Силовой расчет плоского рычажного механизма в курсовой работе предлагается выполнять методом кинетостатики с использованием графоаналитического способа построения планов сил.
Кинетостатика – это раздел механики, изучающий движение посредством уравнений, записанных в форме уравнений статики с использованием принципа Даламбера.
Механизм работает под воздействием различных сил: движущих сил, сил сопротивления, тяжести, инерции. Активные силы, реакции связей и силы инерции в любой момент движения образуют равновесную систему сил.
Силы, действующие на механизм:
1) движущие силы  и моменты движущих сил
и моменты движущих сил 
2) силы сопротивления и моменты сил сопротивления: полезного (технологического) –  и вредного –
и вредного – 
3) силы тяжести подвижных звеньев 
4) силы реакций связей в кинематических парах 
5) силы инерции и моменты инерции:
- сила инерции при поступательном движении (рис. 3.2):
F и i = – m i × a Si, (3.6)
где m i – масса i -го звена, кг; a Si – значение модуля ускорения точки Si, м/с2; знак «минус» означает, что вектор силы инерции направлен в противоположную вектору ускорения центра тяжести звена сторону;
- момент сил инерции при вращательном движении (рис. 3.3):
M и i = – JSi × e i × sgne i, (3.7)
где JSi – заданный момент инерции i -го звена, кг×м2; e i – угловое ускорение звена, 1/с2.
Направление углового ускорения (sgne i = ±1) определяется тем направлением, куда вектор касательного ускорения  стремится «повернуть» звено вокруг центра его вращения: sgne i = 1 – при вращении против часовой стрелки; sgne i = –1 – при вращении по часовой стрелке.
стремится «повернуть» звено вокруг центра его вращения: sgne i = 1 – при вращении против часовой стрелки; sgne i = –1 – при вращении по часовой стрелке.

Рис. 3.2. Сила инерции при поступательном движении: S – центр тяжести звена; F и – сила инерции
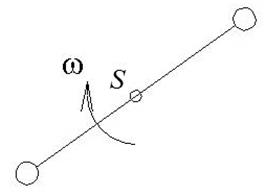
Рис. 3.3. Момент сил инерции при вращательном движении: ω – угловая скорость звена; S – центр масс звена
Для примера рассмотрим механизм, на который действуют силы, как показано на рис. 3.4.
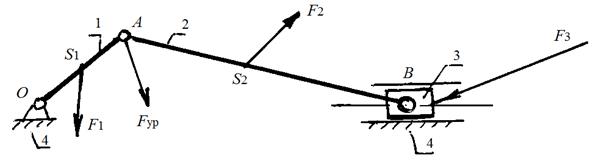
Рис. 3.4. Схема силового нагружения механизма: F 1– F 3 – силы, действующие на звенья; F ур – уравновешивающая сила; S 1, S 2 – центры масс звеньев
Определение уравновешивающей силы аналитическим методом выполняется следующим образом:
1) составим уравнение суммы элементарных работ всех сил:

2) разделим составляющие на dt:

3) так как  – скорость точки Si, то:
– скорость точки Si, то:

Таким образом, получаем для уравновешивающей силы:
 (3.8)
(3.8)
Так называемый рычаг Н. Е. Жуковского представляет собой графическую интерпретацию известного принципа Даламбера – Лагранжа об элементарной работе приложенных к механической системе сил: рычаг Н. Е. Жуковского для механизма с одной степенью свободы всегда находится в равновесии.
Для построения и использования рычага Н. Е. Жуковского необходимо:
1) повернуть план скоростей механизма вокруг полюса  в любую сторону (например, в сторону вращения кривошипа) на 90°;
в любую сторону (например, в сторону вращения кривошипа) на 90°;
2) приложить в соответствующих динамической схеме механизма точках повернутого плана скоростей все активные силы, силы инерции и неизвестную уравновешивающую силу;
3) составить уравнение моментного равновесия полученной схемы относительно полюса  повернутого плана скоростей.
повернутого плана скоростей.
Направления векторов сил на рычаге должны строго соответствовать их направлениям на динамической схеме механизма. Плечи сил относительно полюса в миллиметрах снимаются непосредственно с чертежа рычага. Вектор  уравновешивающей силы прикладывается в точке а рычага перпендикулярно отрезку
уравновешивающей силы прикладывается в точке а рычага перпендикулярно отрезку  .
.
Этот метод дает возможность решать сложные задачи динамики с помощью уравнений равновесия статики.
Пример 5. Пусть на звенья механизма действуют силы, как указано на рис. 3.5.

