Это один из первых универсальных ЭР с ПИД – законом регулирования, упрощенная схема которого показана на рисунке 3.8.
Подобный ЭР применен для регулирования частоты вращения в системе ДАУ ГД (на теплоходах «Котовский», «Владимир Ильич» и др.), а также в САРТ охлаждающей воды ГД и реализует как дискретные, так и аналоговые сигналы от соответствующих датчиков. Регулятор может быть использован как вторичный прибор в замкнутой системе управления какого-либо процесса, либо как каскадный усилитель сложной цепи управления или регулирования, изменяющий и дополняющий входной сигнал воздействием по интегралу и производной.
Сигнал U вх сравнивается с эталонным напряжением U ЭТ, которое устанавливается R 3. При рассогласовании этих напряжений появляется напряжение Δ U, которое подается в блок формирования закона регулирования через переключатель П1, меняющий знак Δ U. При одном положении П1 при увеличении U вх выходной сигнал U вых будет увеличиваться, в другом положении — уменьшаться.
Конденсатор С1 и резисторы R 6, R 4, R 5 образуют контур дифференцирования, постоянная времени которого регулируется резистором R 6. Диоды VD 1 и VD 2 выполняют функцию пороговых ограничителей сигнала на вход в промежуточный усилитель У1. Резисторы R 9 и R 8 образуют ЖОС, регулируемую R 8. Конденсатор СЗ и резистор R 8 образуют цепочку изодромной связи. Конденсатор С2 и резистор R 7 служат для введения в закон регулирования интегральной составляющей. Переключатель П2 имеет положение: «Автомат», «Ручное». Резистор R 10 в положении 2 управляет U вых и следовательно СД.
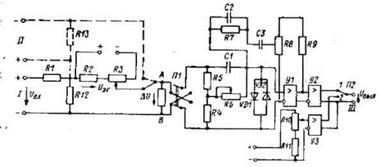
Рисунок 3.8 - Принципиальная схема электронного регулятора частоты вращения фирмы «Дженерал электрик»
I - аналоговый вход; II - дискретный вход: III - выход (к серводвигателю)
В зависимости от режима работы судна ЭР обеспечивает постоянную частоту вращения ГД (режим «Маневры») или постоянную топливоподачу (режим «В ходу»). В условиях маневров (аварийных режимах) ЭР сравнивает задающий сигнал с машинного телеграфа (МТ) с сигналом фактической частоты вращения от датчика частоты вращения. Рассогласование служит управляющим воздействием для изменения топливоподачи. В ходовых режимах задающий сигнал МТ воздействует непосредственно на следящую систему управления топливоподачей.
Электронный регулятор фирмы STL типа EGS -990. Регулятор является всережимным с ПИ-законом регулирования. Упрощенная функциональная схема этого ЭР приведена на рисунок 3.9. Регулятор стабилизирует либо частоту вращения, либо положение рейки ТНВД (топливоподачу) и применяется в составе ДАУ ГД. При управлении по стабилизации положения рейки ТНВД ограничивается максимальная частота вращения, при управлении по стабилизации частоты вращения ограничивается максимальное положение рейки ТНВД.
Сигнал требуемой частоты вращения oт MT поступает к избирателю минимума через низкочастотный фильтр 1, который уменьшает влияние внезапного изменения частоты вращения. Из двух сигналов: задания частоты вращения от МТ и установки максимума частоты вращения (max n) к ПИ-регулятору 3 поступает меньший благодаря минимальному селектору 2. На вход блока 3 подается разность сигналов заданной частоты вращения и действительной. Выходной сигнал от блока 3 поступает в электронный блок 4 винтовой характеристики ГД, где корректируется в соответствии с видом кривой NC { n).
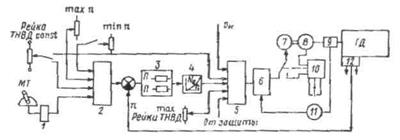
Рисунок 3.9 - Функциональная схема электронного регулятора EGS-990
1 - низкочастотный фильтр; 2. 5 - избиратель минимума; 3 —ПИ-регулятор; 4 — электронный блок; 6 — блок управления СД; 7 - СД; 8 —электромагнитный выключатель; 9 — редуктор; 10 — ручное аварийное управление; 11 — датчик положения рейки ТНВД; 12 - датчик частоты вращения ГД.
