Введение
При исследовании автоматических систем приходится решать две задачи: анализа и синтеза.
Задача анализа
По заданной схеме следящей САУ требуется рассчитать переходные процессы, возникающие в ней и оценить её устойчивость.
Задача синтеза
По заданным переходным процессам и их основным показателям надо найти систему управления, которая реализует эти заданные процессы.
Обе задачи имеют много общего и в значительной мере связаны друг с другом. Однако вторая задача существенно сложнее первой. Трудности решения задачи синтеза проистекают от нескольких причин.
Решение задачи синтеза не является однозначным, т.к. одни и те же требования, предъявляемые к САУ, можно удовлетворить различными путями. Или иначе, имеется множество САУ (в общем случае имеющие даже различные физические принципы работы) с помощью которых можно реализовать заданные переходные характеристики.
К виду переходного процесса могут предъявляться различные требования, и эти требования могут противоречить друг другу. Поэтому при выборе структуры и параметров проектируемой системы возникает необходимость компромиссного решения задачи, что усложняет решение задач вопросов синтеза. Может оказаться, что расчетная схема системы технически неосуществима.
В силу указанных причин при синтезе систем автоматики часто ставятся ограничения, что облегчает решение задачи синтеза.
Обычно считается, что определенная часть системы задана (что на практике, как правило, и имеет место). Применительно к заданной неизменяемой части САУ требуется выбрать общую структурную схему и значения параметров дополнительной части системы. Естественно, что дополнительная изменяемая часть системы должна быть технически осуществима.
Нередко задача синтеза сужается еще больше. Так, например, при заданной основной схеме регулирования дополнительная (изменяемая, корректирующая) часть схемы, вследствие ее простой технической осуществимости, должна состоять только из каких-либо стандартных дополнительных корректирующих элементов. Например, в электрических системах — из пассивных четырехполюсников. Поэтому в таких довольно частых случаях, ограничиваются лишь определением вида и параметров дополнительной (корректирующей или стабилизирующей) части схемы, которая в сочетании с основной частью системы обеспечивала бы требуемые динамические характеристики системы в целом.
Иначе говоря, чаще всего рассматривают не синтез систем в целом, а лишь синтез корректирующих устройств, входящих в их состав.
Именно эта задача и решается в данном курсовом проекте.
Решение задачи синтеза распадается на два основных этапа.
На первом этапе по заданным показателям качества регулирования ищут либо передаточную функцию, либо частотную функцию, либо дифференциальные уравнения корректирующей цепи, при которой реализуется заданные показатели качества.
Второй этап — нахождение по определенной на первом этапе передаточной функции (или частотной функции) схемы корректирующей цепи.
1. Исходные данные и технические требования к системе
Исходные данные САУ
В дальнейшем конкретные расчеты будут выполнены для следующего примерного варианта:
kc = 1,5 В/град — коэффициент усиления сельсина;
kv = 4 — коэффициент усиления усилителя;
Т v = 0,1 с — постоянная времени усилителя;
kде =23 рад/(с*В) — коэффициент усиления двигателя;
Тде = 0,14 с — постоянная времени двигателя;
ip = 200 — коэффициент передачи редуктора (размерность ip — если на входе - угловая скорость, а на выходе -градусы, то будет 1/с; если просто отношение оборотов первичного и вторичного валов — безразмерная величина).
Технические требования к системе
n вх = 4,8 об/мин — номинальная скорость вращения входного вала;
ξv = 1,5 град — скоростная ошибка;
tp = 1,8 с — время регулирования;
σ = 40% — перерегулирование.
Структурная схема САУ
Функциональная схема системы, которую необходимо синтезировать приведена на рис. 1.
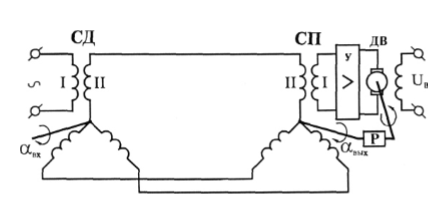
СД — сельсин-датчик;
СП — сельсин-приемник;
I — обмотки статора СД и СП;
II — обмотки ротора СД и СП;
Р — редуктор; преобразует быстрое вращение двигателя в медленное, но с большим усилием;
У - усилитель;
ДВ - двигатель.
Рис. 1. Функциональная схема следящей системы
Структурную схему САУ получаем в соответствии с рис. 1, исходя из следующих соображений.
Сельсин рассматриваем как линейный усилитель с коэффициентом усиления k с = 10,3 В град.
Передаточная функция сельсина, рассматриваемого как пропорциональное (безынерционное) звено:
Wc (p)= kc
Усилитель У представляет собой апериодическое (инерционное) звено с передаточной функцией

