

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Различают следующие эксплуатационные (статические) характеристики дизельной установки с ВФШ (рисунок 1.1):
1- внешняя, максимальной мощности - зависимость Nе(n)или момента Ме(n)при установке органа управления топливоподачей в неизменное положение, соответствующее кратковременным максимально допустимым значениям мощности и частоты вращения, т. е. на упоре максимальной (предельной) подачи топлива, когда hт = hт max;
2- внешняя, номинальной (полной) мощности - зависимость Nе(n)или момента Ме(n)при установке органов управления топливоподачей в положение, соответствующее номинальной мощности и частоте вращения (hт = hт ном = 100 %);
3 - частичные, долевых мощностей - зависимости Nе(n)или Ме(n)при установке органов управления топливоподачей в неизменные меньшие положения. При hт = 80 ÷ 90% характеристика является эксплуатационной;
4- ограничительная - зависимость максимально допустимых значенийNе(n)илиМе(n)при длительной работе дизеля с заданной частотой вращения и при сохранении постоянным (обычно номинальном) значении какого-либо параметра, определяющего предельное рабочее состояние дизеля.

Рисунок 1.1 – Характеристики дизельной установки с ВФШ:
(hт 1 > hт 2 > hт 3): а – зависимость Ne от ω; б – зависимость Ме от ω
Превышение этого значения может привести к отказу или даже аварии. Параметрами ограничения могут быть подача топлива hт (n), крутящий момент Ме(n)или мощность Ne(n), давление сгорания рн, давление наддува рн и др.
Ограничительная характеристика определяется допустимой тепловой или механической напряженностью дизеля. Обеспечение ограничительной характеристики в установке с дистанционным автоматизированным управлением (ДАУ) судов с ВФШ - осуществляется автоматически регулятором частоты вращения (РЧВ); в установках с ВРШ - программным регулятором нагрузки, который ограничивает подачу топлива по фактической частоте вращения в соответствии с заданной программой hт (n); путем воздействия на шаг винта. Однако программные ограничения, заложенные в системы ДАУ, не всегда удовлетворяют оптимальным условиям эксплуатации;
|
|
5 - минимально допустимой мощности - зависимость Ne min (n). или момента Мe min (n); определяется условиями устойчивой (без пропуска вспышек) работой топливной аппаратуры, а также состоянием двигателя;
6- регуляторная (нагрузочная) - зависимость n(Nв)или n(Мв)при постоянном значении п или при управлении топливо-подачей через астатический регулятор частоты вращения (ста-тизм, или степень неравномерности δ = 0);
7 - регуляторная - зависимость n(Nв)или n(Ме)при управлении топливоподачей через статический РЧВ и при фиксированном положении органа настройки частоты вращения; обычно статизм δ = (2 ÷ 6) %;
8- минимально допустимой частоты вращения - nmin (Ne) или nmin (Me) определяется величиной инерционных масс двигателя и условиями устойчивой работы топливной аппаратуры;
9 - 12 - винтовые, нагрузочные, представляющие зависимость Ne(n) илиMe(n) и являющиеся характеристиками сопротивления среды вращению гребного винта; Nc = kNn3, Mc= kMn2. При неизменных внешних условиях в стационарном, установившемся режиме
Nc = Ne; Mc = Me (1.2)
Винтовые характеристики определяют нагрузки для ГД, работающего на гребной винт. Положение этих характеристик зависит от условий движения судна, его скорости, параметров гребного винта, силы и направления ветра, степени волнения моря и глубины фарватера, состояния поверхности корпуса-судна или винта и других факторов, при изменении которых: меняется скорость судна и относительная поступь винта:
|
|
 , (1.3).
, (1.3).
где D - диаметр винта; υс — скорость движения судна.
Винтовые характеристики различают при ходе в свободной воде с номинальной осадкой (с грузом) (рисунок 1.1, кривая 9); при ходе в свободной воде с уменьшенной осадкой (легкий винт) (кривая 10); буксировочная — при ходе судна с возом или при перегрузке, при сильном обрастании корпуса, при ходе судна во льдах (тяжелый винт) (кривая 11); швартовная (при: работающих винтах и неподвижном судне) (кривая 12).
Ограничения нагрузочных и скоростных режимов вызваны предельно допустимыми тепловыми (рис. 1.1, кривые 1, 2, 4)и механическими (6, 8)нагрузками. Граница минимально устойчивой частоты вращения (8) лежит в пределах (0,2-0,5) nн.
