Кинематика механизмов – это раздел теории машин и механизмов, изучающий движение звеньев механизмов без рассмотрения вызывающих его причин и факторов.
Курсовая работа предусматривает проведение кинематического анализа механизма графоаналитическим методом. Вычисление кинематических параметров основано на геометрических построениях, с некоторым приближением заменяющих аналогичные аналитические и численные операции. Погрешность графических методов обычно не превышает 10 %, что вполне допустимо для решения многих прикладных инженерных задач кинематического анализа механизмов. Кинематический анализ механизмов выполняется по их кинематическим схемам.
Кинематическая схема механизма – это такая его структурная схема, где указаны размеры звеньев, необходимые для кинематического анализа. Эти размеры, называемые постоянными параметрами кинематической схемы механизма, могут быть линейными или угловыми. Число постоянных параметров механизма является рациональным (минимально требуемым) в том случае, когда все они взаимно независимы.
Рассматриваемые задачи кинематического анализа плоских рычажных механизмов II класса по Ассуру – Артоболевскому (I класса – по Г. Г. Баранову) можно решать графическим и графоаналитическим методами.
Последовательность решения частных задач кинематического анализа:
1) определить не менее шести положений звеньев механизма за один кинематический цикл и построить траектории движения всех характерных точек звеньев механизма за тот же цикл (эта частная задача решается путем построения плана положений механизма с использованием графического метода засечек);
2) определить линейные скорости всех характерных точек звеньев механизма и угловые скорости его звеньев для ряда фиксированных положений за один кинематический цикл (эта задача решается графоаналитическим (векторным) методом планов скоростей);
3) определить линейные ускорения всех характерных точек механизма и угловые ускорения его звеньев (эта задача решается графоаналитическим (векторным) методом планов ускорений).
План механизма – это изображение его кинематической схемы в некотором выбранном масштабе для определенного положения начального звена или начальной кинематической пары.
При изображении планов рычажных механизмов рекомендуется использовать единый линейный масштабный коэффициент μ l (м/мм) – отношение истинного линейного размера любого звена механизма (в метрах) к длине отрезка (в миллиметрах), изображающего это звено на схеме.
Таким образом:
μ l = L / l, (2.5)
где L – истинный линейный размер звена, м; l – длина изображающего его отрезка, мм.
Все длины отрезков l (мм), изображающих звенья механизма на чертеже, можно рассчитать по формуле
 (2.6)
(2.6)
Для получения наглядной картины изменения положения звеньев механизма и характера движения любой их точки в течение некоторого периода работы механизма обычно используется план положений механизма.
План положений механизма – это совместное изображение нескольких планов механизма, построенных в одном масштабе для соответствующего количества положений начального звена (как правило, шести или двенадцати) и отображающих изменение положений всех звеньев механизма и любых их точек за один кинематический цикл.
Кинематический цикл механизма – это период времени, по прошествии которого положения, величины и направления скоростей точек всех звеньев повторяются. В предлагаемых здесь заданиях кинематический цикл механизма соответствует периоду полного оборота его начального звена.
Чтобы определить линейные скорости всех характерных точек звеньев механизма для ряда фиксированных положений в течение одного кинематического цикла, необходимо построить план скоростей.
План скоростей – это чертеж, на котором в выбранном масштабе в виде отрезков изображены векторы, по модулю и направлению соответствующие скоростям характерных точек звеньев механизма в конкретный момент его движения (при некотором фиксированном положении звеньев на соответствующем плане механизма).
