

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ
И СИСТЕМЫ VOR
Учебное пособие
г. Кировоград
2009 г.
УДК 629.7.05
ББК
Радиомаячные системы посадки и системы VOR: Учебное пособие./ Сост.: А.В. Хафизов – Кировоград: ГЛАУ, 2009. – 83 с.
В данном пособии рассмотрены вопросы назначения, размещения и принципа работы наземного оборудования радиомаячной системы посадки, и системы VOR (стандартные и доплеровские VOR), особенности работы систем, основные тактико-технические данные. В качестве измерителя информационного параметра рассмотрена современная аппаратура КУРС
МП-70. Пример расчета линейного отклонения самолета от траекторий посадки, приведенный в приложении, наглядно демонстрирует взаимосвязь: угловое отклонение – положение стрелки (планки) индикатора – линейное отклонение.
Предназначено для курсантов факультета летной эксплуатации при изучении оборудования в соответствии с учебной программой «Радиооборудование воздушных судов».
Ил., литературных источников – 4.
Рецензент: В.А. Тузов, доцент, к.т.н., зав. каф.
Рассмотрено и рекомендовано для издания и использования в учебном процессе решением кафедры авиационного оборудования ГЛАУ, протокол от 13.01.09 г., № 5.
© Хафизов А.В., 2009 г.
Учебное пособие, 2009
© Компьютерная верстка.
Изд-во ГЛАУ, 2009
СОДЕРЖАНИЕ
стр.
Введение………………………………………………………………………………
1. Назначение, состав, классификация по категориям…………………………….
2. Размещение наземного оборудования на аэродроме……………………………
3. Принцип работы канала курса (стандарт ILS, 1, 2 и 3 категорий)……………..
3.1 Принцип действия…………………………………………………………….
3.2 Формирование поля излучения в КРМ стандарта ILS 1 категории………
|
|
3.3 Формирование поля излучения в КРМ стандарта ILS 2 категории..............
3.4 Формирование поля излучения в КРМ стандарта ILS 3 категории……….
3.5 Принцип работы бортового оборудования канала курса………………….
4. Принцип работы канала глиссады (стандарт ILS, 1, 2 и 3 категорий)…………
4.1 Принцип действия…………………………………………………………….
4.2 Формирование поля излучения в ГРМ стандарта ILS 1 категории………..
4.3 Формирование поля излучения в ГРМ стандарта ILS 2 категории………..
4.4 Формирование поля излучения в ГРМ стандарта ILS 3 категории………..
4.5 Принцип работы бортового оборудования канала глиссады………………
5. Особенности формирования поля излучения в КРМ стандарта СП-50………..
6. Особенности формирования поля излучения в ГРМ стандарта СП-50………..
7. Принцип работы маркерного канала…………………………………………..…
7.1 Принцип работы МРМ……………………………………………………….
7.2 Принцип работы бортового оборудования маркерного канала……………
8. Нормы ICAO на основные тактико–технические данные (ТТД) ………………
наземного оборудования РМС посадки………………………………………….
8.1 Курсовой радиомаяк ILS 1, 2 и 3 категорий………………………………..
8.2 Глиссадный радиомаяк ILS 1, 2 и 3 категорий……………………………..
8.3 Маркерный радиомаяк……………………………………………………….
9. Система VOR……………………………………………………………………….
9.1 Состав, назначение, решаемые задачи ……………………………………...
9.2 Принцип работы………………………………………………………………
9.3 Принцип работы доплеровского радиомаяка (DVOR)……………………..9.3.1 Принцип действия DVOR……………………………………………..9.3.2 Принцип работы DVOR……………………………………………….9.4 Принцип работы бортового оборудования…………………………………9.5 Нормы ICAO на основные тактико-технические данные системы VOR……………………………………………………………………………10. Принцип построения бортового оборудования РМС посадки………………..
11. Аппаратура КУРС МП-70……………………………………………………….
|
|
Литература……………………………………………………………………………
Приложения…………………………………………………………………………..
Расчет линейного отклонения самолета от траектории посадки………………….
А. Методика расчета линейного отклонения самолета от линии курса………
Б. Расчет линейной величины искривлений линии курса Δкрм, (м)………….
В. Методика расчета линейного отклонения самолета от линии глиссады
планирования………………………………………………………………………
Г. Расчет линейной величины искривлений линии глиссады Δгрм, (м)…….…
Введение
Этап посадки самолета является одним из самых важных и сложных этапов полета. На этом этапе экипаж должен выдерживать линию посадочного курса и глиссаду снижения, формируемые специальным оборудованием, называемого радиомаячной системой посадки (РМС). Успешный заход на посадку и посадка самолета во многом зависит от глубоких знаний и грамотной эксплуатации бортового оборудования летным экипажем.
В данном пособии рассмотрены теоретические вопросы принципа действия наземного и бортового оборудования РМС посадки, системы VOR, нормы ICAO на основные тактико-технические характеристики, органы управления и индикации и порядок включения и предполетной проверки аппаратуры КУРС МП-70.
Принцип работы канала курса (стандарт ILS, 1, 2 и 3 категорий)
Принцип действия
Диаграмма направленности антенной системы КРМ состоит из 2-х, пересекающихся вдоль продольной оси ВПП, лепестков.
Высококочастотное излучение этих лепестков представляет собой АМ колебание, но частоты огибающих разные: 90 Гц- в одном лепестке и 150 Гц – в другом. Поэтому лепестки называются соответственно "90 Гц" и "150 Гц ". Направление максимума лепестков соответствует максимальному значению коэффициента глубины амплитудной модуляции– m. Информативным параметром, в зависимости от положения точки приема, является разность глубин амплитудной модуляции (РГМ) между сигналами этих лепестков Для углового отклонения самолета №3, указанного на рис.3.1,
m "150Гц" >m "90Гц".
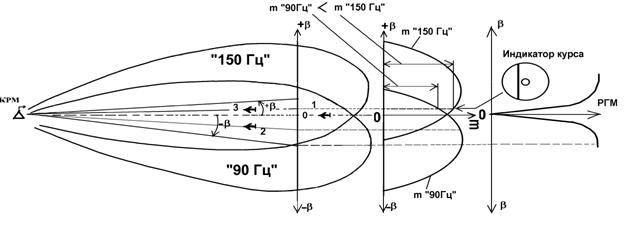
Рис.3.1 К принципу работы канала курса
Соответственно, в бортовом приемнике данная разность РГМ преобразуется в разность амплитуд низкочастотных сигналов 90Гц и 150Гц, которая пропорциональна угловому отклонению самолета от линии курса.
|
|
Для точки приема на продольной оси ВПП РГМ = 0, соответственно амплитуды низкочастотных сигналов 90 Гц и 150Гц одинаковы, следовательно, разность их амплитуд равна нулю и стрелка курса будет в центре шкалы индикатора.