Скорректированный сигнал or блока 4 поступает в селектор минимума 5, где выбирается наименьший по величине из следующих сигналов: ограничение по максимально допустимому положению рейки ТНВД (max n); коррекция по давлению воздуха наддува, обеспечивающего точное регулирование топливоподачи (положения рейки ТНВД), соответствующее давление воздуха в системе наддува. Кроме того, через селектор минимума 5 можно задать любую установку постоянного положения рейки ТНВД при работе регулятора в режиме фиксированного значения рейки ТНВД (const). На селектор 5 подается сигнал на остановку ГД при достижении валом дизеля предельно допустимой частоты вращения. В систему управления вводится сигнал от системы защиты ГД, контролирующей исправность основных элементов регулятора.
Выходной сигнал от блока 5 является результирующим для задания положения рейки ТНВД блоком 6 посредством СД 7. В блоке 6 сигнал задания сравнивается сфактическим положением рейки ТНВД от датчика 11.
На валу СД установлен электромагнитный выключатель 8 для отключения регулятора в случае его неисправности, причем положение рейки ТНВД, предшествовавшее аварии, сохраняется. Аварийное управление положением рейки ТНВД может осуществляться вручную с помощью блока 10. СД 7 регулятора представляет собой электродвигатель постоянного тока с редуктором 9. К блоку управления 6 через минимальный селектор 5 подключена защита от системы, контролирующей исправность основных элементов и параметров ГД.
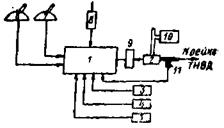
Рисунок 3.10 - Упрощенная схема электронного регулятора типа DGU-8800
1 - электронный блок; 3 — пневматический СД; 3 — блок защиты; 4 — датчик частоты вращения п; 5 — датчик давления наддува рн; 6 — писимитический блок питания; 7 – машинный телеграф на мостике; 8 — пост управления пневмоцилиндра; 9 — электропневмопреобразователь; 10 – электрический блок питания; 11 – датчик положения поршня пневмоцилиндра.
Электронный регулятор частоты вращения фирмы «NOR - CONTROL» типа «DGU -8800». Электронный регулятор типа «DGU-880O» выполнен на базе микропроцессора типа «INTEL-8088» и предназначен для регулирования и поддержания заданной частоты вращения вала ГД. Регулятор работает совместно с системой ДАУ типа «AUTOCHIEF-III» и позволяет оптимизировать переходные процессы топливоподачи и частоты вращения вала ГД.
На основе данных о максимальной длительной мощности, числе цилиндров и моменте инерции маховых масс МКП производит расчет и установку настроечных параметров регулятора для каждого скоростного режима судна. Для предотвращения тепловых перегрузок в память ЭР записаны ограничительные характеристики топливоподачи в зависимости от частоты вращения и давления наддува. Предусматривается возможность изменения оператором настроечных параметров, например, для оптимизации процесса регулирования в штормовых условиях, а также введение зоны нечувствительности («мертвой зоны») регулятора, исключающую регулирование в запрограммированном диапазоне частоты вращения, меняющуюся под воздействием волнения (волновой фильтр).
На рисунке 3.10 показана упрощенная схема управления ГД рассматриваемым регулятором. В электронный блок 1 поступает информация от датчиков частоты вращения вала ГД 4, давления наддува 5 и положения поршня пневмоцилиндра 9 (положения рейки ТНВД—топливоподача). Информация преобразуется в двоичный код и обрабатывается в соответствии с заложенной программой. МКП в электронном блоке 1 формирует управляющий сигнал топливоподачи на электропневмопреобразователь 11 и пневматический СД2, обеспечивая две скорости перемещения рейки ТНВД. Управление может осуществляться от МТ 7 на мостике и поста управления 10 в ЦПУ. В электронный блок поступают также сигналы от блока защиты 3. Регулятор имеет четыре основных режима работы:
нормальный режим, в котором выполняются все заложенные функции, обрабатывается входная информация и выдается управляющий сигнал на СД. Регулятор автоматически переходит в данный режим при перемещении МТ или поста управления из положения «Стоп» в любое другое;
режим готовности, в котором находится ЭР при подаче на него питания и в положении рукоятки ПУ на «Стоп». В этом режиме возможно перепрограммирование любого параметра регулятора и запись его в память МКП;
режим испытания и настройки, служащий для проверки работоспособности ЭР путем подмены информации от датчиков имитационными сигналами;
режим самопроверки, в который ЭР может перейти только из режима готовности.
При возникновении неисправности в регулирующей части электронного блока предусматривается управление топливоподачей из ЦПУ, которая зависит от положения ПУ и не зависит от частоты вращения.
Регулятор температуры на судах типа «Евгений Мравинский». Для регулирования температуры используется семейство приборов Ursacord—Compact—Combination (Германия), состоящих из регулирующих, управляющих, индикаторных и измерительных устройств. Приборы применяются для регулирования температуры в контурах охлаждающей воды поршней и цилиндров ГД, а также смазочного масла. Для дизель-генераторов — в контуре охлаждения. Принципиально регулирование температуры осуществляется методом регулируемого перепуска воды, смешения охлажденной воды с нагретой. Изменение температуры преобразуется в изменение сопротивления платинового терморезистора, имеющего 100 Ом при  = 0°С. Температурный коэффициент 3,85± 0,012.10-3 град-1. Напряжение источника постоянное, равное 6 В.
= 0°С. Температурный коэффициент 3,85± 0,012.10-3 град-1. Напряжение источника постоянное, равное 6 В.
Упрощенная функциональная схема регулирования температуры показана на рисунке 3.11. Терморезистор 1 подключается к измерительному преобразователю 3. Входной сигнал обрабатывается в схеме согласования диапазонов измерений, преобразуется усилителем постоянного тока с прерывателем в переменное напряжение, усиливается и выпрямляется. Преобразованное напряжение поступает на регулятор и подается на усилитель 5. Одновременно с блока 3 сигнал поступает на магнитоэлектрический прибор измерителя температуры  °.
°.
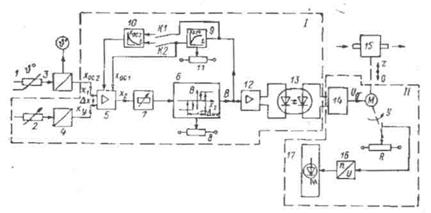
Рисунок 3.11 - Упрощенная функциональная схема регулирования температуры
1 — терморезистор; 2 — регулятор заданного значения температуры; 3 — измерительный преобразователь; 4 — калибровка истинного и заданного значения температуры; 5 – дифференциальный усилитель; 6 — релейный усилитель (трехпозиционный); 7 — регулировка коэффициента усиления регулятора kP; 8 — регулировка зоны нечувствительности ΔНЧ; 9 — интегрирующее звено; 10 — дифференцирующее звено; 11 — регулировка постоянной интегрирования; 12 — усилитель выходного каскада; 13 — оптический выходной каскад; 14 — блок управления электродвигателем М сервомеханизма; 15 — двухходовой регулирующий клапан; 16 — измеритель, усилитель и кодирующее устройство (напряжение — количество U 1 K); 17 — индикация открытия регулирующего клапана z — закрытие; о — открытие; R — дистанционный датчик положения регулирующего клапана
Hа усилитель 5 регулятора I также подается заданное значение температуры, имитируемое регулируемым резистором 2 и блоком калибровки 4.
Разность напряжений заданного и истинного значения температуры поступает на трехпозиционный релейный усилитель 6 с зоной нечувствительности Δнч, которая регулируется резистором 8. Коэффициент усиления kp усилителя 6 регулируется резистором 7. Для стабилизации динамического процесса в регуляторе применены обратные связи, интегральная 9 и дифференциальная 10, которые могут выборочно подключаться к усилителю 6. Постоянная интегрирования ТИ регулируется резистором 11. Сигнал с релейного усилителя 6 поступает в усилитель выходного каскада 12 и далее в оптический выходной каскад 13. Сигнал рассогласования отмечается загоранием желтым цветом одного из светодиодов на приборе управления в зависимости от знака рассогласования.
В рассматриваемых регуляторах существует жесткая связь между постоянной интегрирования Ти и постоянной дифференцирования ТД. Переключателем на корпусе регулятора можно установить два диапазона регулирования: l-й диапазон ТИ = (3÷66) с, ТД = 1/4Ти; 2-й диапазон – Ти=(68÷1500) с, Тд = 1/4ТИ. Зона нечувствительности ΔНЧ может быть установлена в пределах 0,5—5 % диапазона регулирования.
Коэффициент усиления kP устанавливается в пределах 0,33 – 10.
10. 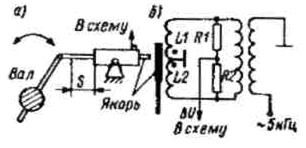
Рисунок 3.12 – Датчик фактического наполнения (датчик нагрузки):
а – индуктивный датчик; б – электрическая схема
В автоматическом режиме сигнал, образуемый регулятором I, подается через внешний оптический элемент связи к блоку управления II сервомеханизмом типа «Климант».
При поступлении сигнала на электродвигатель М сервомеханизм открывает или закрывает двухходовой регулирующий клапан 15, обеспечивая изменение температуры охлаждающих сред до установленного на датчике 2. Одновременно изменяется встроенное в сервомеханизм II сопротивление R, сигнал с которого поступает в блок 16, где измеряется, усиливается и кодируется. Напряжение, пропорциональное степени открытия двухходового вентиля, превращается в код, воздействующий на индикатор 17, содержащий 24 светящихся зеленым цветом люминесцентных диода. Количество зажженных диодов информирует о степени открытия регулирующего клапана 15.
В управляющем устройстве II находится переключатель работ с автоматического на ручной режим. Там же находятся два светодиода желтого цвета, каждый из которых сигнализирует о наличии рассогласования истинного и заданного значения температуры и знаке рассогласования.
Датчик фактического значения наполнения (топливоподачи). Датчик фактического значения наполнения (топливоподачи), или датчик нагрузки (ДН), состоит из индуктивного датчика перемещения рейки ТНВД (рисунок 3.12) и электронного измерительного усилителя, упрощенная функциональная схема которого показана на рисунок 3.13.
Рассмотрим ДН, установленный в системе ДАУ ВРШ на судах типа LO - RO «Евгений Мравинский» (рисунок 3.12). Электрическая схема ДН представляет собой чувствительный элемент в защитном корпусе. Чувствительный элемент выполнен в виде мостовой дроссельной схемы переменного тока с подвижным якорем, связанным с рейкой ТНВД. При перемещении якоря на величину S, в зависимости от количества подаваемого топлива, меняется магнитная проницаемость и соответственно индуктивность неподвижных катушек L 1 и L 2, находящихся в корпусе ДН. Катушки включены в два плеча моста, в двух других — резисторы с сопротивлением R 1 и R 2. При изменении положения рейки ТНВД появляется напряжение разбаланса моста Δ U, которое поступает в схему для его измерения и обработки и далее на соответствующие индикаторы и в схему ДАУ ВРШ типа AFA-5011 (рисунок 3.13). Между перемещением якоря S и выходным напряжением U измерительного усилителя после калибровки существует линейная зависимость, т.е.  и
и  , где k 1 и к2 – коэффициенты пропорциональности, Ме — эффективный момент ГД;
, где k 1 и к2 – коэффициенты пропорциональности, Ме — эффективный момент ГД;  – положение рейки ТНВД.
– положение рейки ТНВД.
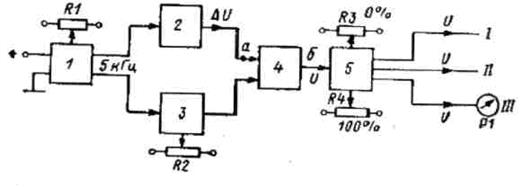
Рисунок 3.13 – Схема измерения топливоподачи (нагрузки) в системе ДАУ ВРШ
типа AFA-5011
На рисунок 3.13 датчик нагрузки представлен блоком 2. Синусоидальное напряжение с частотой 5 кГц генерируется в RC-генераторе блока 1 и питает мостовую схему чувствительного элемента в ДН (блок 2). Величина напряжения регулируется сопротивлением R 1. Напряжение рассогласования  подается на фазочувствительный выпрямитель (усилитель) 4. Напряжение в точке а сдвинуто по фазе по отношению к питающему мост напряжению, поэтому напряжение блока 3 должно также изменить свою фазу. Это обеспечивается фазовращательным звеном в блоке 3. С помощью резистора R 2 производится точная подстройка фазового угла.
подается на фазочувствительный выпрямитель (усилитель) 4. Напряжение в точке а сдвинуто по фазе по отношению к питающему мост напряжению, поэтому напряжение блока 3 должно также изменить свою фазу. Это обеспечивается фазовращательным звеном в блоке 3. С помощью резистора R 2 производится точная подстройка фазового угла.
Фазовращательный усилитель 3 управляет фазочувствительным выпрямителем 4. В блоке 3 синусоидальное напряжение преобразуется в напряжение прямоугольной формы и отрицательный сигнал, в результате чего на выходе блока 4 в точке б появляется постоянное напряжение U, величина которого пропорциональна положению рейки ТНВД, т.е. наполнению.
В блоке 5 сигнал U калибруется. Установка нулевого значения фактического наполнения осуществляется резистором RS, установка предельной величины фактического наполнения — потенциометром R4, при этом регулируется коэффициент усиления сигнала.
В блоке 4 сигнал разделяется на три канала: канал I — для подключения индикаторных приборов, канал II подает сигнал о величине нагрузки ГД (топливоподаче) к схеме ДAУ ВРШ типа AFA-5011, канал III контролирует питающее напряжение и величину напряжения U в соответствии с имеющимся значением наполнения. Измеренные величины контролируются прибором Р1 с помощью переключателя.
Электронный импульсный регулятор фирмы «Плайгер». Схема ЭР фирмы «Плайгер» типа 362 приведена на рисунке 3.14. Такой регулятор применяется на судах типа «Норильск» в контурах регулирования, в частности в качестве регулятора температуры масла дизель-генераторов. Подобные регуляторы предназначены для использования на объектах с медленно протекающими процессами, поэтому в качестве серводвигателя исполнительного механизма применен электродвигатель.
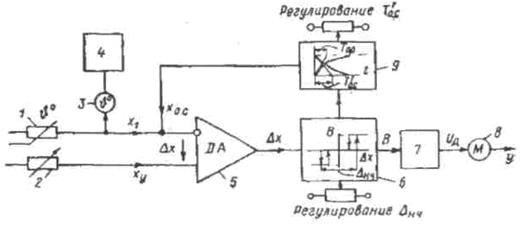
Рисунок 3.14 – Электронный импульсный регулятор фирмы «Плайгер»
1 – датчик текущей температуры; 2 – датчик установки температуры; 3 – измерительный преобразователь; 4 – сигнализатор; дифференциальный усилитель; 6 – релейный усилитель; 7 – выходной блок; 8 – электродвигатель ИМ; 9 – блок обратной связи
Регулятор является трехпозиционным ПИ-релейным усилителем. Принципиальная схема регулятора аналогична схеме регулирования температуры на судах типа «Евгений Мравинский» (рис. 3.11).
При отличии сигналов х1 (пропорционального текущей контролируемой температуре от датчика I) и ху (от датчика уставки температуры 2) появляется их разность ±Δ х. Если величина |Δ х | больше половины зоны нечувствительности Δнч трехпозиционного реле 6, то дифференциальный усилитель 5 включит реле. Через выходной каскад 7 получает питание электродвигатель М, воздействующий на регулирующий орган, меняющий сигнал х1 всторону ликвидации Δ х. Выходная координат y релейного усилителя изменяется, как показано на рисунке 3.14, осуществляя импульсное регулирование электродвигателем до исчезновения рассогласования Δ х.
На рисунке 3.15 показаны изменения во времени выходного сигнала релейного регулятора, вызванные ступенчатым изменением сигнала Δ х, величиной зоны нечувствительности Δнч и постоянными времени обратной связи То.с. и  , а соответственно и постоянной интегрирования T ри.
, а соответственно и постоянной интегрирования T ри.
Параметры автоколебательного режима при разных способах настройки будут различными. Начальная реакция регулятора характеризуется линией Оа и определяется постоянной времени обратной связи То.с., характеризующей изменение сигнала y 1.
Интегральная составляющая определяется настроечными параметрами, в качестве которых используется зона нечувствительности Δнч и постоянная времени  . Величина устанавливается в зависимости от инерционных свойств объекта регулирования, причем больше, чем постоянная То.с.. В зависимости от настроечных параметров меняется характеристики импульсного регулирования
. Величина устанавливается в зависимости от инерционных свойств объекта регулирования, причем больше, чем постоянная То.с.. В зависимости от настроечных параметров меняется характеристики импульсного регулирования  и t П. При возвращении регулируемой величины к своему заданному значению импульсное регулирование электродвигателем М прекратится.
и t П. При возвращении регулируемой величины к своему заданному значению импульсное регулирование электродвигателем М прекратится.

Рисунок 3.15 – Характеристики ПИ релейного регулятора в зависимости от изменения:
а – величины ступенчатого значения рассогласования Δx(Δx1 > Δx2 >Δx3; б – зоны нечувствительности
Регулятор температуры R 301. На судах типа «Астрахань» для автоматического регулирования температуры охлаждающей воды, масла и воздуха применяется трехпозиционный релейный регулятор R301, упрощенная функциональная схема которого представлена на рисунок 3.16. САР температуры работает по принципу отклонения в ручном и автоматическом режимах в зависимости от положения переключателя режимов. В ручном режиме над а иное значение температуры устанавливается и поддерживания вахтенным механиком с помощью дистанционного управления исполнительным двигателем M 1, который перемещает регулируемый орган (РО) — трехпроточный клапан — в сторону увеличения или уменьшения количества охлаждающей воды.
В автоматическом режиме измерительный преобразователь 3 измеряет текущее значение температуры при помощи датчика температуры 1, преобразуя его в сигнал х y, который сравнивается с сигналом уставки ху заданной температуры в дифференциальном усилителе DA 1. В качестве датчика температуры используется терморезистор Pt 100. Электронная часть регулятора собрана на отдельных печатных платах (картах) L 110, L 115 — L 118. Выходной сигнал с DA 1 Δ х = х1 - ху поступает на карты L 116, L 117 и на исполнительный электродвигатель M1, на карту L 115, сигнализирующую о превышении установленного уровня отклонения от заданной температуры, и на карту L 110 и на исполнительный электродвигатель М2.
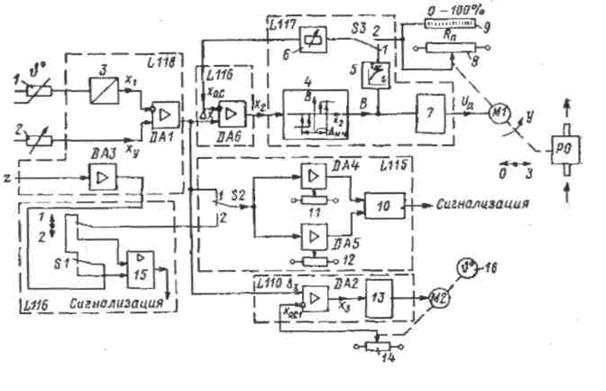
Рисунок 3.16 – Упрощенная функциональная схема регулятора температуры R301
1 – датчик текущей температуры; 2 – датчик установки температуры; 3 – измерительный преобразователь; 4 – релейно-импульсный регулятор; 5 – интегратор; 6 – регулировка коэффициента усиления регулятора; 7 – блок управления электродвигателем М1 исполнительного механизма; 8 – датчик положения РО; 9 – указатель положения РО; 10 – блок сигнализации; 11, 12 – регулирование верхнего и нижнего уровней параметра; 13 – блок управления электродвигателем М2 индикатора температуры; 14 – резистор обратной связи индикатора температуры; 15 – дифференциальный усилитель на транзисторах; 16 – индикатор температуры.
В карге L 116 линейный операционный усилитель DA 6 выполняет функции сравнения и усиления двух сигналов: сигнала, пропорционального рассогласования Δ х и сигнала обратной связи х о.с. Результирующий сигнал х2 через блок калибровки, настройки и усиления (на рисунке 3.16 не показан) поступает на вход релейного усилителя и если х2 > АНЧ/2, на блок управления электродвигателем 7 подается сигнал равный В. С блока 7 сигнал у воздействует на электродвигатели и далее на регулируемый орган.
В зависимости от вида обратной связи осуществляется либо П-закон управления (переключатель S3 находится в положении 2), либо ПИ-закон управления (переключатель S3 находится в положении 1). В последнем случае в цепь обратной связи включается интегратор 5.
При П-законе управления на вход DA 6 поступает сигнал х о.с, пропорциональный перемещению РО потенциометра R П. С этого потенциометра сигнал заводится также на указатель положения клапана 9. Карта L 115 содержит два компаратора, собранных на операционных усилителях DA 4, DA 5 и блок сигнализации 10, содержащий транзисторные усилители и реле, включающие сигнализацию при отклонении контролируемого параметра от заданного в пределах ±(2÷22)°С. Зона регулируется, верхний уровень устанавливается резистором 11, нижний - 12.