План скоростей, построенный для некоторого положения всего механизма в целом, представляет собой плоский пучок лучей (векторов), исходящих из одной общей точки – полюса p υ плана скоростей. Векторы, представляющие собой абсолютные скорости точек звеньев механизма, связанных с неподвижным звеном (стойкой), исходят из полюса плана. Скорости точек звеньев, связанных с другими подвижными звеньями, изображаются в виде прямых, соединяющих концы векторов абсолютных скоростей этих звеньев (т. е. в виде их векторной суммы). Скорость неподвижного звена, равная нулю, вырождается в точку и сосредоточена в полюсе плана скоростей.
Планы скоростей изображаются в масштабе с масштабным коэффициентом скоростей μυ, (м·с–1)/мм:
μυ = V / l υ, (2.7)
где V – истинная величина скорости, м/с; l υ – длина отрезка на плане, изображающего эту скорость, мм.
Имея построенный план скоростей, всегда можно легко определить любую скорость V (м/с) любой точки звена механизма:
V = μυ · l υ. (2.8)
План ускорений – это чертеж, на котором в выбранном масштабе в виде отрезков изображены векторы, по модулю и направлению соответствующие ускорениям характерных точек звеньев механизма в конкретный момент его движения (при некотором фиксированном положении звеньев на соответствующем плане механизма).
Планы ускорений изображаются в масштабе с масштабным коэффициентом ускорений μ а, (м·с–2)/мм:
μ а = а / lа, (2.9)
где а – истинная величина ускорения, м/с2; lа – длина отрезка на плане, изображающего это ускорение, мм.
Имея построенный план ускорений, всегда можно легко определить любое ускорение a (м/с2) любой точки звена механизма:
а = μ а · lа. (2.10)
Основной задачей при построении планов скоростей и ускорений является определение скоростей и ускорений характерных точек. Для этого необходимо составить векторные уравнения, связывающие неизвестные по модулю и направлению скорости и ускорения с уже известными скоростями и ускорениями в зависимости от характера движения звеньев и в соответствии с правилами и законами теоретической механики.
Векторные уравнения решаются графически: путем соответствующих построений непосредственно на плане скоростей и ускорений по правилам векторной алгебры.
При известных скоростях и ускорениях как минимум двух несовпадающих точек одного звена векторы скорости и ускорения любой третьей точки можно определить, используя теорему подобия для скоростей и ускорений: прямые линии, соединяющие точки одного звена на плане механизма, и прямые линии, соединяющие концы векторов абсолютных скоростей и ускорений этих же точек на плане скоростей и ускорений, образуют подобные фигуры и пропорциональные отрезки.
При использовании данной теоремы необходимо учитывать правило обхода контуров: направление обхода (чтения) фигуры или отрезка на плане скоростей и ускорений должно соответствовать направлению обхода точек того же звена на плане механизма.
Свойства планов скоростей и ускорений, которые необходимо учитыватьпри их построении и использовании:
1) векторы, выходящие из полюса p υ или pа и обозначенные по концам а, b, с..., представляют собой в масштабе абсолютные скорости и ускорения точек А, В, С...;
2) векторы ab, cb... изображают относительные скорости и ускорения соответствующих точек;
3) скорости и ускорения точек А, В, С звена АВ, лежащих на одной прямой, изображают также на одной прямой с соблюдением соотношения АВ / АС = аb / ас;
4) если точки А, В, С звена образуют треугольник АВС, то их изображения а, b, с на плане скоростей и ускорений образуют подобный треугольник, расположенный так же, как треугольник АВС.
2.2.1. Пример определения траекторий движения точек механизма