Область эксплуатационных режимов ГД как энергетического агрегата ограничена на рис. 1.1 штриховыми линиями 4, 7,. 5, 8. В пределах этой области ГД может работать на любом
режиме без ограничения во времени при длительной эксплуатации. В переходных режимах при изменении задания частоты вращения или колебаниях нагрузки возможен кратковременный выход за пределы области эксплуатационных режимов. Область фактически используемых режимов работы ГД судов с ВФШ определяется заштрихованным участком между характеристиками 10 и 12(рис. 1.1, а и б).
Как следует из этого рисунка, работа ГД с ВФШ при использовании максимально допустимой в эксплуатации мощности (момента) ограничивается небольшим участком АВ характеристики 4. При дальнейшем уменьшении частоты вращения должна быть уменьшена мощность, т. е. возникает необходимость перехода на частичные характеристики мощности.
Наиболее тяжелым режимом работы ГД является швартовный. Для транспортных судов частота вращения в этом режиме nш = (0,65 ÷ 0,8)nн с дальнейшим выходом на ограничительную характеристику. Как правило, номинальная частота вращения достигается при Ne = (0,8 ÷ 0,9) Nвн.
Максимальный удельный расход топлива для ГД на режимах номинальной винтовой характеристики получают при Ne = (0,8 ÷ 0,9) Nвн. С целью достижения экономических режимов в эксплуатации не используют максимальную мощность дизеля и номинальную частоту вращения, а уменьшают последнюю до (0,94 - 0,97)nн. При этом повышаются надежность и ресурс ГД.
|
|
Наиболее сложными режимами работы ГД являются пуск при неподвижном судне и реверс при номинальной скорости судна.
Для исключения возможных перегрузок ГД при пуске рекомендуется специальная программа его нагрузки, которая должна закладываться в систему ДАУ (рисунок 1.2).
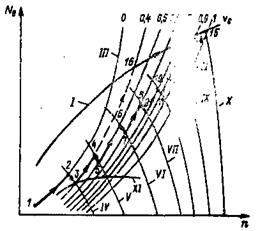
Рисунок 1.2 - Изменение нагрузки ГД в период разгона судна
/ — ограничительная характеристика; // — винтовая характеристика при номинальной загрузке судна; /// — швартовная характеристика; 1У-Х - регуляторные характеристики; XI — внешняя характеристика при пусковой hтп подаче топлива
Начинается пуск двигателя на воздухе при неподвижном судне, υс = 0, по швартовной характеристике (рисунок 1.2, участок 1-2)до регуляторной характеристики IV, соответствующей пусковой топливоподаче. По мере увеличения скорости судна нагрузка ГД уменьшается по характеристике IV(участок 2-3 ) до пересечения с соответствующей эксплуатационной винтовой характеристикой. В точке 3возможен устойчивый режим с минимальной частотой вращения и постоянной скоростью хода судна (в примере υс ≈ 0,4 υ сн). Дальнейшее увеличение скорости судна до требуемой (точка 15 ) осуществляется по ступеням путем воздействия на РЧВ и соответственно на рейку ТНВД. На каждой ступени должна делаться временная выдержка для достижения определенного прогрева ГД и устойчивой скорости судна при данной эксплуатационной винтовой характеристике.
В экстренных случаях сразу после пуска устанавливается топливоподача, соответствующая номинальной частоте вращения. Нагрузка двигателя происходит по винтовой характеристике от точки 3до точки 16и далее по ограничительной характеристике 1, при этом возможны кратковременные перегрузки дизеля. Увеличение топливоподачи до значения (0,6-0,8) n н не вызывает тепловых перенапряжений.
Процесс реверсирования ВФШ включает следующие этапы:
- свободное вращение гребного винта (при выключении подачи топлива) под действием инерции хода судна и набегающего потока с постепенным уменьшением частоты вращения;
- торможение вращения гребного винта под действием гидродинамических сил набегающего потока и контрвоздуха (до остановки винта); винт сначала работает в гидротурбинном режиме за счет инерции продолжающего двигаться судна;
|
|
- торможение хода судна путем вращения винта в противоположном направлении (до остановки судна);
- вращение винта, сообщающее судну движение назад. Процесс реверсирования ВФШ с заднего хода на передний происходит аналогично.
Зависимость момента сопротивления Мс от частоты вращения гребного винта п при изменении направления его вращения на противоположное отражается реверсивной характеристикой винта. Расчетная реверсивная характеристика строится при неизменной скорости судна в первоначальном направлении, поскольку время реверса гребного винта по крайней мере на порядок меньше времени реверса судна.
Реверсивные характеристики для разных значений первоначальной скорости судна υс показаны на рисунке 1.3 (кривая 2 ).
Процесс реверсирования гребного винта при любой скорости: судна состоит из трех режимов работы, тесно связанных с изменением нагрузки ГД: режима переднего хода I, торможения гребного винта II и режима торможения судна III.
В первом режиме после прекращения подачи топлива частота вращения дизеля и винта снижаются от номинальных nн на ходу судна и свободной воде с номинальной скоростью υсн (рисунок 1.3, точка А)до значения (0,6-0,75)nн , соответствующего нулевому моменту (точка В), т. е. когда кинетическая энергия, отдаваемая дизелем гребному винту, становится равной нулю.
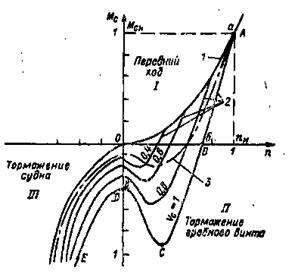
Рисунок 1.3 – Реверсивные характеристики гребного винта
1 – при ходе в свободной воде с номинальной осадкой (с грузом); 2 – реверсивные характеристики при различных υс = const; 3 – реальная реверсивная характеристика
Во втором, турбинном, режиме работы гребного винта, продолжающемся до остановки вала дизеля и гребного винта (точка D). За счет энергии набегающего потока винт продолжает вращаться в ту же сторону и на участке BCD сам развивает вращающий момент (отрицательный момент сопротивления). Режим включает две фазы работы гребного винта:
- без принудительного торможения в режиме гидротурбины; торможение винта происходит за счет суммарного момента трения дизеля и валопровода;
- торможение до остановки гребного винта сжатым воздухом (торможение контрвоздухом) после перестановки реверсивного устройства дизеля на обратное направление вращения сжатый воздух, поступая в цилиндры дизеля, создает отрицательный вращающийся момент по отношению к моменту, создаваемому винтом, и должен быть больше для обеспечения надежного и быстрого реверсирования движения судна.
|
|
При больших скоростях судна вращающий момент на участке ВСможет быть значительным, так при частоте вращения 0,35 nнон равен 0,9 Мсн(точка С).Винт затормаживается при моменте, равном примерно 0,4 Мсн (точка D) и начинает разворачиваться в противоположном направлении. Следует иметь в виду, что тормозной момент от контрвоздуха действует с некоторым запаздыванием относительно положения рукоятки поста управления.
Чем меньше длится второй режим, тем более эффективно торможение судна.
Третий режим длится с момента пуска дизеля на обратное направление вращения до достижения им заданной частоты вращения заднего хода. Создается интенсивное торможение судна. Гребной винт работает в режиме гидротормоза, развивая отрицательный упор за счет мощности дизеля на заднем ходу. Судно останавливается изатем начинается движение в обратном направлении.
Реальная реверсивная характеристика, учитывающая изменение скорости судна во время реверса, может иметь вид кривой 3(рисунок 1.3).
Как следует из рисунка 1.3, наибольшие нагрузки на ГД при реверсировании имеют место в режиме торможения хода судна. Поэтому нагрузку дизеля следует определять на основании совместного рассмотрения винтовых характеристик при торможении судна и характеристик дизеля. Цикл реверсирования гребного винта во времени может быть разделен на ряд характерных участков (рисунок 1.4):
I - от начала снижения частоты вращения винта а (выключение подачи топлива) с установившегося хода до начала гидротурбинного режима его работы б;
II - от начала гидротурбинного режима б до остановки винта г, в точке в подается контрвоздух;
III - от остановки винта г до достижения им частоты вращения, близкой к установившемуся режиму заднего хода д;
IV - от участка д до остановки судна е;
V - от участка е до достижения судном установившегося движения на заднем ходу ж.
Необходимость реверсирования горячего двигателя холодным воздухом, частые пуски при маневрировании вызывают неблагоприятные температурные напряжения, преждевременный износ подвижных соединений (один реверс равноценен по износу 10-12 часам работы ГД).
