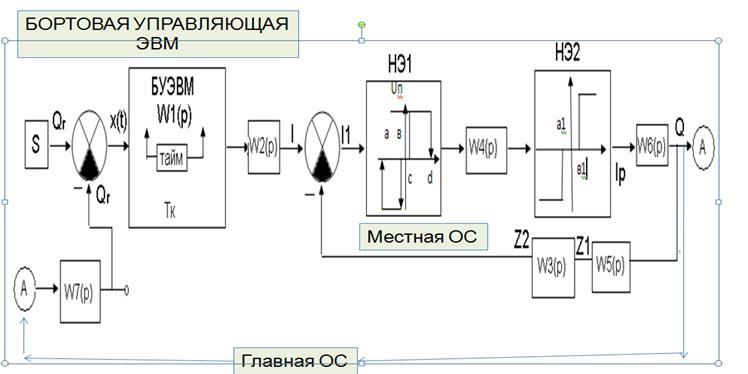
• Система управления содержит задатчик курса S, формирующий заданное значение курса самолета Qзадг .
• Блок сравнения формирует сигнал ошибки x(t) как разность между заданным значением и измеренным значением
• x(t) = Qзадг - Qг где Qг – измеренное значение курса.
Схема включает бортовую управляющую машину БУЭВМ, которая реализует дискретный алгоритм управления, для формирования управляющего воздействия на
Интервале квантования Тк, где U(t) – управляющее воздействие на исполнительные устройства самолета. Таймер УЭВМ с интервалом квантования Тк реализует подключение ЭВМ с помощью АЦП и ЦАП.
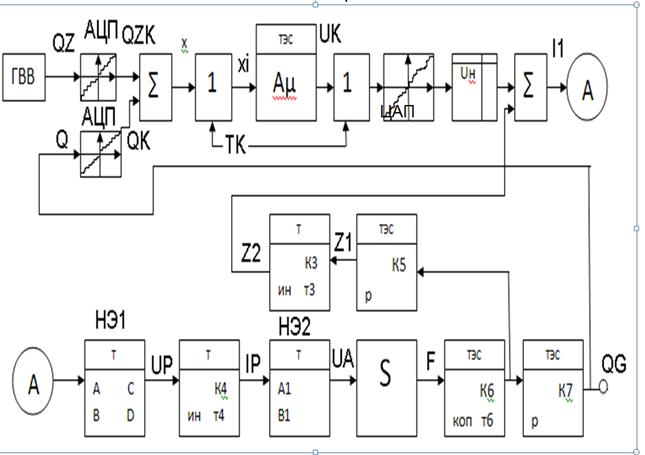
На основании анализа динамических свойств конкретных элементов входящих в систему управления получены следующие передаточные функции элементов:

• При программировании реальной модели системы необходимо моделировать линейную часть системы (инерционные звенья), например, методом Эйлера или модифицированным методом Эйлера.
• Колебательные звенья приводятся к системам дифференциальных уравнений первого порядка и решаются методом Рунге-Кутта.
ТЕМА 7
ТЕМА 8
ТЕМА 9
ТЕМА 10
ВВЕДЕНИЕ
1. Постановка задач на моделирование и анализ динамических свойств параметрических систем управления.
Рассмотрим методы управления возмущёнными движениями линейных динамических систем при отсутствии возмущений координатного типа (внешних воздействий) на входе объекта управления.
Проведём синтез и анализ алгоритмов управления существенно нестационарными динамическими системами (объектами) параметры которых с течением времени (или мгновенно) могут изменяться неконтролируемым образом в любых ограниченных пределах, причём к характеру изменения параметров системы (объекта) предъявляются требования достаточно общего вида.
• Функционально-алгоритмическая структура
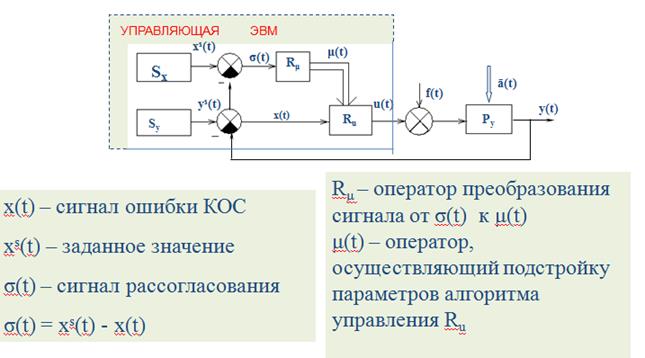
• Если координатно-операторной обратной связью дополнить структурную схему системы с КОС, то получим структурную схему (рис.1.1), наглядно представляющую использование принципа обратной связи при формировании оператора алгоритма управления Ru
• В этом случае система с КОС выступает в качестве звена координатно-операторного типа Pх и выполняет в контуре координатно-операторной обратной связи роль объекта управления.
• Здесь приняты следующие обозначения:
• Sx - задатчик динамических свойств контура КООС,
• xs(t) - задающее воздействие для сигнала ошибки,
• s (t) – рассогласование сигнала ошибки,
• Rµ - оператор КООС,
• µ(t) - операторная переменная для подстройки оператора алгоритма управления,
• ys(t )- задающее воздействие основного контура,
х1(t )- сигнал ошибки контура КОС.
• В терминах теории автоматического управления изменение параметров системы во времени можно интерпретировать как влияние возмущений параметрического типа.
• Тогда задачу управления нестационарной системой (ограничения влияний неизмеряемых параметрических возмущений) можно рассматривать как задачу компенсации их влияния на свойства замкнутой САУ.
• Т.е. решается задача компенсации изменения параметров управляемой системы (объекта) за счёт соответствующей постройки (адаптации) параметров алгоритма управления.
Основными свойством управляемой системы в целом будем считать свойства экспоненциальной устойчивости системы при параметрических возмущениях и обеспечения заданных динамических свойств после подстройки алгоритма управления.
Систему управления, использующую КОС и КООС, будем именовать системой Sµ, а соответствующий ей алгоритм управления - Аµ -алгоритмом, операторные переменные будем показывать двойной стрелкой.