При отклонении самолета влево или вправо значение РГМ пропорционально угловому отклонению, что приводит в конечном счете к соответствующему отклонению стрелки курса.
Для опознавания КРМ выдает трехбуквенные позывные тональной частоты 1020±50 Гц со скоростью 7 слов/мин.
Контрольные вопросы
1. Для какой точки приема рис.3.1 (самолет 1, 2 или3) наибольшее значение РГМ?
Нарисуйте положение стрелки индикатора курса для трех положений самолета.
2. Для какой точки приема рис.3.1 (самолет 1, 2 или3) наименьшее значение РГМ?
3. Для точки приема в зоне действия КРМ m "90Гц" > m "150Гц". Нарисуйте
индикатор курса и укажите положение стрелки курса.
4. Почему зона радиотехнической линии курса называется равносигнальной?
Принцип действия
Диаграмма направленности антенной системы ГРМ (Рис.4.1) в вертикальной
плоскости состоит из 2-х, пересекающихся вдоль линии глиссады, лепестков. Высококочастотное излучение этих лепестков представляет собой АМ колебание.
Частоты огибающих следующие: в верхнем 90 Гц, а в нижнем лепестке 150 Гц
Информативным параметром, в зависимости от положения точки приема,
является разность глубин амплитудной модуляции (РГМ) между сигналами
этих лепестков. В бортовом оборудовании данная разность РГМ преобразуется
в разность амплитуд низкочастотных сигналов 90 Гц и 150 Гц, которая
пропорциональна угловому отклонению ВС от линии глиссады.
При отклонении самолета выше или ниже линии глиссады, РГМ пропорциональна угловому отклонению, что приводит, в конечном счете, к соответствующему отклонению стрелки глиссады.
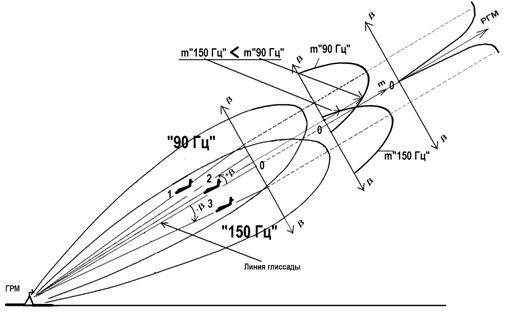
Рис.4.1 К принципу действия ГРМ
Так как ГРМ размещается в стороне от ВПП, то задаваемая маяком глиссада искривляется у поверхности ВПП. Как показано на рис.4.2 зона РГМ - это прямая линия, проходящая через точку установки маяка и составляющая с горизонтом угол β.
|
|
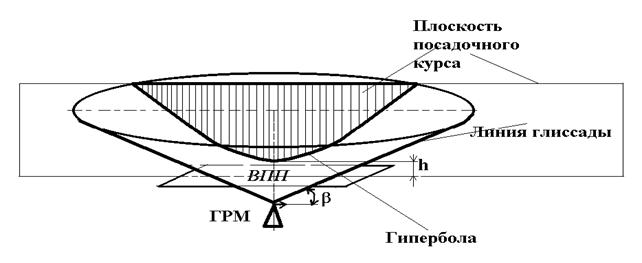
Рис.4.2 Образование криволинейной глиссады
Представим, что лепестки диаграммы направленности вращаются в горизонтальной плоскости. Тогда зона РГМ опишет поверхность в виде конуса с центром в точке размещения маяка. Глиссада, задаваемая совместно КРМ и ГРМ, есть линия пересечения плоскости посадочного курса, проходящей через ось ВПП с данной поверхностью зоны РГМ. Эта линия является гиперболой, проходящей на некоторой высоте h над земной поверхностью.
Причем,
h =L ·tg β, (4.1)
где L – удаление антенны ГРМ от оси ВПП.
Например, если принять β =2º40´ и L = 150 м, то h = 7 м. Этот пример показывает, что с помощью ГРМ невозможно осуществить снижение самолета до поверхности ВПП. Антенны ГРМ создают в вертикальной плоскости диаграмму направленности в виде пересекающихся лепестков, которые формируются с участием также и земной поверхности. Так как антенны ГРМ расположены на некоторой высоте, то в точку приема приходит прямая радиоволна и радиоволна, отраженная от земной поверхности. В итоге диаграмма направленности получается многолепестковой. В результате пересечения верхнего лепестка "90 Гц" основной зоны излучения и 2-го лепестка "150 Гц " формируется ложная линия глиссады (рис.4.3).
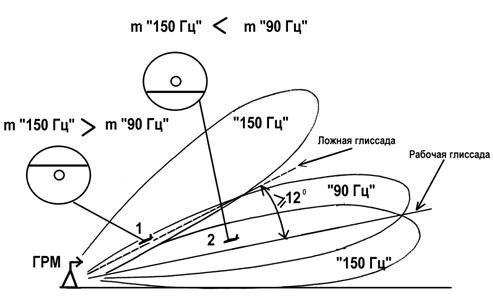
Рис.4.3 Образование ложной линии глиссады
При отклонении самолета относительно ложной линии глиссады, поведение стрелки глиссады индикатора будет противоположным поведению стрелки при полете самолета в зоне рабочей глиссады.
Угол наклона ложной глиссады должен быть не меньше 12º относительно рабочей глиссады, и только при сложном рельефе местности допускается ее положение под углом не менее 5º относительно рабочей глиссады.
Принцип работы МРМ
МРМ представляет собой передающее устройство, работающее на специальную антенну направленного действия. Антенна состоит из 2-х горизонтальных полуволновых вибратора и отражающей сетки, что позволяет сформировать направленную вверх диаграмму направленности в форме конуса (рис.7.1).
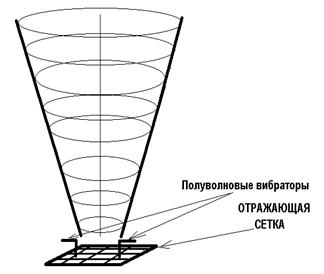
Рис.7.1 Диаграмма направленности МРМ
Структурная схема МРМ представлена на рис.7.2, а на рис.7.3 временная диаграмма сигнала, излучаемого МРМ.
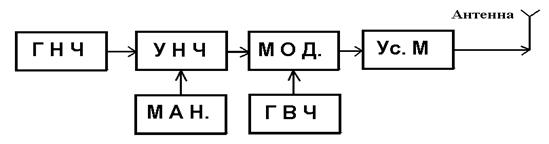
Рис.7.2 Структурная схема МРМ

Рис.7.3 Временная диаграмма (к принципу работы МРМ)
Высокочастотные колебания генератора высокой частоты ГВЧ поступают на модулятор МОД, где они модулируются по амплитуде усиленным напряжением от генератора низкой частоты ГНЧ (400 Гц, 1300 Гц или 3000Гц – в зависимости от размещения МРМ). С помощью манипулятора МАН. производится либо прерывание несущей частоты в усилителе мощности Ус. М. (в МРМ старого образца), либо прерывание сигнала низкой частоты в блоке УНЧ в соответствии с размещением МРМ (2 тире/с - ДМРМ; чередование 2 тире/с и 6 точек/с – СМРМ; 6 точек/с – БМРМ).
|
|
Нормы ICAO на основные тактико-технические данные (ТТД) наземного оборудования РМС посадки
Маркерный радиомаяк
а) рабочая частота -75 МГц.
б) зона действия (При полете самолета по стандартной глиссаде β =2º40´):
ДМРМ - 600±200 м; СМРМ – 300±100 м; БМРМ – 150±50 м.
в) частота модуляции:
ДМРМ – 400 Гц; СМРМ – 1300 Гц; БМРМ – 3000 Гц.
г) код манипуляции:
ДМРМ – 2 тире/с; СМРМ – чередование 2 тире/с и 6 точек/с; БМРМ –6 точек/с.
Контрольные вопросы
1.Что является причиной искривлений линий курса и глиссады?
2.Стрелка курса индикатора самолета, пролетающего начало ВПП, находится в
центре шкалы. Каково возможное отклонение самолета от продольной оси ВПП
для КРМ 2 категории?
3. На рис.8.1 самолет 3 находится на продолжении продольной оси ВПП.
Почему стрелка курса индикатора этого самолета отклонена от центра?
4.В пределах какой части шкалы индикатора (5 частей по 50 мкА), возможны
колебания стрелок курса и глиссады при полете от границы зоны действия
до ДМРМ? РМС ILS 2 категории.
5. В пределах какой части шкалы индикатора (5 частей по 50 мкА), возможны
колебания стрелок курса и глиссады при полете от СМРМ до опорной точки
ILS для РМС ILS 2 категории? Каким значениям тока соответствуют эти колебания?
6. Где находится опорная точка ILS и на какой высоте?
7. Как экипаж определяет, что самолет находится в зоне действия КРМ и ГРМ?
8. Индикатор И-250. Какому значению тока индикатора соответствует РГМ=0,01?
Укажите на индикаторе возможное положение стрелки курса.
9. Определите ширину сектора курса, если длина ВПП=1500 м, а удаление КРМ
от торца ВПП 600 м.
10. РГМ=0,06. Определите величину тока индикатора курса для КУРС МП-2 или
"ОСЬ-1".Укажите на индикаторе возможное положение стрелки курса.
Находится ли при этом самолет в пределах сектора курса?
11. РГМ=0,06. Определите величину тока индикатора глиссады для КУРС МП-70.
Укажите на индикаторе возможное положение стрелки глиссады. Находится ли
при этом самолет в пределах полусектора глиссады?
12.Почему сектор курса называют сектором точного наведения? Как по индикатору
курса определить, что самолет пересекает границу сектора курса?
13. Как по индикатору глиссады определить, что самолет пересекает границу
полусектора глиссады?
14. Ширина сектора курса 4°.Во сколько раз ширина зоны действия КРМ больше
ширины сектора курса?
15.Сравните ширину лепестков диаграмм направленности в КРМ 1 и ГРМ 1.
По какому критерию Вы будете сравнивать ширину лепестков?
16. Во сколько раз ширина зоны действия ГРМ больше ширины полусектора
глиссады для РМС 3-й категории?
17.Ширина сектора курса 6°.Самолет летит с постоянным угловым отклонением
относительно продольной оси ВПП 3°. Будет ли стрелка курса индикатора
колебаться? Ответ обосновать.
18. РГМ=0,093. Определите величину тока индикатора курса для "КУРС МП-2",
"ОСЬ-1", "КУРС МП-70". Укажите на индикаторе возможное положение стрелки
курса. Находится ли при этом самолет в пределах сектора курса?
19.Определите величину допустимого отклонения угла наклона глиссады для
β стандарт.=2°40′ (ILS 1, ILS 2, ILS 3).
20. Определите ширину верхней или нижней части полусектора глиссады для
β стандарт.=2°40′ (ILS 2).
21. Находится ли зона ложной глиссады в пределах зоны действия ГРМ?
Ответ обосновать.
22.Какую долю верхней или нижней части полусектора глиссады составляет
величина искривлений линии глиссады над ДМРМ? (Размещение ILS).
23.Скорость самолета 240 км/ч. Определите время пролета зоны ДМРМ при
снижении по стандартной глиссаде.
24. Скорость самолета 240 км/ч. Определите время пролета зоны БМРМ при
снижении по стандартной глиссаде.
25.Рассчитать величину линейного отклонения самолета от траектории
посадки и величину искривлений линий в соответствии с методикой
приведенной в приложении.
Система VOR
Принцип работы
Принцип действия основан на сравнении фаз сигналов частотой 30 Гц, принятых из поля излучения наземного маяка, причем фаза одного из сигналов привязана к направлению северного магнитного меридиана антенны радиомаяка, а фаза второго зависит от направления самолета на радиомаяк. Первый сигнал называется сигналом «постоянная фаза», а второй - сигналом «переменная фаза».
На рис.9.2 приведены временные диаграммы сигналов для азимута маяка 0º и 270º.
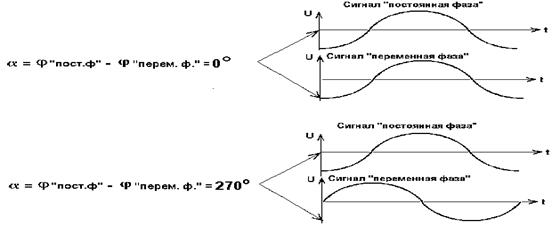
Рис.9.2 Сравнение фаз сигналов «постоянная «и «переменная фаза»
для азимута маяка 0º и 270º
В зависимости от принципа работы различают стандартный VOR и доплеровский VOR (DVOR).
Наземный радиомаяк стандартного VOR является передающим устройством, формирующего поле излучения с помощью двух антенн - направленного и ненаправленного действия (рис.9.3).

Рис.9.3 Диаграммы направленности антенн радиомаяка VOR
На рис.9.4 изображены временные диаграммы сигналов, поясняющих работу стандартного VOR.
Антенна ненаправленного действия радиомаяка VOR излучает высокочастотный сигнал (рис.9.4, диаграмма №4), промодулированный по амплитуде сигналом поднесущей частоты 10 кГц (точнее 9960Гц), который в свою очередь промодулирован по частоте сигналом 30 Гц (диаграммы №3 и №1). Этот сигнал (30 Гц) и является сигналом «постоянная фаза». Антенна направленного действия имеет слабовыраженную диаграмму направленности, имеющую форму окружности со смещенным центром, которая вращается с частотой 30Гц. Антенна излучает высокочастотные немодулированные колебания (модуляцию для опознавания не учитываем). Вращение диаграммы направленности приводит к амплитудной модуляции принимаемого на самолете сигнала с частотой огибающей равной частоте вращения диаграммы, т. е. 30 Гц, который и является сигналом «переменная фаза» (Диаграммы №5 и №6 для положений самолетов 1 и 2 рис.9.3 соответственно).Радиомаяк VOR регулируется таким образом, что фазы сигналов (30Гц) совпадают в направлении на магнитный север. В любом другом направлении фаза сигнала «переменная фаза» отстает от фазы сигнала «постоянная фаза» на угол между этим направлением и направлением на магнитный север. Следовательно, измерив величину такого отставания можно определить азимут.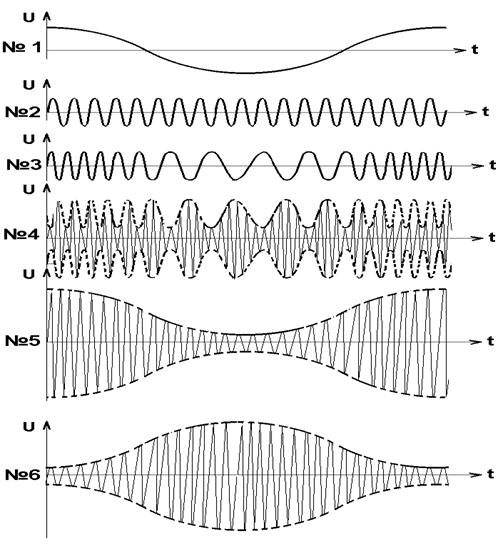
Рис.9.4 Временные диаграммы сигналов работы стандартного радиомаяка VOR
Погрешность такой системы около 5 градусов. Столь низкая точность обусловлена сильным влиянием сигналов, отраженных от местных объектов.Для увеличения точности стандартные VOR заменяют на более сложные радиомаяки (доплеровские), погрешность которых значительно меньше (около 0,5º).Контрольные вопросы
1. Чем по назначению сигнал «переменная фаза» отличается от сигнала «постоянная фаза»?2. Текущая фаза синусоидального сигнала различна для разных моментов времени (в пределах периода колебания). Почему же опорный сигнал 30Гц называют сигналом «постоянная фаза»?3. Азимут 90º. Нарисуйте временные диаграммы сигналов «постоянная» и «переменная фаза» для этого случая.4. Объясните, почему в точке приема ВЧ колебания, принимаемые от ненаправленной антенны промодулированы по амплитуде? Антенна же излучает немодулированные колебания.5.Азимут 270º. Нарисуйте временную диаграмму сигнала на входе приемника, содержащего сигнал «переменная фаза».6..Азимут 270º. Укажите временную диаграмму сигнала на входе приемника, содержащего сигнал «постоянная фаза».7.Азимут 180º. Укажите по рис. 9.4 № временной диаграммы сигнала на входе приемника от антенны направленного действия при вращении диаграммы против часовой стрелки.6.Если бы ненаправленная антенна излучала АМ ВЧ колебания с огибающей 30Гц, то этот сигнал (30Гц) считался бы сигналом «постоянная фаза» или «переменная фаза»? 7.Сравните погрешности стандартного и доплеровского VOR. 9.3 Принцип работы доплеровского радиомаяка (DVOR) 9.3.1 Принцип действия DVORПринцип действия доплеровских радиомаяков основан на использовании эффекта Допплера. Как известно, эффект Допплера проявляется при движении излучателя относительно точки приема или же при перемещении точки приема относительно излучателя. Например, при движении самолета (точка приема) в направлении излучателя (рис 9.5а), частота Допплера (Fд):
Fд =fпрм – fизл.=Vс/λ= Vr/λ, (9.1)
где fпрм – частота принимаемого сигнала;fизл. - частота излучателя;Vс – скорость самолета;λ – длина радиоволны;Vr - радиальная скорость.
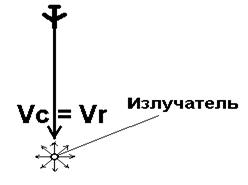
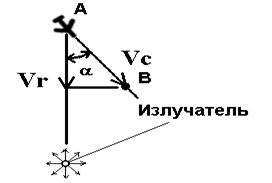 Рис.9.5 а) Полет самолета на излучатель Рис.9.5 б) Полет самолета в другом направлении При полете самолета в другом направлении (рис.9.5б) радиальная скорость меньше: Vr =Vc·cosα, (9.2)где α –угол между направлением на излучатель и направлением полета.Соответственно, частота Доплера: Fд =Vc·cosα / λ, (9.3) Рассмотрим случай вращения излучателя относительно точки вращения с радиусом R, точку приема примем неподвижной (рис.9.6).За начало отсчета примем положение излучателя в точке 1. Радиальная составляющая скорости Vr =Vизл.·sinφ=0, где φ - угол поворота излучателя.Для последующих положений излучателя в точках 2…12 радиальная составляющая скорости изменяется достигая максимального значения в точках 4 и 10 (φ=90º и φ=270º) и меняет свое направление (знак) при 180º < φ < 360º.Соответственно, частота принимаемого сигнала уменьшается при движении излучателя в пределах 0º < φ < 180º и увеличивается при 180º < φ < 360º.Максимальное изменение частоты при φ=90º и φ=270º. Изменение частоты принимаемого сигнала по отношению к частоте излучателя соответствует частоте Доплера, т.е. Fд(t) =Vr(t), (9.4) λ = Vизл.·sinφ / λ, (9.5) Для положения самолета (точки приема) на западе (азимут радиомаяка α =90º) начальная фаза зависимости радиальной составляющей скорости от времени (угла поворота излучателя) составляет 270º (рис.9.7).Значение частоты Допплера вследствие вращения излучателя по окружности: Fд(t)=2π ·Fвр.·R·sin(2π·Fвр.·t - α) / λ, (9.6) где R-радиус вращения излучателя, α-азимут, λ- длина волны высокочастотных колебаний.В бортовом приемнике можно выделить данный закон изменения частоты в виде напряжения или сигнала, изменяющегося с частотой 30 Гц. Фаза этого сигнала зависит от направления на самолет и потому данный сигнал называется сигналом «переменная фаза». На рис.9.6 начальная фаза сигнала «переменная фаза» составляет 180º, а на рис.9.7 составляет 270º. Начальная фаза сигнала «постоянная фаза» в обоих случаях составляет 0º. Результат сравнения фаз сигналов "переменная " и "постоянная фаза" является азимутом радиомаяка, т.е. 180º и 90º соответственно.
Рис.9.5 а) Полет самолета на излучатель Рис.9.5 б) Полет самолета в другом направлении При полете самолета в другом направлении (рис.9.5б) радиальная скорость меньше: Vr =Vc·cosα, (9.2)где α –угол между направлением на излучатель и направлением полета.Соответственно, частота Доплера: Fд =Vc·cosα / λ, (9.3) Рассмотрим случай вращения излучателя относительно точки вращения с радиусом R, точку приема примем неподвижной (рис.9.6).За начало отсчета примем положение излучателя в точке 1. Радиальная составляющая скорости Vr =Vизл.·sinφ=0, где φ - угол поворота излучателя.Для последующих положений излучателя в точках 2…12 радиальная составляющая скорости изменяется достигая максимального значения в точках 4 и 10 (φ=90º и φ=270º) и меняет свое направление (знак) при 180º < φ < 360º.Соответственно, частота принимаемого сигнала уменьшается при движении излучателя в пределах 0º < φ < 180º и увеличивается при 180º < φ < 360º.Максимальное изменение частоты при φ=90º и φ=270º. Изменение частоты принимаемого сигнала по отношению к частоте излучателя соответствует частоте Доплера, т.е. Fд(t) =Vr(t), (9.4) λ = Vизл.·sinφ / λ, (9.5) Для положения самолета (точки приема) на западе (азимут радиомаяка α =90º) начальная фаза зависимости радиальной составляющей скорости от времени (угла поворота излучателя) составляет 270º (рис.9.7).Значение частоты Допплера вследствие вращения излучателя по окружности: Fд(t)=2π ·Fвр.·R·sin(2π·Fвр.·t - α) / λ, (9.6) где R-радиус вращения излучателя, α-азимут, λ- длина волны высокочастотных колебаний.В бортовом приемнике можно выделить данный закон изменения частоты в виде напряжения или сигнала, изменяющегося с частотой 30 Гц. Фаза этого сигнала зависит от направления на самолет и потому данный сигнал называется сигналом «переменная фаза». На рис.9.6 начальная фаза сигнала «переменная фаза» составляет 180º, а на рис.9.7 составляет 270º. Начальная фаза сигнала «постоянная фаза» в обоих случаях составляет 0º. Результат сравнения фаз сигналов "переменная " и "постоянная фаза" является азимутом радиомаяка, т.е. 180º и 90º соответственно. 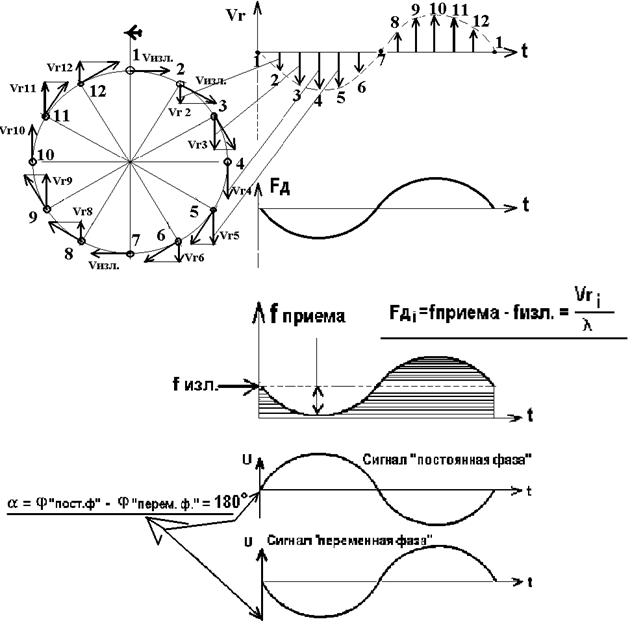 Рис.9.6 Вращение излучателя по окружности (азимут 180º)
Рис.9.6 Вращение излучателя по окружности (азимут 180º) 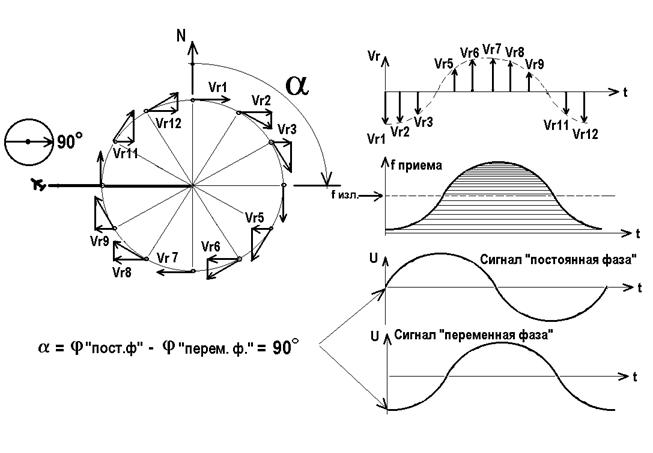 Рис.9.7 Вращение излучателя по окружности (азимут 90º) 9.3.2 Принцип работы DVOR Временные диаграммы сигналов, поясняющих работу DVOR, приведены на рис.9.8 (азимут на радиомаяк 180º).Антенная система DVOR состоит из 2-х антенн. Антенна №1 состоит из 50 вибраторов, расположенных по окружности диаметром 13,5м. На каждый вибратор за счет электронной коммутации, поочередно по часовой стрелке, со скоростью 30 оборотов в секунду, поступает высокочастотное колебание. Тем самым осуществляется как бы вращение излучателя относительно центра вращения со скоростью 30 оборотов в секунду. Это высокочастотное колебание промодулировано по амплитуде напряжением поднесущей частоты 10 кГц (диаграмма №3). Для точки приема частота высокочастотных колебаний (диаграмма №4), в силу эффекта Допплера, изменяется с периодичностью Т=1/Fвр., где Fвр.- скорость вращения излучателя. fпрм.=fизл.+Fдопл.=fизл.+2π ·Fвр.·R·sin(2π·Fвр.·t- α)/λ, (9.7) где R-радиус вращения излучателя, α-азимут,λ- длина волны высокочастотных колебаний. Изменение частоты высокочастотных колебаний приводит к соответственному изменению частоты напряжения поднесущей 10 кГц. Таким образом, производится частотная модуляция колебаний поднесущей частоты 10 кГц с периодичностью Т=1/Fвр. В бортовом приемнике можно выделить данный закон изменения частоты в виде напряжения или сигнала, изменяющегося с частотой 30 Гц. Фаза этого сигнала зависит от направления на самолет и потому данный сигнал называется сигналом «переменная фаза». Сигнал «постоянная фаза» 30 Гц излучается ненаправленной антенной №2 методом амплитудной модуляции высокочастотных колебаний (диаграмма №5). Радиомаяк DVOR регулируется таким образом, что фазы сигналов (30Гц) совпадают в направлении на магнитный север. В любом другом направлении фаза сигнала «переменная фаза» отстает от фазы сигнала «постоянная фаза» на угол между этим направлением и направлением на магнитный север. Следовательно, измерив величину такого отставания можно определить азимут. Доработка бортового бортового оборудования для работы с радиомаяком DVOR не требуется. При таком способе работы радиомаяка влияние сигналов, отраженных от местных предметов значительно уменьшается, так как информационный параметр заложен в фазу не огибающей амплитудно-модулированного колебания (стандартный VOR), а в фазу сигнала модулирующего сигнал 10 кГц по частоте.
Рис.9.7 Вращение излучателя по окружности (азимут 90º) 9.3.2 Принцип работы DVOR Временные диаграммы сигналов, поясняющих работу DVOR, приведены на рис.9.8 (азимут на радиомаяк 180º).Антенная система DVOR состоит из 2-х антенн. Антенна №1 состоит из 50 вибраторов, расположенных по окружности диаметром 13,5м. На каждый вибратор за счет электронной коммутации, поочередно по часовой стрелке, со скоростью 30 оборотов в секунду, поступает высокочастотное колебание. Тем самым осуществляется как бы вращение излучателя относительно центра вращения со скоростью 30 оборотов в секунду. Это высокочастотное колебание промодулировано по амплитуде напряжением поднесущей частоты 10 кГц (диаграмма №3). Для точки приема частота высокочастотных колебаний (диаграмма №4), в силу эффекта Допплера, изменяется с периодичностью Т=1/Fвр., где Fвр.- скорость вращения излучателя. fпрм.=fизл.+Fдопл.=fизл.+2π ·Fвр.·R·sin(2π·Fвр.·t- α)/λ, (9.7) где R-радиус вращения излучателя, α-азимут,λ- длина волны высокочастотных колебаний. Изменение частоты высокочастотных колебаний приводит к соответственному изменению частоты напряжения поднесущей 10 кГц. Таким образом, производится частотная модуляция колебаний поднесущей частоты 10 кГц с периодичностью Т=1/Fвр. В бортовом приемнике можно выделить данный закон изменения частоты в виде напряжения или сигнала, изменяющегося с частотой 30 Гц. Фаза этого сигнала зависит от направления на самолет и потому данный сигнал называется сигналом «переменная фаза». Сигнал «постоянная фаза» 30 Гц излучается ненаправленной антенной №2 методом амплитудной модуляции высокочастотных колебаний (диаграмма №5). Радиомаяк DVOR регулируется таким образом, что фазы сигналов (30Гц) совпадают в направлении на магнитный север. В любом другом направлении фаза сигнала «переменная фаза» отстает от фазы сигнала «постоянная фаза» на угол между этим направлением и направлением на магнитный север. Следовательно, измерив величину такого отставания можно определить азимут. Доработка бортового бортового оборудования для работы с радиомаяком DVOR не требуется. При таком способе работы радиомаяка влияние сигналов, отраженных от местных предметов значительно уменьшается, так как информационный параметр заложен в фазу не огибающей амплитудно-модулированного колебания (стандартный VOR), а в фазу сигнала модулирующего сигнал 10 кГц по частоте. 
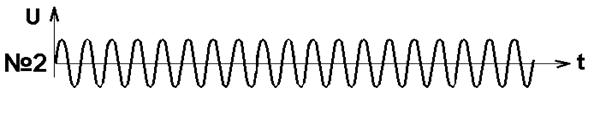


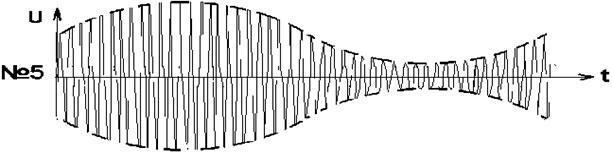 Рис.9.8 Временные диаграммы сигналов работы доплеровского радиомаяка VOR
Рис.9.8 Временные диаграммы сигналов работы доплеровского радиомаяка VOR Контрольные вопросы
1. Определите значение Fд для Vc=720 км/час и fпередатчика =110 МГц. Полет осуществляется на передатчик.
2.Определите значение Fд для Vc=720 км/час и fпередатчика =110 МГц. Угол между направлением на передатчик и направлением полета составляет 60º. Какая частота будет больше: приемника или передатчика?
3.Нарисуйте графическую зависимость частоты Доплера от времени для α =0º.
4.В каком из сигналов рис.9.8 имеется составляющая - сигнал "постоянная фаза"?
5.В каком из сигналов рис.9.8 имеется составляющая - сигнал "переменная фаза"?
