Под действием внешних сил при движении механизма в кинематических парах возникают реактивные силы (реакции). Схема нагружения механизма представлена на рис. 3.12, а. Помимо сил сопротивления или движущих сил, на звенья механизма действуют: сила тяжести Gi, главный вектор сил инерции Fиi и главный момент сил инерции T и i , приложенные к центру тяжести S 2.
Главный момент сил инерции T и i звена по направлению всегда противоположен угловому ускорению e i звена, т. е. при sgne i = –1 главный момент сил инерции sgn Ti = 1, и наоборот, при sgne i = 1 sgn Ti = –1.
Следовательно, второй задачей силового исследования механизма является определение реакций в кинематических парах.
В рычажных механизмах имеются только низшие кинематические пары. Силы взаимодействия звеньев, образующих такую пару, представляют собой равнодействующую элементарных сил, распределенных по поверхности соприкосновения звеньев (см. рис. 3.12, б, г).
В поступательной паре сила R 30, приложенная к некоторому звену 3 со стороны некоторого звена 0, направлена по нормали n – n (см. рис. 3.12, б); модуль этой силы неизвестен.
В некоторых случаях при силовом расчете расстояние X может быть больше длины звена l 0(см. рис. 3.12, в). Это будет свидетельствовать о том, что к звену 5 приложена не одна, а две реакции – RD 50 и RE 50, направленные навстречу друг другу и имеющие неизвестные модули.
Во вращательной паре силы реакций R 12 и R 21 направлены нормально к цилиндрической поверхности соприкосновения звеньев. Векторы реакций проходят через центр шарнира – точки А (см. рис. 3.12, г) и О 1 (см. рис. 3.12, д). Модули этих сил неизвестны, неизвестен и угол β.
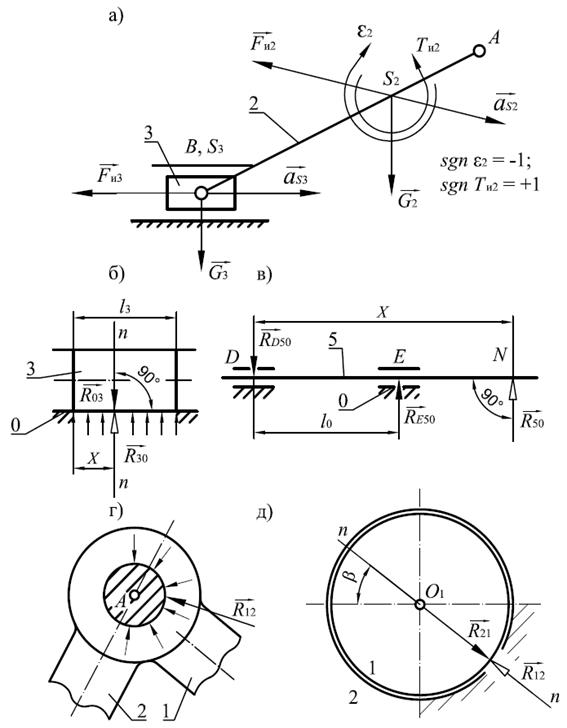
Рис. 3.12. Силы, действующие в механизмах и машинах: а – внешние силы (силы инерции, моменты сил инерции, силы тяжести звеньев); б, в – реакции в поступательной паре; г, д – реакции во вращательной паре
Определение реакций в кинематических парах относится к задачам кинетостатического расчета механизма. Кроме статически действующих сил, приложенных к звеньям механизма, учитываются также силы инерции.
При решении задач кинетостатики связанных систем применяется известный из теоретической механики принцип Даламбера совместно с принципом освобождаемости: не нарушая движения или покоя системы, можно отбрасывать отдельные связи и прикладывать к системе соответствующие этим связям реакции.
Применение вышеуказанных принципов приводит к уравнениям равновесия сил, приложенных к механизму. Условие статического равновесия звена заключается в том, что сумма сил, а также суммы всех моментов этих сил и пар сил, приложенных к звену, относительно произвольной точки плоскости одновременно равны нулю:
 (3.10)
(3.10)
По условию кинетостатической определимости кинематических цепей число неизвестных, определяемых из какой-либо системы уравнений, должно быть равно числу уравнений в системе. Поэтому сначала выясняется кинетостатическая определимость, а затем определяются реакции.