• На выбор алгоритмов управления решающие воздействие оказывают требования к формированию управляющего воздействия, как правило эти воздействия должны быть кусочно-постоянными функцими времени.
Требуется не использовать значительных переключений исполнительного устройства управления за исключением задач управления объектами, которые завершают функционирование с заданным, относительно коротким периодом времени (например ракетные системы).
2. Структура системы управления с координатно-операторной обратной связью (КООС).
• Если в номинальном режиме при неизменных параметрах объекта управления происходит параметрическое возмущение, то при отклонении ошибки Х (t) от заданного значения Xs(t) формируется автоматически сигнал оператора μ(t), который подстраивает параметры настройки алгоритма управления.
• Если произошло изменение параметров объектов управления, то операторная переменная μ(t) несёт информацию о возникающих параметрических возмущениях, поэтому её целесообразно использовать для коррекции сигнала Xs(t) на выходе задатчика динамических свойств системы по сигналу ошибки.
3. Структура системы управления с КООС и операторной обратной связью (ООС).

ТЕМА 11
ТЕМА 12
Введение.
Для построения аналитических моделей имеется мощный математический аппарат (алгебра, функциональный анализ, разностные уравнения, теория вероятностей, математическая статистика, теория массового обслуживания и т. д.). Наличие математического аппарата и относительная быстрота и легкость получения информации о поведении СС способствовали повсеместному и успешному распространению аналитических моделей в различных областях науки и техники.
В имитационной модели поведение компонент СС описывается набором алгоритмов, которые затем реализуют ситуации, возникающие в реальной системе.
Моделирующие алгоритмы позволяют по исходным данным, содержащим сведения о начальном состоянии СС, и фактическим значениям параметров системы отобразить реальные явления в системе и получить сведения о возможном поведении СС для данной конкретной ситуации.
На основании этой информации исследователь может принять соответствующие решения. Отметим при этом, что предсказательные
Моделирование
Искусство построения истинных или ложных (по соответствию физической природе) моделей систем.Совокупность действий по созданию модели реальной системы, последующая цель которых – изучение природы системы, возможностей ее структурного развития или прогнозирование поведения. Симуляция движения. Процесс движения координат модели, направленный на получение адекватных результатов.Проблематика, задачи и цели моделирования В теории моделирования основными являются проблемы:
разработки универсальных подходов к построению моделей, точности симуляции движения их координат,
оценки величин погрешностей,
адекватности получаемых результатов,
идентификации изучаемых систем,
синтеза технических устройств и гипотез.
Задачи общей теории моделирования заключаются в решении перечисленных проблем. При поиске решений используются:
Методы теории подобия
Методы теории расчета цепей
Методы теории систем автоматического управления
Численные методы
Глобальными целями моделирования являются вопросы изучения природы систем, возможностей их структурного развития и прогнозирование поведения.