Рис. 3.5. Схема силового нагружения кривошипно-ползунного механизма: F 1– F 3 – силы, действующие на звенья; F ур – уравновешивающая сила; S 1, S 2 – центры масс звеньев; VA – скорость точки А; VB – скорость точки B; VS 1, VS 2 – скорости точек центров масс
Решение. Принцип построения рычага Н. Е. Жуковского для кривошипно-ползунного механизма, изображенного на рис. 3.5, показан на рис. 3.6.

Рис. 3.6. Построение рычага Н. Е. Жуковского: h 1– h 3 – плечи сил F 1– F 3, приложенных к центрам масс звеньев S 1– S 3; h ур (вектор скорости точки A) – плечо уравновешивающей силы F ур
Из условия равновесия момент от уравновешивающей силы F ур относительно полюса  равен сумме моментов всех сил, приложенных к механизму относительно полюса :
равен сумме моментов всех сил, приложенных к механизму относительно полюса :
Таким образом, мы получили уравнение, аналогичное уравнению аналитического метода.
В курсовом проекте уравновешивающую силу F ур необходимо определить в два этапа:
1) для шести положений механизма – только от действия сил тяжести и внешней силы (рис. 3.7);
2) для положения механизма с F ур максимальной (с учетом сил инерции F и i и моментов инерции M и i ) (рис. 3.8).
Рис. 3.9 и 3.8 поменяны местами и номерами, чтобы ссылки шли по порядку
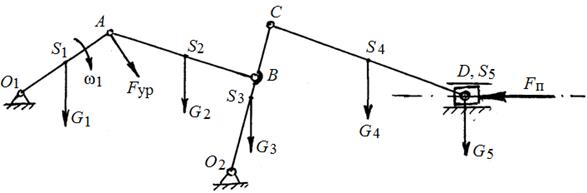
Рис. 3.7. Схема силового нагружения кривошипно-ползунного механизма: G 1– G 5 – силы тяжести звеньев; F ур – уравновешивающая сила; F п – внешняя сила полезного сопротивления; S 1– S 5 – центры масс звеньев

Рис. 3.8. Схема силового нагружения механизма: G 1– G 5 – силы тяжести звеньев; F ур – уравновешивающая сила; F п – внешняя сила; F и1– F и5 – силы инерции звеньев; М и2– М и4 – моменты инерции звеньев 2–4; S 1– S 5 – центры масс звеньев; ε2–ε4 – угловые ускорения звеньев

Рис. 3.9. Рычаг Н. Е. Жуковского: h 1– h 4 – плечи сил тяжести G 1– G 4,приложенных к центрам масс звеньев S 1– S 5; h ур – плечо уравновешивающей силы F ур; h 5 – плечо внешней силы F п
Этап 1. Определение уравновешивающей силы F ур от действия сил тяжести и внешней силы.
Условие равновесия для вычисления F ур можно записать следующим образом:

Примечания
1. Если F ур получится со знаком «минус», то нужно изменить направление на плане нагрузки.
2. F ур следует направлять:
- в машинах-орудиях – по ω1;
- в машинах-двигателях – против ω1.
3. Сила полезного сопротивления (внешняя сила) F п определяется по заданной диаграмме.
Пример построения рычага Н. Е. Жуковского для определения F ур для всего механизма только от действия сил тяжести и внешней силы показан на рис. 3.8.
Этап 2. Определение уравновешивающей силы F ур от действия сил тяжести и внешней силы с учетом сил инерции F и i и моментов сил инерции M и i .
Силы инерции F и i (Н) и моменты сил инерции M и i (Н·м) звеньев можно вычислить по формулам (3.6) и (3.7):
где  – касательное ускорение точки звена i, м/с2;
– касательное ускорение точки звена i, м/с2;  – ускорение точки центра тяжести звена i, м/с2; ε i – угловое ускорение звена i, 1/с2; pi – радиус инерции звена i, м, pi = 0,29 li; JSi – момент инерции звена i, кг·м2; li – длина звена i, м; mi – масса звена i, кг.
– ускорение точки центра тяжести звена i, м/с2; ε i – угловое ускорение звена i, 1/с2; pi – радиус инерции звена i, м, pi = 0,29 li; JSi – момент инерции звена i, кг·м2; li – длина звена i, м; mi – масса звена i, кг.
Пример построения рычага Н. Е. Жуковского для определения F ур для всего механизма от действия сил тяжести, внешней силы и с учетом сил инерции F и i и моментов инерции M и i представлен на рис. 3.10.
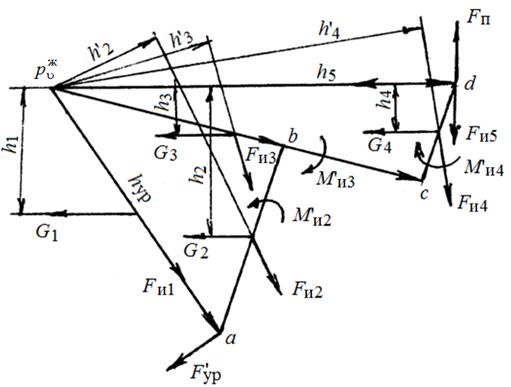
Рис. 3.10. Построение рычага Н. Е. Жуковского: h 1– h 4 – плечи сил тяжести G 1– G 4,приложенных к центру масс звеньев; h ур – плечо уравновешивающей силы Fʹ ур; h 5 – плечо внешней силы F п; h ʹ 2– h ʹ 4 – плечи сил инерции F и2– F и4; Мʹ и2– Мʹ и4 – моменты сил инерции звеньев 2–4
План ускорений, использовавшийся для определения сил инерции и моментов сил инерции при построении рычага Н. Е. Жуковского, показан на рис. 3.11.
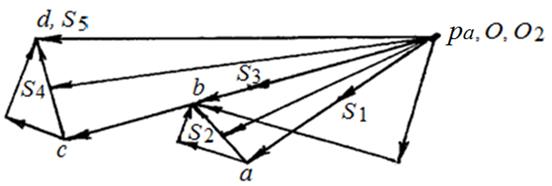
Рис. 3.11. План ускорений для механизма, изображенного на рис. 3.7: a – d – скорости точек A – D; S 1– S 5 – скорости центров тяжести звеньев
Уравновешивающая сила Fʹ ур для этапа 2, где учитываются все силы, действующие на механизм, может быть вычислена из условия, что момент от Fʹ ур относительно полюса  равен сумме моментов всех сил, приложенных к механизму относительно полюса
равен сумме моментов всех сил, приложенных к механизму относительно полюса  :
:
где h ур – плечо уравновешивающей силы; Ʃ M – сумма моментов всех сил, приложенных к механизму.
Предварительно сделаем приведение момента сил инерции к масштабу плана скоростей. Масштабный коэффициент плана скоростей μυ можно вычислить по формуле (2.7). Тогда приведенный момент силы инерции (Н·мм) каждого из звеньев рассчитывается по формуле
Решая уравнение равновесия, получим выражение для вычисления уравновешивающей силы:







