

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Ускорение. Нормальная и тангенциальная составляющие ускорения
Механическое движение по характеру подразделяется на поступательное, вращательное и колебательное; по виду траектории – прямолинейное и криволинейное. Также механическое движение можно подразделять по характеру изменения скорости.
Физическая величина, которая определяет быстроту изменения скорости, называется ускорением. Математически ускорение определяется отношением изменения скорости к промежутку времени, за которое оно произошло (производная от скорости по времени):  , где
, где  – ускорение;
– ускорение;  – изменение скорости;
– изменение скорости;  – промежуток времени, за которое произошло изменение скорости;
– промежуток времени, за которое произошло изменение скорости;  – производная скорости по времени.
– производная скорости по времени.
Так как скорость – величина векторная, то она может меняться по модулю и направлению, поэтому ускорение имеет две естественные составляющие: тангенциальную (параллельную вектору скорости) и нормальную (перпендикулярную вектору скорости).
 , где – полное ускорение;
, где – полное ускорение;  – тангенциальная составляющая ускорения;
– тангенциальная составляющая ускорения;  – нормальная составляющая ускорения (см. рис. 1).
– нормальная составляющая ускорения (см. рис. 1).

Рис. 1. Тангенциальная и нормальная составляющие полного ускорения
Тангенциальная составляющая ускорения характеризует быстроту изменения величины (модуля) скорости. Тангенциальное ускорение всегда коллинеарно скорости.
1) Если тангенциальная составляющая ускорения сонаправлена со скоростью, то движение будет ускоренное (см. рис. 2).


Рис. 2. Тангенциальная составляющая ускорения сонаправлена со скоростью
2) Если тангенциальная составляющая ускорения противонаправлена скорости, то движение будет замедленным (см. рис. 3).


Рис. 3. Тангенциальная составляющая ускорения противонаправлена скорости
Нормальная составляющая ускорения характеризует быстроту изменения скорости по направлению. Нормальное ускорение всегда перпендикулярно скорости и направлено к центру по радиусу траектории, по которой движется тело (см. рис. 4).


Рис. 4. Направление нормального ускорения
Величина нормального ускорения связана с радиусом траектории и со скоростью движения следующим соотношением: 
При прямолинейном движении тело имеет только тангенциальное ускорение. Нормальное ускорение отсутствует, так как скорость тела по направлению остаётся неизменной (см. рис. 5).

Рис. 5. Прямолинейное движение
При криволинейном движении, как правило, тело имеет тангенциальную и нормальную составляющую ускорения (см. рис. 6).

Рис. 6. Криволинейное движение
Пример нахождения тангенциальной и нормальной составляющей ускорения
Рассмотрим движение тела, брошенного под углом к горизонту (см. рис. 7). Найдём составляющие ускорения в тот момент, когда скорость тела направлена под углом  к горизонту.
к горизонту.

Рис. 7. Траектория движения тела
Касательная к траектории в точке A – это направление скорости  . Ускорение тела, брошенного под углом к горизонту, всегда равно ускорению свободного падения:
. Ускорение тела, брошенного под углом к горизонту, всегда равно ускорению свободного падения:  .
.
Спроецируем данное ускорение на две взаимно перпендикулярные оси, одна из которых перпендикулярна скорости, другая направлена вдоль скорости.

Рис. 8. Проекции ускорения
На рисунке видно, что тангенциальная составляющая ускорения направлена против скорости, то есть скорость тела в данный момент уменьшается (см. рис. 8). Нормальная составляющая ускорения направлена перпендикулярно скорости, следовательно, скорость в следующий момент наклонится в сторону .
Величины составляющих ускорения находим геометрически.

Рис. 9. Геометрическое определение величины составляющих ускорения
Угол A в треугольнике разложения на составляющие (треугольник выделен жёлтым на рисунке) имеет взаимно перпендикулярные стороны с углом  (см. рис. 9), поэтому
(см. рис. 9), поэтому  .
.
Следовательно, тангенциальная составляющая равна:  .
.
Нормальная составляющая ускорения равна:  .
.
Задача 1
Обод радиусом 1 метр катится по горизонтальной поверхности со скоростью 10 м/с. Найти радиус траектории точки поверхности обода при прохождении наивысшего положения.
Дано:  ;
;  .
.
Найти:  .
.
Решение

Рис. 10. Иллюстрация к задаче
На рисунке изображён обод, который катится по горизонтальной поверхности со скоростью  (см. рис. 10). Точка A – точка касания обода горизонтальной поверхности, точка B – наивысшая точка в начальный момент времени. Точка A будет перемещаться по траектории, которая обозначена жёлтым цветом, она называется циклоидой. Эта точка вновь коснётся поверхности, пройдя путь, равный длине траектории:
(см. рис. 10). Точка A – точка касания обода горизонтальной поверхности, точка B – наивысшая точка в начальный момент времени. Точка A будет перемещаться по траектории, которая обозначена жёлтым цветом, она называется циклоидой. Эта точка вновь коснётся поверхности, пройдя путь, равный длине траектории:  .
.
Скорость точки A относительно горизонтальной поверхности при движении обода без проскальзывания равна нулю. Это объясняется тем, что она движется вместе с ободом по горизонтали со скоростью и относительно центра обода совершает движение по окружности со скоростью  . В точке A эти скорости будут противонаправлены:
. В точке A эти скорости будут противонаправлены:  . Следовательно, скорость движения по окружности и скорость движения центра обода равны:
. Следовательно, скорость движения по окружности и скорость движения центра обода равны:  .
.
Скорости точек в верхней части обода равны:  . Эта скорость будет направлена по горизонтали в сторону движения обода.
. Эта скорость будет направлена по горизонтали в сторону движения обода.
С центром обода у всех точек, лежащих на её поверхности, связано нормальное ускорение, так как оно направлено перпендикулярно скорости движения точки по окружности в любой момент времени.
Ускорение остаётся неизменным для всех точек поверхности обода, так как при переходе к системе отсчёта, связанной с Землёй, центр обода движется равномерно:  .
.
Тогда для точки  получается следующее соотношение:
получается следующее соотношение:  , где r – искомый радиус.
, где r – искомый радиус.



В этой задаче заданное значение начальной скорости было лишним. Избыточные данные часто включают в задания ЕГЭ по физике.
Ответ:  .
.
Задача 2
После удара футбольный мяч за 2 с пролетел 40 м и упал на землю. Чему равен радиус траектории мяча в верхней точке траектории?
Дано:  ;
;  ;
;  .
.
Найти:  .
.
Решение

Рис. 11. Иллюстрация к задаче
На рисунке изображена траектория полёта мяча (см. рис. 11). Точка A – верхняя точка траектории, скорость мяча в которой  . Ускорение g в верхней точке направлено вниз. Очевидно, что это нормальная составляющая ускорения, так как она направлена перпендикулярно скорости:
. Ускорение g в верхней точке направлено вниз. Очевидно, что это нормальная составляющая ускорения, так как она направлена перпендикулярно скорости:  .
.
Скорость в точке A – это горизонтальная составляющая скорости, которая в процессе всего движения остаётся неизменной. Поэтому скорость в точке A равна отношению всего пути, пройденного по горизонтали, ко времени:  .
.
Следовательно, радиус траектории в верхней точке равен:  .
.
Ответ:  .
.
Современная формулировка
| Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению: F → 2 → 1 = − F → 1 → 2. {\displaystyle {\vec {F}}_{2\to 1}=-{\vec {F}}_{1\to 2}.} |
Закон утверждает, что силы возникают лишь попарно, причём любая сила, действующая на тело, имеет источник происхождения в виде другого тела. Иначе говоря, сила всегда есть результат взаимодействия тел. Существование сил, возникших самостоятельно, без взаимодействующих тел, невозможно[17].
Историческая формулировка
Ньютон дал следующую формулировку закона[1]:
| Действию всегда есть равное и противоположное противодействие, иначе — взаимодействия двух тел друг на друга между собою равны и направлены в противоположные стороны. |
Для силы Лоренца третий закон Ньютона не выполняется. Лишь переформулировав его как закон сохранения импульса в замкнутой системе из частиц и электромагнитного поля, можно восстановить его справедливость[18][19].
4 Центр масс механической системы

Центром масс механической системы называется такая геометрическая точка C, концентрируя в которой (мысленно) массу M всей механической системы, получим, что ее статический момент массы равен статическому моменту массы всей механической системы, т.е.
M × rc = ∑mj × rj (1.1)
Отсюда
Проецируя обе части равенства (1.2) на оси координат, получаем аналитические формулы для координат центра масс механической системы:
Выражению (1.2) можно придать и другой вид, если умножить числитель и знаменатель ее правой части на ускорение силы тяжести. В этом случае
где Pj = mj ∙ g (j = 1,2,3,…,n) – веса материальных точек, образующих механическую систему;
∑Pj = M ∙ g = G – вес всей механической системы.
Выражение (1.4) определяет радиус-вектор центра тяжести неизменяемой материальной системы в предположении, что она находится в поле силы тяжести.
Отсюда следует, что центр тяжести неизменяемой (жесткой) механической системы (в частности твердого тела) совпадает с центром масс.
Однако понятия о центре масс и центре тяжести механической системы не являются тождественными. Понятие о центре тяжести как о точке, через которую проходит линия действия равнодействующей сил тяжести, по существу имеет смысл только для твердого тела, находящегося в однородном поле тяжести.
Понятие же о центре масс как о характеристике распределения масс в механической системе является более широким, так как имеет смысл для любой механической системы независимо от того, находится ли данная система под действием каких-либо сил или нет. Поэтому понятие центра тяжести можно рассматривать как частный случай по отношению к понятию центра масс.
В общем случае следует говорить о центре масс материальной (механической) системы, а не о центре тяжести. При определении центра масс материальной системы можно пользоваться методами, установленными в статике для определения центра тяжести (метод симметрии, метод расчленения на простейшие элементы, метод отрицательных масс и т.д.).
Рис. 6
 . (1.1)
. (1.1)
Введем в рассмотрение радиус-вектор  , определяющий положение точки B – точки приложения силы
, определяющий положение точки B – точки приложения силы  (рис. 7).
(рис. 7).

Рис. 7
При рассмотрении векторного произведения векторов и , оказывается, что
а)  ;
;
б) 
 плоскости, в которой находятся
плоскости, в которой находятся  ;
;
в)  составляют правую тройку векторов, т. е. если смотреть с конца третьего вектора, поворот от первого ко второму вектору виден против хода часовой стрелки.
составляют правую тройку векторов, т. е. если смотреть с конца третьего вектора, поворот от первого ко второму вектору виден против хода часовой стрелки.
Таким образом, можно сделать следующий вывод:
 . (1.2)
. (1.2)
В случае плоской системы сил величину момента силы относительно точки, лежащей в плоскости действия сил, можно рассматривать как алгебраическую величину, равную взятому со знаком плюс или минус произведению модуля силы на плечо:
 .
.
При этом величина момента берется со знаком плюс, если сила стремится осуществить поворот тела относительно точки против хода часовой стрелки и со знаком минус в противоположном случае (рис. 8).

Рис. 8
1.3.2. Момент силы относительно оси
Определение: Моментом силы относительно оси называется взятая со знаком плюс или минус величина момента проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси и плоскости:
 . (1.3)
. (1.3)
Момент берется со знаком плюс, если, смотря с конца положительного направления оси, видно, что проекция силы стремится осуществить поворот тела относительно оси против хода часовой стрелки. В противном случае момент берется со знаком минус (рис. 9).

Рис. 9
Момент силы относительно оси не зависит от выбора плоскости, перпендикулярной оси.
Момент силы относительно оси равен нулю, если:
·  =0, т.е. сила параллельна оси,
=0, т.е. сила параллельна оси,
· h=0, т.е. линия действия силы пересекает ось.
Относительно точки и оси
Момент силы относительно оси равен проекции на эту ось момента силы относительно любой точки, лежащей на этой оси (рис. 10):
 . (1.4)
. (1.4)


Рис. 10
Возьмем вторую точку на оси О1 (рис. 11) и единичный орт  оси l, тогда
оси l, тогда

Здесь  .
.

Рис. 11
Зависимость между моментами силы относительно оси и точки иногда принимается в качестве определения момента силы относительно оси, которое эквивалентно определению, данному в пункте 1.3.2.
Примеры решения задач
Пример 2.1. Маховик массой m =5кг и радиусом r = 0,2 м вращается вокруг горизонтальной оси с частотой ν 0=720 мин-1 и при торможении останавливается за t =20 с. Найти тормозящий момент и число оборотов до остановки.
Решение
Для определения тормозящего момента применим основное уравнение динамики вращательного движения
IΔω = MΔt
где I=mr2– момент инерции диска; Δω =ω - ω0, причём ω =0 конечная угловая скорость, ω0=2πν0 - начальная. М –тормозящий момент сил, действующих на диск.
Зная все величины, можно определить тормозящий момент
-mr2 2πν0 = МΔt (1)
откуда
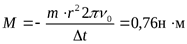 (2)
(2)
Из кинематики вращательного движения угол поворота за время вращения диска до остановки может быть определён по формуле
 (3)
(3)
где β–угловое ускорение.
По условию задачи: ω =ω0 – βΔt, так как ω=0, ω0 = βΔt
Тогда выражение (2) может быть записано в виде:
 Пример 2.2. Два маховика в виде дисков одинаковых радиусов и масс были раскручены до скорости вращения n= 480 об/мин и предоставили самим себе. Под действием сил трения валов о подшипники первый остановился через t =80 с, а второй сделал N= 240 оборотов до остановки. У какого и маховика момент сил трения валов о подшипники был больше и во сколько раз.
Пример 2.2. Два маховика в виде дисков одинаковых радиусов и масс были раскручены до скорости вращения n= 480 об/мин и предоставили самим себе. Под действием сил трения валов о подшипники первый остановился через t =80 с, а второй сделал N= 240 оборотов до остановки. У какого и маховика момент сил трения валов о подшипники был больше и во сколько раз.
Решение:
Момент сил терния М1 первого маховика найдём, воспользовавшись основным уравнением динамики вращательного движения
M1Δt = Iω2- Iω1
где Δt – время действия момента сил трения, I=mr2 - момент инерции маховика, ω1= 2πν и ω2= 0– начальная и конечная угловые скорости маховиков
Тогда 
Момент сил трения М2 второго маховика выразим через связь между работой А сил трения и изменением его кинетической энергии ΔEк:
 где Δφ = 2πN – угол поворота, N -число оборотов маховика.
где Δφ = 2πN – угол поворота, N -число оборотов маховика.

 Тогда, откуда
Тогда, откуда
О  тношение будет равно
тношение будет равно
 Момент сил трения второго маховика в 1.33 раза больше.
Момент сил трения второго маховика в 1.33 раза больше.
Пример 2.3. Масса однородного сплошного диска m, массы грузов m1 и m2 (рис.15). Скольжения и трения нити в оси цилиндра нет. Найти ускорение грузов и отношение натяжений нити  в процессе движения.
в процессе движения.
Решение
 Проскальзывания нити нет, поэтому, когда m1 и m2 будут совершать поступательное движение, цилиндр будет совершать вращение относительно оси, проходящей через точку О. Положим для определённости, что m2 > m1 .
Проскальзывания нити нет, поэтому, когда m1 и m2 будут совершать поступательное движение, цилиндр будет совершать вращение относительно оси, проходящей через точку О. Положим для определённости, что m2 > m1 .
Тогда груз m2 опускается и цилиндр вращается по часовой стрелке. Запишем уравнения движения тел, входящих в систему

Первые два уравнения записаны для тел с массами m1 и m2, совершающих поступательное движение, а третье уравнение – для вращающегося цилиндра. В третьем уравнении слева стоит суммарный момент сил, действующих на цилиндр (момент силы T1 взят со знаком минус, так как сила T1 стремится повернуть цилиндр против часовой стрелки). Справа I - момент инерции цилиндра относительно оси О, который равен

где R - радиус цилиндра; β - угловое ускорение цилиндра.
Так как проскальзывания нити нет, то  . С учётом выражений для I и β получим:
. С учётом выражений для I и β получим:

Складывая уравнения системы, приходим к уравнению

Отсюда находим ускорение a грузов

Далее легко найти T1 и T2 и их отношение

Из полученного уравнения видно, что натяжения нитей будут одинаковы, т.е.  =1, если масса цилиндра будет гораздо меньше массы грузов.
=1, если масса цилиндра будет гораздо меньше массы грузов.
Пример 2.4. Полый шар массой m = 0,5 кг имеет внешний радиус R = 0,08м и внутренний r = 0,06м. Шар вращается вокруг оси, проходящей через его центр. В определённый момент на шар начинает действовать сила, в результате чего угол поворота шара изменяется по закону  . Определить момент приложенной силы.
. Определить момент приложенной силы.
Решение
Решаем задачу, используя основное уравнение динамики вращательного движения  . Основная трудность – определить момент инерции полого шара, а угловое ускорение β находим как
. Основная трудность – определить момент инерции полого шара, а угловое ускорение β находим как  . Момент инерции I полого шара равен разности моментов инерции шара радиуса R и шара радиуса r:
. Момент инерции I полого шара равен разности моментов инерции шара радиуса R и шара радиуса r:

где ρ - плотность материала шара. Находим плотность, зная массу полого шара

Отсюда определим плотность материала шара

Так как

Для момента силы M получаем следующее выражение:

Пример 2.5. Тонкий стержень массой 300г и длиной 50см вращается с угловой скоростью 10с-1 в горизонтальной плоскости вокруг вертикальной оси, проходящей через середину стержня. Найдите угловую скорость, если в процессе вращения в той же плоскости стержень переместится так, что ось вращения пройдёт через конец стержня.
Решение
Используем закон сохранения момента импульса
 (1)
(1)
(Ji-момент инерции стержня относительно оси вращения).
Для изолированной системы тел векторная сумма моментов импульса остаётся постоянной. Вследствие того, что распределение массы стержня относительно оси вращения изменяется момент инерции стержня также изменяется в соответствии с (1):
J0ω1 = J2ω2. (2)
Известно, что момент инерции стержня относительно оси, проходящей через центр масс и перпендикулярной стержню, равен
J0 = mℓ2/12. (3)
По теореме Штейнера
J =J0 +m а 2
(J-момент инерции стержня относительно произвольной оси вращения; J0 – момент инерции относительно параллельной оси, проходящей через центр масс; а - расстояние от центра масс до выбранной оси вращения).
Найдём момент инерции относительно оси, проходящей через его конец и перпендикулярной стержню:
J2 =J0 +m а 2, J2 = mℓ2/12 +m(ℓ/2)2 = mℓ2/3. (4)
Подставим формулы (3) и (4) в (2):
mℓ2 ω1/12 = mℓ2 ω2/3
откуда
ω2 = ω1/4 ω2 =10с-1/4=2,5с-1
Пример 2.6. Человек массой m=60кг, стоящий на краю платформы массой М=120кг, вращающейся по инерции вокруг неподвижной вертикальной оси с частотой ν1=12мин-1, переходит к её центру. Считая платформу круглым однородным диском, а человека – точечной массой, определите, с какой частотой ν2 будет тогда вращаться платформа.
Дано: m=60кг, М=120кг, ν1=12мин-1 = 0,2с-1.
Найти: ν1
Решение: Согласно условию задачи, платформа с человеком вращается по инерции, т.е. результирующий момент всех сил, приложенных к вращающейся системе, равен нулю. Поэтому для системы «платформа-человек» выполняется закон сохранения момента импульса
I1ω1= I2ω2
где  - момент инерции системы, когда человек стоит на краю платформы (учли, что момент инерции платформы, равен
- момент инерции системы, когда человек стоит на краю платформы (учли, что момент инерции платформы, равен  (R – радиус п
(R – радиус п 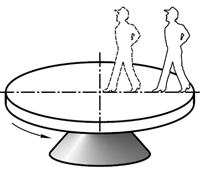 латформы), момент инерции человека на краю платформы равенmR2).
латформы), момент инерции человека на краю платформы равенmR2).
 - момент инерции системы, когда человек стоит в центре платформы (учли, что момент человека, стоящего в центре платформы, равен нулю). Угловая скорость ω1= 2π ν1 и ω1= 2π ν2.
- момент инерции системы, когда человек стоит в центре платформы (учли, что момент человека, стоящего в центре платформы, равен нулю). Угловая скорость ω1= 2π ν1 и ω1= 2π ν2.
Подставив записанные выражения в формулу (1), получаем

откуда искомая частота вращения

Ответ: ν2=24мин-1.
9 Теорема Штейнера

Рис. 4.8
Понять то, как меняется момент инерции при параллельном переносе оси, помогает теорема Штейнера. Рассмотрим произвольное твердое тело массы т в проекции, перпендикулярной оси вращения О, проходящей через центр масс тела (рис. 4.8). Рассмотрим другую произвольную ось вращения Ov параллельную оси О и расположенную на расстоянии а от нее.
Момент инерции относительно оси О равен