Рисунок 1.4 – Изменение скорости движения судна и частоты вращения
гребного винта при реверсировании
1.3 Особенности СЭУ с ВРШ и эксплуатационные режимы Одним из основных преимуществ ВРШ перед ВФШ заключается в том, что с его помощью можно изменить скорость и направление движения судна, не меняя направления вращения гребного винта и дизеля. Лопасти гребных винтов поворачиваются вокруг осей, перпендикулярных его оси. Остановка или изменение хода судна с переднего на задний (или наоборот) требуют изменения направления упора, создаваемого гребным винтом, что достигается за счет перестановки лопастей в положение, при котором угол атаки лопастей и развиваемый винтом упор становятся отрицательными, нулевыми или положительными. В этом случае не приходится преодолевать инерцию вращающихся масс винта и присоединенных к нему масс воды, вала, частей двигателя, благодаря чему процесс реверсирования протекает быстрее, а также снижаются перенапряжения в ГД. Кроме того, применение ВРШ сокращает период реверсирования судна за счет исключения времени, необходимого для реверсирования дизеля.
Постоянное направление, а иногда и постоянная частота вращения гребного винта позволяют в ряде случаев использовать энергию ГД для привода некоторых вспомогательных механизмов, в частности, валогенераторов и других приводов (например, мощных насосов).
Преимуществом судов с ВРШ является возможность использования полной мощности двигателя при изменяющихся условиях плавания, в том числе в процессе реверса и на заднем ходу, при любой скорости судна, как на самых малых, так и на других режимах работы.
Облегчаются условия работы ГД на маневровых режимах, что обусловлено следующим:
- пуск ГД производится при отключенном гребном винте (либо с нулевым упором винта, либо при нагрузке холостого хода за счет разобщения передачи);
- ГД могут быть хорошо прогреты в период подготовки к работе;
- изменение только шага гребного винта, не связанное с пуском и реверсами ГД, постоянная частота вращения вала ГД существенно повышают его надежность и моторесурс;
- при операции реверса судна ГД имеют минимальную нагрузку, так как реверс происходит с нулевым или близким к нулю упором.
Применение нереверсивных СОД, обладающих относительно малой металлоемкостью, позволяет сократить время прогрева, весьма значительное у МОД.
К основным недостаткам гребных установок с ВРШ относятся:
- более низкий КПД (на 0,5-3 %) по сравнению с ВФШ;
- пониженная надежность из-за большей вероятности поломок лопастей при попадании под винт плавучих предметов;
- сложность конструкций механизма привода лопастей и их крепления к ступице;
- возможность перегрузки дизеля при несогласованном управлении его частотой вращения и шагом винта;
большие трудозатраты по эксплуатации механизмов привода поворота лопастей, их крепления к ступице и т.п.
На судах с ВРШ изменение скорости судна и соответственно нагрузки дизеля может осуществляться воздействием на топливоподачу дизеля и на механизм изменения шага (МИШ) винта. Эта особенность СЭУ с ВРШ позволяет ставить задачи оптимизации режимов работы судов в различных условиях эксплуатации. При изменении шага винта (шагового отношения H/Dили относительной поступи винта  ) меняется вид винтовых характеристик нагрузки дизеля. Характеристики дизеля и область эксплуатационных режимов будут подобны характеристикам для судов с ВФШ (см. рисунок 1.1), однако область фактически используемых режимов в установках с ВРШ значительно расширяется по сравнению с ВФШ (рисунок 1.5; заштрихованная область).Из рисунка 1.5 следует, что с увеличением шага Hi или уменьшением относительной поступи
) меняется вид винтовых характеристик нагрузки дизеля. Характеристики дизеля и область эксплуатационных режимов будут подобны характеристикам для судов с ВФШ (см. рисунок 1.1), однако область фактически используемых режимов в установках с ВРШ значительно расширяется по сравнению с ВФШ (рисунок 1.5; заштрихованная область).Из рисунка 1.5 следует, что с увеличением шага Hi или уменьшением относительной поступи  кривые нагрузки Ne (n) смещаются вверх. В СЭУ с ВРШ изменением шага Н и частоты вращения п можно менять мощность в пределах допустимой зоны регулирования.