где
k у — коэффициент усиления усилителя;
Т y, — постоянная времени усилителя.
Двигатель ДБ представляет собой интегрирующее инерционное звено с передаточной функцией
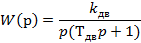
где
k дв — коэффициент усиления двигателя;
Тдв — постоянная времени двигателя.
Получен как передаточная функция интегрирующего и инерционного (апериодического) звеньев, включенных последовательно.
Передаточная функция редуктора Р. рассматриваемого как пропорциональное (безынерционное) звено:

где
ip - коэффициент передачи редуктора.
Структурная схема САУ в соответствии с рис. 1 приведена на рис. 2.
На рисунке:
a вх — угол поворота СД (первичного вала);
 a выч — угол поворота СП (вторичного вала);
a выч — угол поворота СП (вторичного вала);
элемент сравнения (нижний сектор черный, т.к. обратная связь - отрицательная);
Wc (p) — пропорциональное (безынерционное) звено (передаточная функция сельсина);
Wy (p) — апериодическое (инерционное) звено (передаточная функция усилителя):
W дв (p) — интегрирующее инерционное звено (передаточная функция двигателя);
Wp (p) — пропорциональное (безынерционное) звено (передаточная функция редуктора).

Рис. 2. Структурная схема САУ
Имеем структурную схему следящей системы с единичной обратной связью. Так как Wc (p), Wy (p), W дв (p), Wp (p) включены последовательно, то можно все эти звенья заменить одним звеном с передаточной функцией
W н (p) = Wc (p)͘* Wy (p)* W дв (p)* w Wp (p).
Получим эквивалентную структурную схему неизменяемой части следящей системы, изображенной на рис. 3.
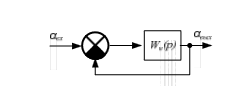
Рис. 3. Эквивалентная структурная схема неизменяемой части САУ



где  – коэффициент передачи неизменяемой части системы.
– коэффициент передачи неизменяемой части системы.
Для того чтобы, провести вычисления в одинаковых единицах измерения, необходимо k дв умножить на множитель 180/π.
Для рассматриваемого примера

Теперь найдем передаточную функцию замкнутой системы Wз(p). На рис. 3 приведена схема следящей системы с единичной обратной связью. Передаточная функция такой системы:
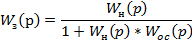
Если Woc=1 (т.е. в цепи обратной связи нет звеньев), то
Окончательно для замкнутой систему можно записать:

Таким образом, выражение Wз(p) является передаточной функцией замкнутой системы регулирования. Выражение в знаменателе  – определяет характеристическое уравнение системы.
– определяет характеристическое уравнение системы.
Предварительное определение устойчивости проектируемой системы
Предварительный расчет устойчивости системы проведем с помощью алгебраического критерия устойчивости Н.А. Вышнеградского.
Характеристический полином замкнутой системы регулирования имеет вид:

По критерию устойчивости Н.А. Вышнеградского, если характеристический полином имеет вид: 
; то система 3-го порядка устойчива, если:
1. ао> 0, а 1 >0, а 2 > 0, a3 > 0,
2. а 1 а 2 > ао a3
В рассматриваемом случае,