Аналогично момент инерции относительно оси О,

Воспользовавшись тем, что квадрат вектора равен квадрату его модуля и Ru =R{ + а, получим:

По определению центра масс последняя сумма равна нулю, откуда следует

Таким образом, доказана следующая теорема.
Теорема Штейнера: момент инерции тела относительно произвольной оси вращения равен сумме момента инерции этого тела, взятого относительно параллельной ей оси, проходящей через центр масс, и произведения массы тела на квадрат расстояния между осями.
Из теоремы Штейнера следует, что момент инерции минимален относительно оси, проходящей через центр масс тела.
Теорема позволяет, например, из формулы (4.19) вычислить момент инерции для тонкого стержня длины L, если ось вращения перпендикулярна стержню и проходит через его конец:

10 Уравнение динамики вращательного движения твердого тела
Рассмотрим вначале материальную точку А массой m, движущуюся по окружности радиусом г (рис. 1.16). Пусть на нее действует постоянная сила F, направленная по касательной к окружности. Согласно второму закону Ньютона, эта сила вызывает тангенциальное ускорение  илиF = m a τ.
илиF = m a τ.
Используя соотношение a τ = βr, получаем F = m βr.
Умножим обе части написанного выше равенства на r.
Fr = m βr 2. (3.13)
Левая часть выражения (3.13) является моментом силы: М= Fr. Правая часть представляет собой произведение углового ускорения β на момент инерции материальной точки А: J= m r 2.
Угловое ускорение точки при ее вращении вокруг неподвижной оси пропорционально вращающему моменту и обратно пропорционально моменту инерции (основное уравнение динамики вращательного движения материальной точки):
М = β J или  (3.14)
(3.14)
При постоянном моменте вращающей силы угловое ускорение будет величиной постоянной и его можно выразить через разность угловых скоростей:
 (3.15)
(3.15)
Тогда основное уравнение динамики вращательного движения можно записать в виде
 или
или  (3.16)
(3.16)
[  —момент импульса (или момент количества движения), МΔt — импульс момента сил (или импульс вращающего момента)].
—момент импульса (или момент количества движения), МΔt — импульс момента сил (или импульс вращающего момента)].
Основное уравнение динамики вращательного движения можно записать в виде
 (3.17)
(3.17)