Пример 2. Построить траектории движения заданных точек исполнительного рычажного механизма качающегося инерционного конвейера (см. рис. 2.2) по следующим исходным данным: частота вращения кривошипа n 1 = 75 об/мин; размеры, м: l O 1 A = 0,2, lАВ = 0,6, l O 2 B = 0,5, lВC = 1,3, X 0 = 0,45, Y 0 = 0,1; центры масс звеньев 2–4 размещены посредине их длин, звена 1 – на оси кривошипа; положение звеньев для силового расчета механизма при φ1 = 150°.
Решение. Графическое построение траекторий движения точек звеньев осуществляется методом засечек. Рассмотрим суть этого метода на примере механизма, показанного на рис. 2.2. Здесь ведущее звено – кривошип ОА; угловая скорость постоянная.
Построение траекторий движения заданных точек начинается с вычерчивания в выбранном масштабе схемы механизма для заданного положения. Пример построения траекторий представлен на рис. 2.6.
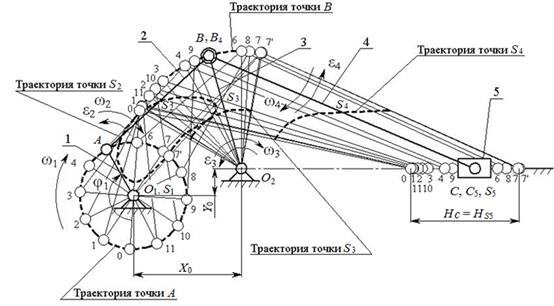
Рис. 2.6. План положений механизма, μ l = 0,01 м/мм
Методика построения планов механизма (см. рис. 2.6):
1) в выбранном масштабе радиусом, равным величине кривошипа О 1 А, из точки О 1 начертить окружность – получим траекторию пальца кривошипа с точкой А;
2) методом засечек эту окружность разделить на 12 (6) равных частей и произвести предварительную нумерацию точек деления в направлении вращения кривошипа;
3) найти координаты точки О 2 и положения линии действия точки С ползуна;
4) звено О 2 В совершает вращательное движение, поэтому его точки будут двигаться по дуге; растворами циркуля О 2 В провести эту дугу;
5) раствором циркуля размером звена АВ в масштабе из точки А 0 на дуге траектории точки В сделать засечку – получим точку В 0;
6) соединить точки А 0 и В 0 прямой линией – это положение звена АВ;
7) раствором циркуля размером звена ВС в масштабе из точки В 0 сделать засечку на пересечении с линией действия точки С ползуна – получим точку С 0;
8) из точки В 0 провести прямую до пересечения с точкой С 0 – это положение звена ВС.
Отсчет номеров положения точки А ведется по возрастающей по направлению вращения кривошипа. Начало отсчета (точка А 0) должно соответствовать положению механизма, при котором выходное звено С начинает движение рабочего хода, находясь в крайнем ближнем положении (т. е. в таком, из которого оно может двигаться только в одном направлении).
Далее методом засечек аналогично получают точки В 1, В 2, В 3... и С 1, С 2, С 3..., а затем соединяют между собой точки А и О 1, А и В, В и О 2, В и С в соответствии с номером положения.
Для определения траекторий движения центров масс звеньев АВ, ВО 2 и ВС необходимо указать их на соответствующем звене в каждом положении механизма, а затем соединить точки последовательно – получатся плавные кривые траекторий движения центров масс звеньев. Траектории показывают, что звенья АВ и ВС совершают плоскопараллельное движение, состоящее из поступательного движения и вращательного движения вокруг некоторого полюса, а звенья АО 1 и ВО 2 совершают вращательное движение вокруг неподвижной оси.
При графическом изображении рассмотренных построений рекомендуется схему механизма для заданного положения и траектории движения наносить жирными линиями, а промежуточные положения – тонкими (можно использовать линии разных цветов).
2.2.2. Пример построения плана скоростей механизма
Пример 3. Построить план скоростей исполнительного рычажного механизма качающегося инерционного конвейера (см. рис. 2.2) по следующим исходным данным: частота вращения кривошипа n 1 = 75 об/мин; размеры, м: l O 1 A = 0,2, lАВ = 0,6, l O 2 B = 0,5, lВC = 1,3, X 0 = 0,45, Y 0 = 0,1; центры масс звеньев 2–4 размещены посредине их длин, звена 1 – на оси кривошипа; положение звеньев для силового расчета механизма при φ1 = 150°.
Решение (рис. 2.7). Укажем на некоторые особенности решения рассматриваемой задачи, которые могут вызвать затруднения при ее разборе.
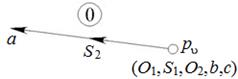