Карта L 110 содержит следящую систему управления указателем температуры 16. Усилитель DA 2 работает в режиме компаратора, где сравниваются два сигнала: сигнал пропорционального рассогласованию Δ х и сигнал обратной связи хо.с с резистора 14, характеризующего текущее значение температуры. Сигнал  усиливается в транзистор но-релейном блоке 13, двухфазный двигатель М2 получает питание и перемещает движок резистора 14 в сторону ликвидации сигнала х3. Указатель температуры займет положение, соответствующее новому значению температуры. Данная система управления является астатической.
усиливается в транзистор но-релейном блоке 13, двухфазный двигатель М2 получает питание и перемещает движок резистора 14 в сторону ликвидации сигнала х3. Указатель температуры займет положение, соответствующее новому значению температуры. Данная система управления является астатической.
В схеме предусматривается введение в регулятор переключателем S 2 внешнего возмущающего воздействия z, в качестве которого может быть, например, положение топливной рейки, косвенно характеризующие нагрузку ГД. температура забортной воды и т.п. Введение сигнала по возмущению позволяет значительно раньше дать предупреждение о критическом отклонении температуры от заданного значения.
Для ускорения срабатывания тревожной сигнализации при выходе параметра за установленные пределы дифференциальный усилитель 15 может включаться в цепь передачи сигнала внешнего возмущения z.
Цифровой электронный регулятор с ПИД-законом управления. В последние годы на судах для автоматического регулирования различных процессов энергетических установок широко используется универсальный регулятор NAF ЕСА 30. Он применяется в контурах регулирования давления, частоты вращения, вязкости, температуры и т. п. Электронный регулятор имеет аналоговый вход. Коэффициент усиления может меняться в пределах от 0,2 до 40, постоянная интегрирования — от 1,5 до 1500 с, постоянная дифференцирования — от 0 до 600 с. Диапазон параметров может быть либо увеличен в 10 раз, либо уменьшен также в 10 раз. Предусматривается возможность положительной работы регулятора, т. е. с увеличением сигнала на входе сигнал на выходе увеличивается (прямой режим), и наоборот, с увеличением сигнала на входе сигнал на выходе уменьшается (обратный режим). Упрощенная структурная схема регулятора показана на рисунке 3.17.
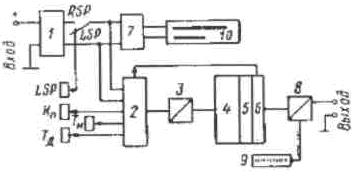
Рисунок 3.17 – Структурная схема регулятора NAF ECA30
1 – входной блок, калибровка сигнала; 2 – аналоговый многоканальный модулятор;
3 -аналого-цифровой преобразователь; 4 – микропроцессор; 5 – блок долговременной памяти;
6 – блок оперативной памяти; 7 – привод индикатора ленточной шкалы; 8 -цифро-аналогоый преобразователь; 9 - индикатор выходного сигнала; 10 – светящаяся ленточная шкала
Аналоговые сигналы измеряемых параметров или установок через входные колибровочные блоки 1 поступают на многоканальный модулятор 2 и к светящейся шкале 10. Последовательность операций регулятора устанавливается микропроцессором 4 по программе, хранящейся в блоке долговременной памяти 5. Программа задает несколько определенных режимов, например, режим аналого-цифрового преобразования (АЦП) 3, режим ПИД- или ПИ-регулировання (в обратном режиме) и т.д. Микропроцессор посылает код номера ячейки к аналоговому многоканальному модулятору 2. Измеренная величина выходного сигнала поступает на АЦП и далее в блок 6 оперативной памяти. Затем автоматически подключается другой входной сигнал.
Результат обрабатывается в соответствии с ПИД-алгоритмом программы в блоке 6 и затем преобразовывается вновь, в аналоговый сигнал в цифроаналоговом преобразователе 8. Величина выходного сигнала высвечивается на индикаторе 9.
Регулятор имеет несколько переключателей: по усилению, направлению действия, местной (LSP) или дистанционной: (RSP) установке регулируемой величины и т.д. Оптимальные значения настроечных параметров регулятора — коэффициента усиления, времени интегрирования и времени дифференцирования – определяют после подключения регулятора к объекту регулировании.
Вопросы для самопроверки:
1. Какие преимущества имеют электронные регуляторы?
2. Какие применяются электрические автоматические регуляторы в практике?
3. Назначение универсального электронного ПИД-регулятора фирмы Дженерал-Электрик
4. В чем назначение электронного регулятора фирмы STL типа EGS-990?
5. Какие задачи электронного регулятора частоты вращения фирмы NOR CONTROL типа DGU-8800?