кривые нагрузки Ne (n) смещаются вверх. В СЭУ с ВРШ изменением шага Н и частоты вращения п можно менять мощность в пределах допустимой зоны регулирования.
-
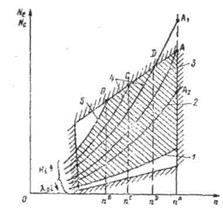
Рисунок 1.5 - Область фактически используемых режимов установок с ВРШ:
1 - винтовая характеристика, соответствующая нулевому углу поворота лопастей (шагу нулевого упора); 2 - то же соответствующая легкому винту: 3 - то же, соответствующая номинальной частоте вращения
и максимально допустимой мощности; 4 - то же, промежуточных шаговых отношений;
5 - то же, соответствующая наибольшему шагу винта при работе на швартовных.
Процесс реверса установки с ВРШ условно можно разделить на три этапа:
первый - изменение шага винта на противоположное по знаку. Поворот лопастей ВРЩ при постоянной частоте вращения (режим ПЧВ) дизеля приводит к изменению винтом мощности в широких пределах и может вызвать перегрузку (выход за ограничительную характеристику);
второй - торможение судна под действием создаваемого винтом упора, направленного в сторону, противоположную движению судна; этап заканчивается при остановке судна ( =0);
=0);
третий - повышение скорости судна в направлении, противоположном первоначальному.
Фактически первый и второй этапы начинаются одновременно.
На рисунке 1.6, а и б показано изменение параметров ГД и шага винта в процессе реверса при наличии на дизеле всережимного регулятора частоты вращения (ВРЧВ) с ограничением предельной подачи топлива упором на рейке ТНВД и при постоянной скорости перекладки лопастей.
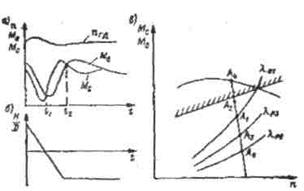 Рисунок 1.6 (а,б) - Изменение Ме, Мс, H / D,
nГДв процессе реверсирования в установках с ВРШ
Рисунок 1.6 (а,б) - Изменение Ме, Мс, H / D,
nГДв процессе реверсирования в установках с ВРШ
|
В начале первого этапа при переходе от характеристики  к характеристике нулевого упора
к характеристике нулевого упора  (рисунок 1.6, в) уменьшение шагового отношения H/Dприведет к снижению потребляемой винтом мощности. Частота вращения дизеля несколько увеличится, а развиваемый им крутящий момент Ме уменьшится в соответствии с регуляторной характеристикой (отрезок А1А0 на рисунке 1.6, в).
(рисунок 1.6, в) уменьшение шагового отношения H/Dприведет к снижению потребляемой винтом мощности. Частота вращения дизеля несколько увеличится, а развиваемый им крутящий момент Ме уменьшится в соответствии с регуляторной характеристикой (отрезок А1А0 на рисунке 1.6, в).
Скорость судна при этом изменится незначительно.
При дальнейшей перестановке лопастей упор становится вначале равным нулю ( ), а затем отрицательным (
), а затем отрицательным ( ). В момент, когда упор становится нулевым, начинается второй этап реверса.
). В момент, когда упор становится нулевым, начинается второй этап реверса.
Дальнейшее изменение шага винта происходит при отрицательном упоре. Скорость торможения судна и момент сопротивления винта при этом резко возрастают. Увеличивается и момент дизеля Ме, который может достичь величины, определяемой, например, точкой А2, а в общем случае может выйти на внешнюю характеристику (точка А4). При этом частота вращения несколько понизится, дизель будет находиться в области перегрузки.
После достижения шагом винта конечного значения момент Mс и упор вначале уменьшаются, затем возрастают до максимума и вновь снижаются до величины, определяемой конечным режимом. Частота вращения двигателя увеличивается, а момент Ме снижается и становится равным моменту винта Мс (точка Аз). Скорость судна уменьшается до нуля (начало третьего этапа), а затем возрастает в противоположном направлении до установившегося режима. Как следует из рисунка 1.6, а, на первом этапе до момента времени t1 Ме > Мс, что приводит к некоторому увеличению частоты вращения дизеля за счет появления избыточной мощности дизеля.