Тогда ( Tдв +Ту)*1 > Tдв Ту kн.
(0,1+0,14)1 > 0,1* 0,14*39,5:
0,24 > 0,553.
Следовательно, проектируемая система не устойчива.
Построение желаемой ЛАЧХ
Желаемая ЛАЧХ разомкнутой системы строится исходя из требований, предъявляемых к системе, и по основным показателям качества: требуемый коэффициент усиления (определяемый желаемой точностью ее работы): желаемый порядок астатизма системы (число интегрирующих звеньев или кратность нулевого корня в характеристическом уравнении разомкнутой системы), допустимое время переходного процесса tp, требуемый запас устойчивости по фазе (определяется величиной перерегулирования, σ).
Желаемую ЛАЧХ (рис. 7) условно разделяют на 3 части: низкочастотную. среднечастотную и высокочастотную.
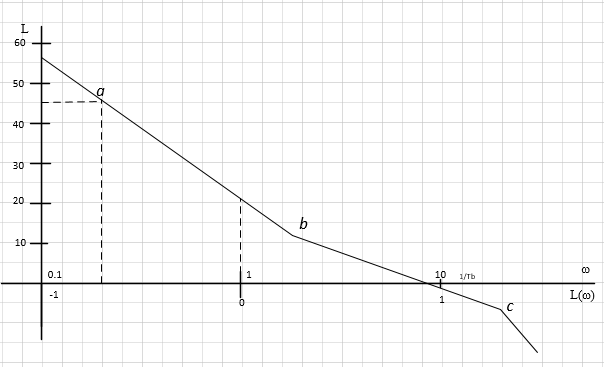
Рис. 7. Желаемая ЛАЧХ разомкнутой системы.
Для построения L ж (ω) надо знать частоту среза ωср, координату определяющую положение точек b и с. коэффициент усиления разомкнутой нескорректированной системы и наличие астатизма у системы. Низкочастотная часть проводится через точку а с ординатой 201gk, где к - коэффициент нескорректированной разомкнутой системы.
ωз ≈ (2 - 4) ωср и ω2 = ωср2 / ω3,
ωср 3,5 П /1,8=6,11с; ω2 = 6,112 /12,22=3,06, ωз ≈ 2 *6,11=12,22
Значение ωср определяют по номограмме (рис. 8, а).
По заданному значению перерегулирования σ по кривой σ (Ртао) номограммы определяют соответствующие значения Ртах. Затем по значению Ртах по кривой tp (Pmax) определяют значение СП/ ωср . Это значение приравнивают заданному значению времени регулирования tp и из полученного равенства определяют частоту среза ωср = СП/ tp
Это значение и наносят на характеристику (см. рис. 8).
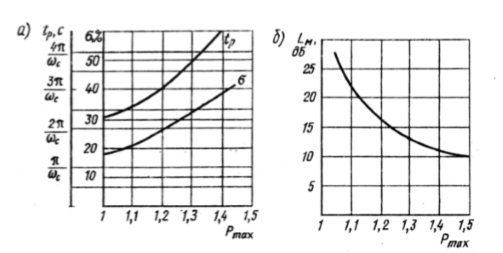
Рис.8. Номограммы для определения параметров среднечастотной
части желаемой ЛАЧХ
Ордината L M при заданном значении перерегулирования о определяется по номограммам (рис. 8, б). Заданы показатели качества регулирования - длительность регулирования tp =1,8 си перерегулирование σ =40%. Тогда по рис. 8, а при σ =40% определим Ртах=1,4,
tp =2,8П/ ωср. По выражению 2,8П/ ωср = tp =1,8 рассчитаем частоту среза ωср =4,2 с*1. Значение L M =12,46 дБ определим по кривым (см. рис. 13) при полученном σ =1,42. Частота среза ωср и значение L M определим ориентировочно. Проведем среднечастотную асимптоту желаемой ЛАЧХ Lж (ω) через точку ωдв с наклоном минус 20 дБ/дек, до пересечения с горизонтальными прямыми L. y выше и ниже оси абсцисс (см. точки Ь и с). Среднечастотная асимптота желаемой ЛАЧХ сопрягается с низкочастотной, проходящей с наклоном минус 40дБ/дек в точке Ь. Высокочастотная асимптота в точке с совпадает с асимптотой неизменяемой ЛАЧХ, проходящей с наклоном минус 60 дБ/дек.
Заключение
В данном курсовом проекте, нами была скорректирована и проверена на устойчивость САУ. Для этого был выполнен расчет передаточной функции, расчет необходимого коэффициента передачи системы, предварительный расчет устойчивости системы с помощью критерия Вышнеградского, построена ЛАЧХ неизменяемой, желаемой и по ним корректирующего звена. Были построены ЛФЧХ, переходная функции данной системы. По переходной характеристике скорректированной системы, были определены фактические показатели качества: время регулирования tр, относительное перерегулирование σ, частоту колебаний ω (период колебаний Т), число колебаний N за время регулирования.
Устойчивость была определена по критериям Вышнеградского, Найквиста, Михайлова, Гурвица.
Библиографический список
1. Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические основы железнодорожной автоматики и телемеханики: М: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2008. -394 с.
2. Кравцов Ю.А., Архипов Е.В., Антонов А.А. Синтез следящей системы автоматического управления: М: МИИТ, 2010. 53 с.
Введение
При исследовании автоматических систем приходится решать две задачи: анализа и синтеза.
Задача анализа
По заданной схеме следящей САУ требуется рассчитать переходные процессы, возникающие в ней и оценить её устойчивость.
Задача синтеза
По заданным переходным процессам и их основным показателям надо найти систему управления, которая реализует эти заданные процессы.
Обе задачи имеют много общего и в значительной мере связаны друг с другом. Однако вторая задача существенно сложнее первой. Трудности решения задачи синтеза проистекают от нескольких причин.
Решение задачи синтеза не является однозначным, т.к. одни и те же требования, предъявляемые к САУ, можно удовлетворить различными путями. Или иначе, имеется множество САУ (в общем случае имеющие даже различные физические принципы работы) с помощью которых можно реализовать заданные переходные характеристики.
К виду переходного процесса могут предъявляться различные требования, и эти требования могут противоречить друг другу. Поэтому при выборе структуры и параметров проектируемой системы возникает необходимость компромиссного решения задачи, что усложняет решение задач вопросов синтеза. Может оказаться, что расчетная схема системы технически неосуществима.
В силу указанных причин при синтезе систем автоматики часто ставятся ограничения, что облегчает решение задачи синтеза.
Обычно считается, что определенная часть системы задана (что на практике, как правило, и имеет место). Применительно к заданной неизменяемой части САУ требуется выбрать общую структурную схему и значения параметров дополнительной части системы. Естественно, что дополнительная изменяемая часть системы должна быть технически осуществима.