6.Нарисуйте временные диаграммы сигналов "переменная" и "постоянная фаза" для α=270º.
7.Нарисуйте временную диаграмму сигнала "переменная фаза" для α =180º при вращении излучателя против часовой стрелки и укажите измеренное значение азимута.
8.Изменится ли измеренное значение азимута рис.9.8, если фазу сигнала "постоянная фаза" изменить на 180º?
9.С какой целью в DVOR вводится сигнал поднесущей частоты 10 кГц?
10.Почему во временной диаграмме сигнала №4 рис.9.8 колебания высокой частоты имеют переменный характер: более растянуты в первой половине периода вращения и сжаты – во второй?
11.Почему в системе DVOR влияние сигналов, отраженных от местных предметов меньше, чем в стандартном VOR?
9.4 Принцип работы бортового оборудования Структурная схема бортового оборудования системы VOR приведена на рис. 9.9. На нагрузке амплитудного детектора АД выделяется сложный сигнал, содержащий сигналы 10 кГц и 30 Гц. С помощью фильтров Ф»30Гц» и Ф»10 кГц» производится разделение этих сигналов по двум каналам: сигнал частотой 30Гц поступает на канал «переменной фазы», а 10 кГц- на канал «постоянной фазы». Примечание. Наименование каналов "переменная фаза" и "постоянная фаза" соответствует работе со стандартным VOR. При работе с DVOR через канал "постоянная фаза" проходит сигнал "переменная фаза". В канале «постоянной фазы» производится ограничение амплитуды, устраняющей паразитное влияние переизлучателей в УС. - ОГР., и затем частотное детектирование в ЧД. На нагрузке ЧД выделяется напряжение сигнала «постоянная фаза» частотой 30 Гц. После усиления в УНЧ сигналы «постоянная фаза «и «переменная фаза» поступают на канал измерения азимута и канал селектора курса.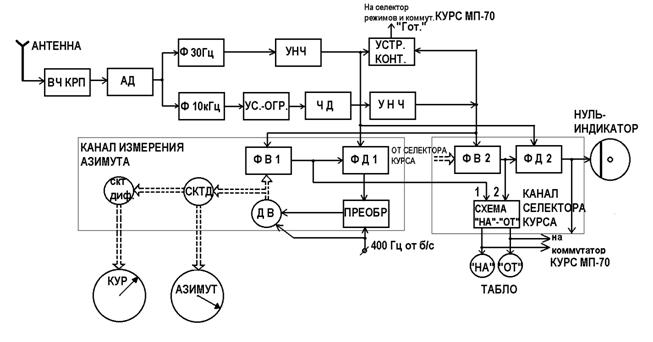 Рис.9.9 Структурная схема бортового оборудования системы VORВ канале измерения азимута сигнал «постоянная фаза» поступает на фазовращатель ФВ 1 и с его выхода затем на фазовый детектор ФД 1. На другой вход ФД 1 подается сигнал «переменная фаза» 30 Гц. На выходе ФД 1 образуется постоянный ток, величина и направление которого зависит от фазового сдвига между этими сигналами. Выходное напряжение постоянного тока с фазового детектора ФД 1 поступает на преобразователь ПРЕОБР., в котором оно преобразуется в сигнал частотой 400 Гц, амплитуда которого пропорциональна выходному напряжению ФД 1, а фаза принимает два значения – 0 или 180º (относительно бортсети 400 Гц) в зависимости от полярности выходного напряжения ФД 1. Сигнал 400 Гц поступает на обмотку двигателя, ротор которого через редуктор связан с ротором фазовращателя ФВ 1. Двигатель будет вращать ротор ФВ 1 до тех пор, пока выходное напряжение фазового дедектора ФД 1 не станет равным нулю, при этом разность фаз сравниваемых сигналов будет равна нулю. На одном валу фазовращателя ФВ 1 установлены синусно-косинусные трансформаторы СКТ-датчик и СКТ-дифференциал. Через СКТ – датчик поворот ротора ФВ 1 передается на указатель азимута, а через СКТ - дифференциал- на указатель, для индикации курсового угла радиомаяка.
Рис.9.9 Структурная схема бортового оборудования системы VORВ канале измерения азимута сигнал «постоянная фаза» поступает на фазовращатель ФВ 1 и с его выхода затем на фазовый детектор ФД 1. На другой вход ФД 1 подается сигнал «переменная фаза» 30 Гц. На выходе ФД 1 образуется постоянный ток, величина и направление которого зависит от фазового сдвига между этими сигналами. Выходное напряжение постоянного тока с фазового детектора ФД 1 поступает на преобразователь ПРЕОБР., в котором оно преобразуется в сигнал частотой 400 Гц, амплитуда которого пропорциональна выходному напряжению ФД 1, а фаза принимает два значения – 0 или 180º (относительно бортсети 400 Гц) в зависимости от полярности выходного напряжения ФД 1. Сигнал 400 Гц поступает на обмотку двигателя, ротор которого через редуктор связан с ротором фазовращателя ФВ 1. Двигатель будет вращать ротор ФВ 1 до тех пор, пока выходное напряжение фазового дедектора ФД 1 не станет равным нулю, при этом разность фаз сравниваемых сигналов будет равна нулю. На одном валу фазовращателя ФВ 1 установлены синусно-косинусные трансформаторы СКТ-датчик и СКТ-дифференциал. Через СКТ – датчик поворот ротора ФВ 1 передается на указатель азимута, а через СКТ - дифференциал- на указатель, для индикации курсового угла радиомаяка. Для решения задачи самолетовождения по заданному азимуту применяется канал селектора курса. В этом канале сравнение фаз сигналов «переменная фаза «и «постоянная фаза» осуществляется в фазовом детекторе ФД 2. Но фаза сигнала «постоянная фаза» зависит от угла поворота ротора фазовращателя ФВ 2, угол которого определяется значением азимута линии заданного пути, выставляемого пилотом на блоке селектора курса. На выходе ФД 2 образуется постоянный ток, величина и направление которого зависит от фазового сдвига между этими сигналами. Выходное напряжение постоянного тока с фазового детектора ФД 2 поступает на отклонение стрелки курса нуль-индикатора (КППМ, ПНП и др.). Стрелка указывает положение ЛЗП относительно самолета.