После момента времени ti наступает второй этап интенсивного торможения гребного винта, так как Мс > Ме, который оканчивается при t2. В этом режиме снижается частота вращения дизеля и возможна перегрузка дизеля. Далее на третьем этапе момент дизеля Ме становится больше момента сопротивления Мс при отрицательном упоре, т. е. Ме > Мс, частота вращения дизеля начнет несколько увеличиваться, увеличится и скорость судна.
Для получения минимального времени реверса рекомендуется:
- поддерживать частоту вращения вала ГД минимальной с начала перекладки лопастей до момента изменения знака шага винта и максимальной в течение всего остального времени реверса;
- изменять шаг винта с максимальной скоростью с начала перекладки лопастей до полной загрузки ГД по моменту и далее по закону, обеспечивающему работу дизеля с максимальными моментом и частотой вращения.
Вопросы для самопроверки:
1. Назовите преимущества ВРШ перед ВФШ
2. Назовите основные недостатки гребных установок с ВРШ
3. От чего изменяется вид винтовых характеристик нагрузки дизеля?
4. Опишите процесс реверса установки с ВРШ (три этапа)
5. Что необходимо делать для получения минимального времени реверса?
Судно как объект управления
Маневренные качества судна количественно определяются временем, в течение которого оно переводится из одного движения в другое с использованием предназначенных для этого судовых средств, и характеризуется: поворотливостью - способностью резко изменять курс и подвижностью - способностью резко изменять скорость. Время изменения скорости поступательного движения судна зависит от его динамических свойств и типа дизеля. В свою очередь динамика-судна определяет нагрузку дизеля. В дальнейшем рассматриваем судно как объект управления его поступательным движением, что существенно для анализа работы ДАУ. Движение судна описывается уравнением

| (1.4) |
где m — масса судна (с учетом присоединенной массы воды, кг); Ре( ) —эффективный упор гребных винтов (суммарная полезная тяга винта), кг*м/с-2; R(
) —эффективный упор гребных винтов (суммарная полезная тяга винта), кг*м/с-2; R( ) – сила сопротивления (воды и ветра) движению судна, кг*м/с-2;
) – сила сопротивления (воды и ветра) движению судна, кг*м/с-2;
Уравнение (1.4) является нелинейным. Для упрощения анализа динамики пропульсивного комплекса выполняют линеаризацию вблизи рабочей точки (установившегося режима) О:

где
 – фактор устойчивости судна.
– фактор устойчивости судна.
Дифференциальное линеаризированное уравнение судна относительно приращения скорости судна  имеет вид:
имеет вид:
 (1.5)
(1.5)
Переходя к относительным координатам  и
и  , где
, где  и
и  — базисные значения, в качестве которых принимаются максимальные или номинальные значения параметров, уравнение (1.5) может быть записано в двух формах:
— базисные значения, в качестве которых принимаются максимальные или номинальные значения параметров, уравнение (1.5) может быть записано в двух формах:
1-я форма
 (1.6)
(1.6)
где Тс = m / F с — постоянная времени судна;
 — коэффициент усиления по частоте вращения гребного вала;
— коэффициент усиления по частоте вращения гребного вала;
2-я форма
 , (1.7)
, (1.7)
где
 – время разгона судна;
– время разгона судна;
 – коэффициент самовыравнивания судна по возмущению.
– коэффициент самовыравнивания судна по возмущению.
На рисунке 1.7 показаны зависимости Pe (vc) и R (vc) при ω = const, откуда следует, что такой объект управления движением, как судно, является устойчивым объектом, так как в точке О установившегося режима F с > 0. Это во многом определяет динамику систем управления прямолинейным движением судна, его реверсом.
Судно является нейтральным (астатическим) объектом управления движением при рассмотрении вопросов, связанных с удержанием его на курсе, в частности при исследовании динамики авторулевых.
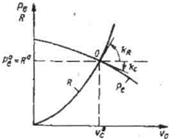 Рисунок 1.7. - Установившееся движение судна:
Рисунок 1.7. - Установившееся движение судна:
|
Передаточная функция судна как объекта управления движением в соответствии с (1.6)
 (1.8)
(1.8)
или из (1.5)
 , (1.9)
, (1.9)
где
 .
.
Вопросы для самопроверки:
1. Чем определяются маневренные качества судна?
2. Каким уравнением описывается движение судна?
3. Что выполняют для анализа динамики пропульсивного комплекса?
4. Чем определяется устойчивость судна как объекта управления
движением?
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!