Силы и пары сил, приложенные к звеньям механизма, при исследовании движения целесообразно заменять одной силой, приложенной к выбранной точке какого-либо звена так, чтобы эта сила была эквивалентна всем другим силам. Такая сила называется приведенной F пр, а звено, к которому она приложена, – звеном приведения (рис. 3.1). Величина приведенной силы определяется из условия, что работа уравновешивающих сил на возможном перемещении точки приложения равна сумме элементарных работ приводимых сил.
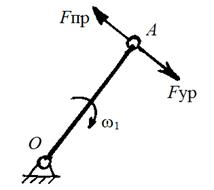
Рис. 3.1. Приведенная F пр и уравновешивающая F ур силы
Уравновешивающая сила F ур равна приведенной силе и противоположна ей по знаку:
F пр = – F ур. (3.1)
Приведенная сила определяется из условия, что ее мгновенная мощность равна сумме мгновенных мощностей всех сил, действующих на звенья:
 (3.2)
(3.2)
где Fj – все силы, действующие на звенья механизма, Н; Мj – все приводимые моменты сил, Нм; V – скорость точки звена приведения, м/с; Vj – скорость точки центра тяжести звена, м/с; ω j – угловая скорость звена, 1/с; α j – угол между соответствующей силой и скоростью.
Для упрощенного расчета приведенной силы в данной курсовой работе можно использовать формулу (3.2), где учтено только действие внешних сил сопротивления. В качестве звена приведения используем кривошип. Таким образом, если линия действия внешних сил сопротивления совпадает с направлением движения выходного звена, формула (3.2) принимает следующий вид:
 (3.3)
(3.3)
где V 1 – скорость точки звена приведения, м/с; F с – внешняя сила сопротивления (указана в задании), Н; Vро – скорость выходного звена, м/с.
Приведенный момент сил М пр определяется из условия, что его мгновенная мощность равна сумме мгновенных мощностей всех приводимых моментов сил, действующих на звенья:
 (3.4)
(3.4)
где ω j – угловая скорость звена, 1/с; ω1 – угловая скорость кривошипа, 1/с; Fj – все силы, действующие на звенья механизма, Н; Vj – скорость точки центра тяжести звена, м/с; Мj – все приводимые моменты сил, Нм; α j – угол между соответствующей силой и скоростью.
Если линия действия внешних сил сопротивления совпадает с направлением движения выходного звена, то для упрощенного расчета приведенного момента сил в данной курсовой работе можно использовать формулу (3.3), где учтено только действие внешних сил сопротивления, а момент сил вредного сопротивления М вс составляет 10 % от момента полезных сил сопротивления (М пс = F с V ро/ω1). В качестве звена приведения используем кривошип. Таким образом, формула (3.3) будет выглядеть так:
 (3.5)
(3.5)
где ω1 – угловая скорость кривошипа, 1/с; F с – внешняя сила сопротивления (указана в задании), Н; V ро – скорость выходного звена (по заданию это скорость ползуна), м/с; М вс – момент вредных сил сопротивления, Н·м.
Для более точного расчета приведенной силы и приведенного момента сил применяют графоаналитический метод рычага Н. Е. Жуковского [1].