Кроме того, для индикации направления полета «НА» - «ОТ» (на радиомаяк или от радиомаяка) с выхода фазовращателей ФВ 1 и ФВ 2 сигналы подаются на схему СХЕМА «НА» - «ОТ». Если разность между фазами сигналов находится в пределах 0-180º, напряжение с выхода данной схемы поступает на табло «НА», в противном случае - на табло «ОТ». При пролете самолетом радиомаяка фаза сигнала «переменная фаза «изменяется на 180º. При этом ротор ФВ 1 разворачивается на 180º. На входе схемы «НА»- «ОТ» разность между фазами сигналов будет в пределах 180º- 360º и загорится табло «ОТ». Если самолет сделал разворот на 180º и летит в направлении на данный радиомаяк, то для правильной индикации отклонения самолета относительно ЛЗП следует изменить выставленный азимут на блоке селектора курса на 180º.
На выходе устройства контроля УСТР. КОНТ. формируется сигнал готовности "Гот." при условии достаточного уровня сигналов "постоянная" и "переменная фаза". Этот сигнал поступает на селектор режимов КУРС МП-70 на загорание лампы "К1" или "К2" и на коммутатор, с выхода которого подается сигнал на закрытие бленкера курса КППМ.
Контрольные вопросы
1. Азимут радиомаяка 0º.Нарисуйте сигналы "постоянной" и "переменной фазы" и измеренное значение азимута при работе со стандартным VOR и при работе с DVOR. На выходе каких устройств структурной схемы (рис. 9.9) выделяются данные сигналы?
2. Какой из сигналов: "постоянная фаза" или "переменная фаза" поступают на вход фазовращателя ФВ2 при работе со стандартным VOR?
3. Какой из сигналов: "постоянная фаза" или "переменная фаза" поступают на вход фазовращателя ФВ2 при работе с DVOR?
4. По рис.9.4 и рис.9.8 укажите № временных диаграмм сигналов:
а) на входе приемника;
б) на выходе УНЧ канала "переменная фаза";
в) на выходе частотного детектора ЧД.
5. В каком устройстве канала измерения фазы происходит сравнение фаз сигналов "постоянная" и "переменная фаза"?
6. Фаза какого сигнала ("постоянная" или "переменная фаза") меняется с помощью фазовращателя ФВ1? (Стандартный VOR).
7. Фазу какого сигнала ("постоянная" или "переменная фаза") изменяет пилот с блока селектора курса? (Стандартный VOR).
8. Назначение преобразователя ПРЕОБР.?
9. На вход схемы СХЕМА "НА"-"ОТ" поступает два сигнала (1 и 2). Фаза какого из этих сигналов изменяется на 180º при пролете радиомаяка VOR?
10. Азимут радиомаяка 40º.На блоке селектора курса установлено 140º. Какая лампа будет гореть "НА" или "ОТ"?
АППАРАТУРА КУРС МП-70
Назначение и комплектация
Самолетная аппаратура КУРС МП-70 предназначена для работы в комплексе с радиомаяками системы РМС посадки и радиомаяками VOR.
Самолетная аппаратура КУРС МП-70 позволяет решать на самолете следующие задачи:
1.Определять угловое отклонение самолета в горизонтальной плоскости относительно оси ВПП.
2. Определять угловое отклонение самолета в вертикальной плоскости относительно номинальной глиссады.
3. Выдавать звуковую и световую сигнализацию момента пролета маркерных радиомаяков.
4. Определять азимут самолета на радиомаяк VOR или курсовой угол радиомаяка.
5. Определять угловое отклонение самолета относительно линии заданного пути.
Аппаратура "Курс МП-70" состоит из двух полукомплектов, каждый из которых может работать самостоятельно. Общими для полукомплектов являются две антенны (курсовая и глиссадная), селектор режимов, маркерный радиоприёмник с антенной, выпрямитель, блок встроенного контроля. В состав каждого полукомплекта входят: устройство навигационно-посадочное (УНП №1 и УНП №2), пульт управления, селектор курса и командно-пилотажный прибор.Устройство навигационно-посадочное состоит из курсового и глиссадного приёмников, низкочастотного блока и блока посадки.Включение каждого полукомплекта осуществляется тумблером на пульте управления полукомплектом.ОСНОВНЫЕ Т.Т.Д. “КУРС МП - 70”
Таблица 11.1
| Наименование параметра | КУРС МП-70 |
| А. В режиме VOR 1. Диапазон частот, МГц 2. Число частотных каналов 3. Погрешность установки азимута по селектору курса, в град не более 4. Погрешность индикации азимута по автоматическому каналу (каналу следящей системы), в град не более 5. Ток отклонения при разности между азимутом и установленным на селекторе курса 100, мкА | 108 - 117,95 ±1 1,5 150 ± 10% |
| Б. В режиме ILS по курсовому каналу 1. Диапазон частот, МГц 2. Число частотных каналов 3. Допустимое среднеквадратическое отклонение выходного тока КРП при положении ВС на линии курса, мкА не более 4. Ток отклонения при РГМ=0,093, мкА | 108,1 - 111,9 ± 4 90 ± 10 % |
| В. В режиме ILS по глиссадному каналу 1. Диапазон частот, МГц 2. Число частотных каналов 3. Допустимое среднеквадратическое отклонение выходного тока ГРП при положении ВС на линии глиссады, мкА, не более 4. Ток отклонения составляет при РГМ = 0,092, мкА | 329,15 - 335 ± 6 79 ± 10 % |
Продолжение табл.11.1
| Г. В режиме СП-50 1. Ток отклонения составляет при уровне модуляции сигнала переменной фазы 17,5% (по курсовому каналу), мкА Остальные параметры курсового канала и все параметры глиссадного тракта, кроме рабочих частот, аналогичны параметрам аппаратуры в режиме ILS | 150 ± 10 % |
| Д. По маркерному каналу 1. Чувствительность приемника в режиме “Маршрут”, мВ, не хуже 2. Чувствительность приемника в режиме “Посадка”, мВ, не хуже 3. Модулирующие частоты, Гц | 0,2 1 ± 40 % 400, 1300, 3000 |
| Потребляемая мощность, не более - по сети 27 В, в Вт - по сети 36 В, 400 Гц, в ВА - по сети 115 В, 400 Гц, в ВА |
Примечание.
1. При выпавших бленкерах «К» и «Г» на КППМ и негорящих светосигнализаторах К1(К2) и Г1 (Г2) на селекторе режимов пользоваться аппаратурой запрещается.
2. При полете в режиме VOR на частотах 117,95МГЦ необход
|
|
|

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!