Нередко задача синтеза сужается еще больше. Так, например, при заданной основной схеме регулирования дополнительная (изменяемая, корректирующая) часть схемы, вследствие ее простой технической осуществимости, должна состоять только из каких-либо стандартных дополнительных корректирующих элементов. Например, в электрических системах — из пассивных четырехполюсников. Поэтому в таких довольно частых случаях, ограничиваются лишь определением вида и параметров дополнительной (корректирующей или стабилизирующей) части схемы, которая в сочетании с основной частью системы обеспечивала бы требуемые динамические характеристики системы в целом.
Иначе говоря, чаще всего рассматривают не синтез систем в целом, а лишь синтез корректирующих устройств, входящих в их состав.
Именно эта задача и решается в данном курсовом проекте.
Решение задачи синтеза распадается на два основных этапа.
На первом этапе по заданным показателям качества регулирования ищут либо передаточную функцию, либо частотную функцию, либо дифференциальные уравнения корректирующей цепи, при которой реализуется заданные показатели качества.
Второй этап — нахождение по определенной на первом этапе передаточной функции (или частотной функции) схемы корректирующей цепи.
1. Исходные данные и технические требования к системе
Исходные данные САУ
В дальнейшем конкретные расчеты будут выполнены для следующего примерного варианта:
kc = 1,5 В/град — коэффициент усиления сельсина;
kv = 4 — коэффициент усиления усилителя;
Т v = 0,1 с — постоянная времени усилителя;
kде =23 рад/(с*В) — коэффициент усиления двигателя;
Тде = 0,14 с — постоянная времени двигателя;
ip = 200 — коэффициент передачи редуктора (размерность ip — если на входе - угловая скорость, а на выходе -градусы, то будет 1/с; если просто отношение оборотов первичного и вторичного валов — безразмерная величина).
Технические требования к системе
n вх = 4,8 об/мин — номинальная скорость вращения входного вала;
ξv = 1,5 град — скоростная ошибка;
tp = 1,8 с — время регулирования;
σ = 40% — перерегулирование.
Структурная схема САУ
Функциональная схема системы, которую необходимо синтезировать приведена на рис. 1.
СД — сельсин-датчик;
СП — сельсин-приемник;
I — обмотки статора СД и СП;
II — обмотки ротора СД и СП;
Р — редуктор; преобразует быстрое вращение двигателя в медленное, но с большим усилием;
У - усилитель;
ДВ - двигатель.
Рис. 1. Функциональная схема следящей системы
Структурную схему САУ получаем в соответствии с рис. 1, исходя из следующих соображений.
Сельсин рассматриваем как линейный усилитель с коэффициентом усиления k с = 10,3 В град.
Передаточная функция сельсина, рассматриваемого как пропорциональное (безынерционное) звено:
Wc (p)= kc
Усилитель У представляет собой апериодическое (инерционное) звено с передаточной функцией
где
k у — коэффициент усиления усилителя;
Т y, — постоянная времени усилителя.
Двигатель ДБ представляет собой интегрирующее инерционное звено с передаточной функцией
где
k дв — коэффициент усиления двигателя;
Тдв — постоянная времени двигателя.
Получен как передаточная функция интегрирующего и инерционного (апериодического) звеньев, включенных последовательно.
Передаточная функция редуктора Р. рассматриваемого как пропорциональное (безынерционное) звено:
где
ip - коэффициент передачи редуктора.
Структурная схема САУ в соответствии с рис. 1 приведена на рис. 2.
На рисунке:
a вх — угол поворота СД (первичного вала);
a выч — угол поворота СП (вторичного вала);
элемент сравнения (нижний сектор черный, т.к. обратная связь - отрицательная);
Wc (p) — пропорциональное (безынерционное) звено (передаточная функция сельсина);
Wy (p) — апериодическое (инерционное) звено (передаточная функция усилителя):
W дв (p) — интегрирующее инерционное звено (передаточная функция двигателя);
Wp (p) — пропорциональное (безынерционное) звено (передаточная функция редуктора).
Рис. 2. Структурная схема САУ
Имеем структурную схему следящей системы с единичной обратной связью. Так как Wc (p), Wy (p), W дв (p), Wp (p) включены последовательно, то можно все эти звенья заменить одним звеном с передаточной функцией
W н (p) = Wc (p)͘* Wy (p)* W дв (p)* w Wp (p).
Получим эквивалентную структурную схему неизменяемой части следящей системы, изображенной на рис. 3.
Рис. 3. Эквивалентная структурная схема неизменяемой части САУ
где – коэффициент передачи неизменяемой части системы.
Для того чтобы, провести вычисления в одинаковых единицах измерения, необходимо k дв умножить на множитель 180/π.
Для рассматриваемого примера
Теперь найдем передаточную функцию замкнутой системы Wз(p). На рис. 3 приведена схема следящей системы с единичной обратной связью. Передаточная функция такой системы:
Если Woc=1 (т.е. в цепи обратной связи нет звеньев), то
Окончательно для замкнутой систему можно записать:
Таким образом, выражение Wз(p) является передаточной функцией замкнутой системы регулирования. Выражение в знаменателе – определяет характеристическое уравнение системы.
Определение минимально допустимого коэффициента передачи данных
ТЕОРЕМА. О конечном значении ошибки в установившемся режиме.
Если на входе присутствует некоторое воздействие Х(р), то ошибка в установившемся режиме определяется как предел следующего выражения:

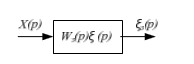
Рис. 4. Звено, характеризующее ошибку в установившемся режиме
Найдем первичную функцию по ошибке:


ξ=∆ a.
Рассмотрим установившиеся ошибки на выходе системы при двух видах воздействия.
Единичная функция
a вх=1(t);


Воздействие на входе изменяется с постоянной скоростью
a вх= V*t;
где V - заданная скорость вращения входного вата (пех).
По заданию пе x = V = 50 об/мин. Необходимо её перевести в гра/с, т.е. определить угол, на который повернется входной ват за 1 с.



Из теории известна связь между скоростной ошибкой ξ v со скоростью изменения входной величины V, в данном случае скоростью вращения входного вала об/мин, и коэффициентом усиления разомкнутой системы.

где ξ v — скоростная ошибка (задано = 1.5 град).
V — скорость изменения входной величины. В данном случае речь идет о скорости вращения первичного (входного) вала пех.
Поэтому V = пех. В задании: пех = 4.8 об/мин = 4.8*360/60 = 28.8 град/с.
Таким образом, минимальное значение коэффициента усиления разомкнутой системы, при котором выполняется требуемый показатель качества ξ v — 1,5 град, при скорости вращения входного вала 4,8 об/мин = 28,8 град/с:
 ; по расчету kн = 39,5.
; по расчету kн = 39,5.
Т.к. kmin <k н, то подключение дополнительного усилителя не требуется. Если бы расчетный k н получился меньше, чем минимально допустимый, то надо было бы увеличить k y и k с или просто ввести в функциональную схему еще одно пропорциональное звено.
Предварительное определение устойчивости проектируемой системы
Предварительный расчет устойчивости системы проведем с помощью алгебраического критерия устойчивости Н.А. Вышнеградского.
Характеристический полином замкнутой системы регулирования имеет вид:
По критерию устойчивости Н.А. Вышнеградского, если характеристический полином имеет вид:
; то система 3-го порядка устойчива, если:
1. ао> 0, а 1 >0, а 2 > 0, a3 > 0,
2. а 1 а 2 > ао a3
В рассматриваемом случае,
Тогда ( Tдв +Ту)*1 > Tдв Ту kн.
(0,1+0,14)1 > 0,1* 0,14*39,5:
0,24 > 0,553.
Следовательно, проектируемая система не устойчива.