Содержание
История

Бенуа Клапейрон
История возникновения понятия идеальный газ восходит к успехам экспериментальной физики, начало которым было положено в XVII веке. В 1643 г. Эванджелиста Торричелли впервые доказал, что воздух имеет вес (массу), и, совместно с В. Вивиани, провёл опыт по измерению атмосферного давления с помощью запаянной с одного конца стеклянной трубки, заполненной ртутью. Так появился на свет первый ртутный барометр. В 1650 г. немецкий физик Отто фон Герике изобрёл воздушный насос и провёл в 1654 году знаменитый эксперимент с магдебургскими полушариями, наглядно подтвердивший существование атмосферного давления. Эксперименты английского физика Роберта Бойля по уравновешиванию ртутного столба давлением сжатого воздуха привели в 1662 году к выводу газового закона, названного впоследствии законом Бойля — Мариотта[24], в связи с тем, что французский физик Эдм Мариотт в 1679 г. провёл аналогичное независимое исследование.
В 1802 году французский физик Гей-Люссак опубликовал в открытой печати закон объёмов (называемый в русскоязычной литературе законом Гей-Люссака)[25], однако сам Гей-Люссак считал, что открытие было сделано Жаком Шарлем в неопубликованной работе, относящейся к 1787 году. Независимо от них этот закон был открыт в 1801 году английским физиком Джоном Дальтоном. Кроме того, качественно он был описан французским учёным Гийомом Амонтоном в конце XVII века. Гей-Люссак также установил, что коэффициент объёмного расширения одинаков для всех газов, несмотря на общепринятое мнение, что разные газы расширяются при нагревании различным образом.
Гей-Люссак (1822)[26][27][28] и Сади Карно (1824)[29][30][28] были первыми, кто объединил в едином уравнении законы Бойля — Мариотта и Шарля — Дальтона — Гей-Люссака. Поскольку, однако, Гей-Люссак найденным им уравнением не пользовался, а с полученными Карно результатами знакомились не по его ставшей библиографической редкостью[31] книге «Размышления о движущей силе огня и о машинах, способных развивать эту силу»[32], а по изложению идей Карно в работе Бенуа Клапейрона «Мемуар о движущей силе огня»[33], то и вывод термического уравнения состояния идеального газа приписали Клапейрону[34][30], а уравнение стали называть уравнением Клапейрона, хотя сам этот учёный никогда не претендовал на авторство обсуждаемого уравнения[28]. Не вызывает, между тем, сомнения, что именно Клапейрон первый понял плодотворность применения уравнения состояния, существенно упрощавшего все связанные с газами расчёты.
Экспериментальные исследования физических свойств реальных газов в те годы были не вполне точны и проводились в условиях не сильно отличавшихся от нормальных (температура 0 ℃, давление 760 мм рт. ст.). Предполагалось также, что газ, в отличие от пара, представляет собой субстанцию, неизменную в любых физических условиях. Первый удар по этим представлениям нанесло сжижение хлора в 1823 г. В дальнейшем выяснилось, что реальные газы представляют собой перегретые пары, достаточно удалённые от областей конденсации и критического состояния. Любой реальный газ может быть превращён в жидкость путём конденсации, либо путём непрерывных изменений однофазового состояния. Таким образом выяснилось, что реальные газы представляют одно из агрегатных состояний соответствующих простых тел, а точным уравнением состояния газа может быть уравнение состояния простого тела. Несмотря на это, газовые законы сохранились в термодинамике и в её технических приложениях как законы идеальных газов — предельных (практически недостижимых) состояний реальных газов[35]. Уравнение Клапейрона было выведено при некоторых допущениях на основе молекулярно-кинетической теории газов (Августом Крёнигом в 1856 г.[36] и Рудольфом Клаузиусом в 1857 г.)[37]. Клаузиусом было введено и само понятие «идеальный газ»[38] (в отечественной литературе конца XIX — начала XX веков вместо названия «идеальный газ» использовали термин «совершенный газ»[39]).
Следующий важный шаг в формулировке термического уравнения состояния идеального газа — переход от индивидуальной для каждого газа постоянной к универсальной газовой постоянной — сделал русский инженер Илья Алымов[40][30][41], работа которого, опубликованная в малоизвестном среди физиков и химиков издании, не обратила на себя внимание. Этот же результат был получен Менделеевым в 1874 году[39][30][41]. Независимо от работ русских ученых Густав Цейнер[en] (1866)[42], Като Гульдберг (1867)[43] и Август Горстман[de] (1873)[44] пришли к выводу, что произведение индивидуальной для каждого газа постоянной в уравнении Клапейрона на молекулярный вес газа должно быть постоянной для всех газов величиной.
В 1912 году при выводе постоянной Нернста был впервые применён принцип разделения фазового пространства на равновеликие ячейки. Впоследствии в 1925 году Ш. Бозе опубликовал статью «Закон Планка и гипотеза о световых квантах», в которой развил эту идею применительно к фотонному газу. Эйнштейн сказал о данной статье, что «использованный здесь метод позволяет получить квантовую теорию идеального газа» [45]. В декабре того же года Энрико Ферми разработал статистику частиц с полуцелым спином, подчиняющихся принципу Паули, которые позднее назвали фермионами[46][47].
В отечественной литературе, изданной до конца 1940-х годов, термическое уравнение состояния идеального газа называли уравнением Клапейрона[48][49][50][51][52][53] или уравнением Клапейрона для 1 моля[54]. В фундаментальной отечественной монографии 1948 года, посвящённой различным уравнениям состояния газов[55], Менделеев — в отличие от Клапейрона — вообще не упоминается. Фамилия Менделеева в названии рассматриваемого нами уравнения появилась после начала «борьбы с низкопоклонством перед Западом» и поиска «русских приоритетов». Тогда-то и стали в научной и учебной литературе использовать такие варианты названия, как уравнение Менделеева[39][56], уравнение Менделеева — Клапейрона[57][58][59] и уравнение Клапейрона — Менделеева[56][60][61][62].
Классический идеальный газ
См. также: Уравнение состояния идеального газа
|
|
|

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2025 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