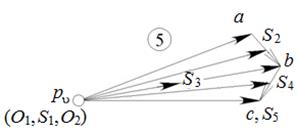

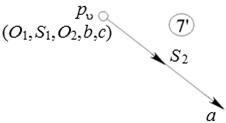

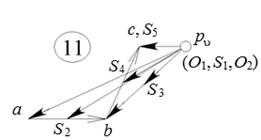
Рис. 2.7. Планы скоростей механизма для положений 0, 1, 3, 5, 7, 7ʹ, 9, 11; μυ = 0,035 (м·с–1)/мм
Крайние положения 0 и 7ʹ звеньев механизма определяются по результатам построения траекторий точек механизма (см. рис. 2.2). При составлении и использовании векторных уравнений для построения планов скоростей необходимо учесть, что ползун 5 совершает поступательное прямолинейное движение; кривошип 1 и коромысло 3 – вращательное движение вокруг неподвижных осей О 1 и О 2 соответственно; шатуны 2 и 4 – плоскопараллельное движение (см. пример 1).
Построение следует начинать с ведущего звена АО 1, в котором точка О 1 является неподвижной.
1. Абсолютная скорость точки А – это скорость вращения вокруг точки О 1:
 (2.11)
(2.11)
2. Угловая скорость кривошипа (рад/с) при частоте его вращения n 1 = 75 об/мин:

3. Модуль скорости точки А, м/с:

Скорость точки О 1: VО 1 = 0.
4. Масштабный коэффициент (м·с–1/мм) для планов скоростей находим по формуле (2.7):
Направление скорости кривошипа АО 1 определяется по направлению угловой скорости ω1 и строится перпендикулярно звену АО 1.
Затем выбираем полюс плана скоростей p υ (см. рис. 2.7) и в выбранном масштабе откладываем отрезок p υ а.
5. Для определения абсолютной скорости точки В (см. рис. 2.7) рассмотрим движение звена АВ вместе с точкой А, взятой за полюс, как поступательное (переносное), а движение звена вокруг точки А – как вращательное (относительное).
Абсолютная скорость  равна геометрической сумме переносной и относительной скоростей:
равна геометрической сумме переносной и относительной скоростей:
 (2.12)
(2.12)
где  – абсолютная скорость точки А;
– абсолютная скорость точки А;  – скорость вращения точки В относительно А.
– скорость вращения точки В относительно А.
В векторном уравнении (2.12) известны вектор скорости  и линии действия векторов
и линии действия векторов  и . Для графического решения этого уравнения из точки А плана скоростей проведем линию действия вектора
и . Для графического решения этого уравнения из точки А плана скоростей проведем линию действия вектора  перпендикулярно звену АВ, а из полюса p υ – линию действия
перпендикулярно звену АВ, а из полюса p υ – линию действия  перпендикулярно звену О 2 В. На пересечении этих линий получим точку b. Вектор
перпендикулярно звену О 2 В. На пересечении этих линий получим точку b. Вектор  = представляет собой в масштабе μυ абсолютную скорость точки В.
= представляет собой в масштабе μυ абсолютную скорость точки В.
Построим план скоростей механизма для положения 5 (φ = 150°). В этом положении модуль скорости (м/с) точки В можно вычислить по формуле (2.8) с учетом, что = 60 мм (см. рис. 2.7):

Абсолютную скорость  (м/с) также можно вычислить по (2.8) с учетом, что
(м/с) также можно вычислить по (2.8) с учетом, что  мм (см. рис. 2.7):
мм (см. рис. 2.7):

6. Положения точек центров масс S 2– S 4 на плане скоростей строятся на основе соотношений теоремы подобия для скоростей:



7. Для определения абсолютной скорости точки С составим векторное уравнение в виде геометрической суммы переносной и относительной  скоростей:
скоростей:
 (2.13)
(2.13)
В уравнении (2.13) известны линии действия вектора скорости  (параллельна оси х – х) и вектора скорости
(параллельна оси х – х) и вектора скорости  (перпендикулярна звену ВС). Для графического решения этого уравнения из точки b плана скоростей проведем линию действия вектора перпендикулярно звену АВ, а из полюса p υ – линию действия
(перпендикулярна звену ВС). Для графического решения этого уравнения из точки b плана скоростей проведем линию действия вектора перпендикулярно звену АВ, а из полюса p υ – линию действия  параллельно оси х – х. На пересечении этих линий получим точку С. Вектор
параллельно оси х – х. На пересечении этих линий получим точку С. Вектор  представляет собой в масштабе μυ абсолютную скорость точки С.
представляет собой в масштабе μυ абсолютную скорость точки С.
В положении 5 абсолютную скорость (м/с) точки С можно вычислить по формуле (2.8), учитывая, что  = 50 мм (см. рис. 2.7):
= 50 мм (см. рис. 2.7):

Абсолютную скорость (м/с) также можно вычислить по (2.8) с учетом, что  мм (см. рис. 2.7):
мм (см. рис. 2.7):

2.2.3. Пример построения плана ускорений механизма
Пример 4. Построить план ускорений исполнительного рычажного механизма качающегося инерционного конвейера (см. рис. 2.2) по следующим исходным данным: частота вращения кривошипа n 1 = 75 об/мин; размеры, м: l O 1 A = 0,2, lАВ = 0,6, l O 2 B = 0,5, lВC = 1,3, X 0 = 0,45, Y 0 = 0,1; центры масс звеньев 2–4 размещены посредине их длин, звена 1 – на оси кривошипа; положение звеньев механизма при угле поворота кривошипа φ1 = 150°.
Решение (рис. 2.8). При построении плана ускорений необходимо составить векторные уравнения для абсолютных ускорений характерных точек механизма, а затем решить их графическим способом (см. рис. 2.7, положение механизма 5).

Рис. 2.8. План ускорений механизма для положения 5 (φ1 = 150°; μ а = 0,24 (м·с–2)/мм)
Построение следует начинать с ведущего звена АО 1, в котором точка О 1 является неподвижной.
1. Абсолютное ускорение точки А – это ускорение вращения относительно точки О 1:
 (2.14)
(2.14)
где  – ускорение точки О 1, принятой за полюс, = 0;
– ускорение точки О 1, принятой за полюс, = 0;  – касательное ускорение точки А при ее вращении относительно О 1;
– касательное ускорение точки А при ее вращении относительно О 1;  – нормальное ускорение точки А ее при вращении относительно О 1.
– нормальное ускорение точки А ее при вращении относительно О 1.
Величина нормального ускорения точки А, м/с2:
Величина касательного ускорения точки А:

2. Масштабный коэффициент (м·с–2/мм) для планов ускорений находим по формуле (2.9):
Затем выбираем полюс плана ускорения pа (см. рис. 2.8) и в выбранном масштабе откладываем отрезок pаа.
3. Для определения абсолютного ускорения точки В рассмотрим движение звена АВ.
Абсолютное ускорение  представляет собой, с одной стороны, геометрическую сумму переносного ускорения, равного ускорению полюса А, и ускорения точки В при вращении относительно полюса А, а с другой стороны – геометрическую сумму переносного ускорения, равного ускорению полюса О 2, и ускорения точки В при вращении относительно полюса О 2.
представляет собой, с одной стороны, геометрическую сумму переносного ускорения, равного ускорению полюса А, и ускорения точки В при вращении относительно полюса А, а с другой стороны – геометрическую сумму переносного ускорения, равного ускорению полюса О 2, и ускорения точки В при вращении относительно полюса О 2.
Следовательно, необходимо решить систему уравнений:




 (2.15)
(2.15)
где  – переносное ускорение точки А;
– переносное ускорение точки А;  – ускорение точки О 2, принятой за полюс,
– ускорение точки О 2, принятой за полюс, 
 – касательное ускорение точки В при ее вращении относительно А;
– касательное ускорение точки В при ее вращении относительно А;  – нормальное ускорение точки В при ее вращении относительно А;
– нормальное ускорение точки В при ее вращении относительно А;  – касательное ускорение точки В при ее вращении относительно О 2;
– касательное ускорение точки В при ее вращении относительно О 2;  – нормальное ускорение точки В при ее вращении относительно О 2.
– нормальное ускорение точки В при ее вращении относительно О 2.
Модуль нормального ускорения (м/с2) точки В при ее вращении относительно А можно вычислить, используя результаты построения плана скоростей:

Модуль нормального ускорения (м/с2) точки В при ее вращении относительно О 2 также можно вычислить по построенному плану скоростей:

В векторном уравнении (2.15) известны линии действия векторов касательных ускорений  и
и  , но неизвестны их величины по модулю.
, но неизвестны их величины по модулю.
На плане ускорений вектор  изобразится отрезком
изобразится отрезком  , а вектор
, а вектор  – отрезком
– отрезком  Длины отрезков (мм) можно вычислить по формуле (2.10):
Длины отрезков (мм) можно вычислить по формуле (2.10):

Для графического решения этого векторного уравнения из точки a плана ускорений проведем отрезок по линии действия вектора  параллельно звену АВ, по модулю равный . Вектор ускорения мал по величине и на чертеже свелся в точку.
параллельно звену АВ, по модулю равный . Вектор ускорения мал по величине и на чертеже свелся в точку.
Теперь проведем линию, перпендикулярную линии действия вектора  . Из полюса pа проведем отрезок по линии действия вектора
. Из полюса pа проведем отрезок по линии действия вектора  параллельно звену ВО 2, по модулю равный
параллельно звену ВО 2, по модулю равный  а затем линию, перпендикулярную линии действия вектора
а затем линию, перпендикулярную линии действия вектора  На пересечении этих линий получим точку b. Вектор pаb = аВ представляет собой в масштабе μ а абсолютное ускорение точки В.
На пересечении этих линий получим точку b. Вектор pаb = аВ представляет собой в масштабе μ а абсолютное ускорение точки В.
4. Для определения абсолютного ускорения  точки С, совершающей поступательное движение параллельно оси х – х, необходимо составить векторное уравнение.
точки С, совершающей поступательное движение параллельно оси х – х, необходимо составить векторное уравнение.
Линия действия абсолютного ускорения представляет собой геометрическую сумму переносного ускорения, равного ускорению  полюса В, и ускорения
полюса В, и ускорения  точки С при вращении относительно полюса В:
точки С при вращении относительно полюса В:
 (2.16)
(2.16)
где  – переносное ускорение точки В;
– переносное ускорение точки В;  – касательное ускорение точки С при ее вращении относительно В;
– касательное ускорение точки С при ее вращении относительно В;  – нормальное ускорение точки С при ее вращении относительно В.
– нормальное ускорение точки С при ее вращении относительно В.
Модуль нормального ускорения (м/с2) точки С при ее вращении относительно В можно вычислить по результатам построения плана скоростей:

Модуль изобразится на плане ускорений отрезком  , который мал и на чертеже сводится в точку:
, который мал и на чертеже сводится в точку:
В векторном уравнении (2.16) известна линия действия вектора касательного ускорения  , но неизвестна его величина по модулю.
, но неизвестна его величина по модулю.
Для графического решения этого уравнения из точки b плана ускорений проведем линию действия вектора  перпендикулярно звену СВ. Затем из полюса pа проведем линию действия
перпендикулярно звену СВ. Затем из полюса pа проведем линию действия  параллельно х – х. На пересечении этих линий получим точку с. Вектор
параллельно х – х. На пересечении этих линий получим точку с. Вектор  представляет собой в масштабе μ а абсолютное ускорение точки В.
представляет собой в масштабе μ а абсолютное ускорение точки В.
Модуль ускорения (м/с2) можно вычислить по формуле (2.10) с учетом, что  :
:

Векторы ускорений точек S 2– S 4 находятся на плане ускорений аналогично скоростям этих точек (в соответствии с теоремой подобия для ускорений и правилом обхода контуров).
Результаты кинематического анализа необходимы для исследования рабочего процесса механизма и проектирования его узлов и деталей. Скорости и ускорения используются для расчета сил, мощностей, износостойкости и определения истинного движения машины.