В общем случае каждая пара 5-го класса содержит два неизвестных: вращательная – величину и направление реакции, поступательная – величину и точку приложения реакции. Общее число неизвестных равно 2 р 5.
Для каждого звена (группы звеньев) можно составить три уравнения кинетостатики вида
3 m = 2 р 5,
где m – число подвижных звеньев; р 5 – число кинематических пар 5-го класса.
Этому условию отвечают структурные группы Ассура с одной степенью подвижности. Следовательно, решение задачи заключается в рассмотрении равновесия каждой структурной группы, начиная с последней. Методика определения реакций зависит от вида структурной группы.
Пример 6. Рассмотриммеханизм, на звенья которого действуют силы, как показано на рис. 3.13.
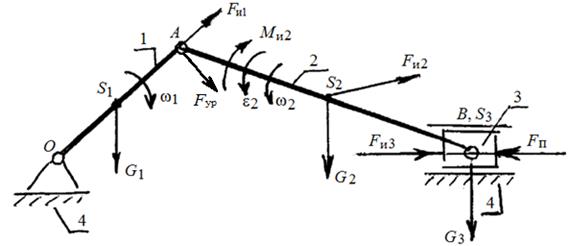
Рис. 3.13. Схема силового нагружения кривошипно-ползунного механизма: G 1– G 3 – силы тяжести звеньев 1–3; F ур – уравновешивающая сила; Fп – внешняя сила; F и1– F и3 – силы инерции звеньев 1–3; М и2 – момент сил инерции звена 2; S 1– S 3– центры масс звеньев 1–3; ɷ1, ɷ2 – угловые скорости звеньев 1 и 2; ε2 – угловое ускорение звена 2
Решение. Разделим данный механизм на группы Ассура и рассмотрим его, начиная с последней группы. Групп всего две: первая образуется звеньями 4–1, вторая – звеньями 2–3 (рис. 3.14).
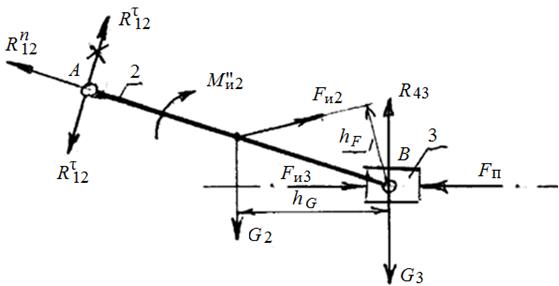
Рис. 3.14. План структурной группы 2–3 с приложенными силами: G 2, G 3 – силы тяжести звеньев 2, 3; F п – внешняя сила; F и2, F и3 – силы инерции звеньев 2, 3; Мʹʹ и2 – момент силы инерции звена 2;  – реакции в шарнире А; R 43 – реакция в ползуне
– реакции в шарнире А; R 43 – реакция в ползуне
Отделенные звенья заменяются для равновесия системы следующими реакциями: в точке A – реакциями  и
и  , действующими от звена 1 на звено 2, в ползуне 3 – реакцией R 43, действующей от неподвижной стойки 4 на звено 3.
, действующими от звена 1 на звено 2, в ползуне 3 – реакцией R 43, действующей от неподвижной стойки 4 на звено 3.
Беря сумму моментов сил (Н) относительно точки В, найдем величину реакции  (предварительно сделаем приведение момента сил инерции к масштабу чертежа µ l):
(предварительно сделаем приведение момента сил инерции к масштабу чертежа µ l):
где  – приведенный момент силы инерции звена 2, Н·мм; lAB – длина звена AB; hF – плечо силы инерции F и2 звена 2; h G – плечо силы тяжести G 2 звена 2.
– приведенный момент силы инерции звена 2, Н·мм; lAB – длина звена AB; hF – плечо силы инерции F и2 звена 2; h G – плечо силы тяжести G 2 звена 2.
Из уравнения видно, что  получится со знаком «минус». Предварительно направление реакции
получится со знаком «минус». Предварительно направление реакции  было принято произвольно, но теперь оно уточнено, поэтому необходимо изменить его на расчетной схеме.
было принято произвольно, но теперь оно уточнено, поэтому необходимо изменить его на расчетной схеме.
Из условия равновесия составим векторное уравнение для построения плана сил, показанных на рис. 3.14:

Из известных сил необходимо выбрать максимальную и, задаваясь ее графической величиной, определить вычислительный масштаб плана сил (Н/мм) для рассматриваемой группы:

где F п – действительная величина силы;  – графическая ее величина.
– графическая ее величина.
Имея вычислительный масштаб, можно определить величину векторов остальных известных сил. Например, графическая величина вектора силы тяжести, мм:

Примечание: если вектор получился весьма малой величины, то им можно пренебречь.
Порядок построения плана сил: из произвольно выбранной точки необходимо последовательно, согласно векторному уравнению, построить векторы сил, проводя их параллельно силам, показанным на звеньях группы. Величины векторов сил пока неизвестны, но известны их линии действия, пересечение которых на плане и определит величину сил, Н:
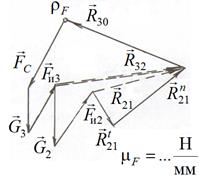
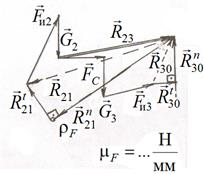
План сил для структурной группы 2–3 согласно расстановке сил, приложенных к звеньям на рис. 3.14, представлен на рис. 3.15.
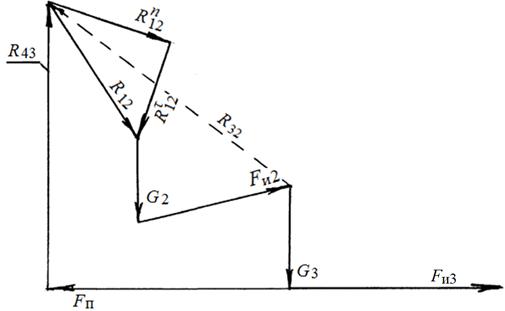
Рис. 3.15. План сил структурной группы 2–3 согласно расстановке сил, показанной на рис. 3.14
Рассмотрим первую группу Ассура 1–4, изображенную на рис. 3.16.
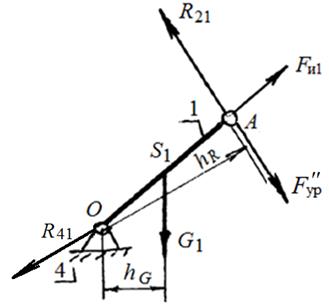
Рис. 3.16. План кривошипа с приложенными силами: G 1 – сила тяжести звена 1;  – уравновешивающая сила; F и1 – сила инерции звена 1; R 21, R 41 – реакции в шарнирах А и О (на рисунке не R 12, а R 21)
– уравновешивающая сила; F и1 – сила инерции звена 1; R 21, R 41 – реакции в шарнирах А и О (на рисунке не R 12, а R 21)
Векторное уравнение будет иметь следующий вид:
где F ʹ ур – уравновешивающая сила, определенная с помощью рычага Н. Е. Жуковского;  – уравновешивающая сила, определенная с помощью кинетостатического метода исследования механизма.
– уравновешивающая сила, определенная с помощью кинетостатического метода исследования механизма.
План сил для структурной группы 1–4 согласно расстановке сил, приложенных к кривошипу на рис. 3.16, представлен на рис. 3.17.
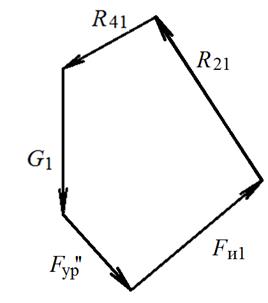
Рис. 3.17. План сил кривошипа
Примеры составления уравнений кинетостатики и построения планов сил групп Ассура даны в табл. 3.1.
Таблица 3.1
Уравнения кинетостатики и планы сил групп Ассура
| Схемы силового нагружения
| Уравнения кинетостатики
| Результаты
| Планы сил
|

| 1. Для звена 2:
 2. Для группы звеньев 2-3 2. Для группы звеньев 2-3
 3. Для звена 3:
3. Для звена 3:

|



| 
|

| 1. Для звена 2:  2. Для звена 2:
2. Для звена 2:
 2. Для звена 3:
2. Для звена 3:
 3. Для группы звеньев 2-3:
3. Для группы звеньев 2-3:

|



| 
|
Зная реакции в кинематических парах, можно определить мощность, затрачиваемую на преодоление трения.
1. Мощность на трение во вращательной паре, Вт:
P тр(вкп) = Ri × f × ri × ωотн, (3.11)
где Ri – реакция в кинематической паре, Н; f – коэффициент силы трения; ɷотн – относительная угловая скорость звеньев, 1/с; ri – радиус шарнира, м:
ri = 1/2000 · Ri 1/2. (3.12)
Величина относительной угловой скорости звеньев определяется согласно рис. 3.18.
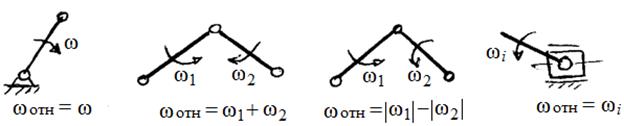
Рис. 3.18. Величина относительной угловой скорости звеньев ωотн: ω – угловая скорость кривошипа; ω1, ω2 – угловые скорости звеньев 1 и 2; ω i – угловая скорость i -го звена
2. Мощность на трение в поступательной паре, Вт:
P тр(пкп) = Ri · f · Vi. (3.13)
3. Суммарная мощность, затрачиваемая на трение, Вт:
P трS = S P тр(вкп) + P тр(пкп). (3.14)
Мгновенная мощность двигателя, Вт:
P дв(мгм) = P + P трS, P = (F пр · lOA · w1)/h. (3.15)
Для определения средней мощности двигателя необходимо рассмотреть механизм в положениях за один оборот пальца кривошипа.






