

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Последними частями алгоритма последовательного поиска является применение интеграции и возведения в квадрат двух результатов перемножений с косинусоидальными и синусоидальными сигналами, соответственно. Возведение в квадрат введено для получения мощности сигнала. Интеграция это просто суммирование все 38.192 точек, соответствующих длине обработанных данных. Возведение в квадрат, таким образом, применяется по результатам суммирования. Окончательным шагом является добавление двух величин слагаемых I и Q. Если местный генерированный код хорошо настроен (выровнен) с кодом входящего сигнала, и частота местной генерированный несущей частоты соответствует частоте входящего сигнала, то выход будет существенно выше, чем если какой-либо из этих критериев не соблюден. Рисунок 6.3 показывает выход от метода получения с последовательным поиском. Рисунок 6.3.а это выход, когда осуществляется получения со спутника, который не является видимым, а Рисунок 6.3.b это, когда осуществляется получение по спутнику, который является видимым. PRN 19 это спутник, произвольно выбранный в качестве невидимого.
6.3 Получение с параллельным поиском в частотном интервале
Метод получения с последовательным поиском показывает, что последовательный поиск двух параметров, а именно частоты и временного сдвига кода, по всем возможным величинам, это процедура, которая является очень затратной по времени. Если бы было возможно исключить из процедуры поиска какой-либо из этих двух параметров, или если бы было возможно применять эту процедуру в параллельном режиме, то производительности данной процедуры существенно была бы увеличена.
 Получение с параллельным поиском в частотном интервале 79
Получение с параллельным поиском в частотном интервале 79
|
|
 Рисунок 6.3. Выход с получения последовательным поиском, (а) PRN 19 не видим, поэтому пик не представлен. (b) PRN 21 является видимым спутником, поэтому на рисунке представлен значительный пик. Пик наблюдается при временном сдвиге кода С/А = 359 элементарных посылок данных и частоте = 9.5475 МГц.
Рисунок 6.3. Выход с получения последовательным поиском, (а) PRN 19 не видим, поэтому пик не представлен. (b) PRN 21 является видимым спутником, поэтому на рисунке представлен значительный пик. Пик наблюдается при временном сдвиге кода С/А = 359 элементарных посылок данных и частоте = 9.5475 МГц.
Название Получение с параллельным поиском в частотном интервале подразумевает, что данный второй метод получения распараллеливает поиск по одному из параметров. Данный метод использует преобразование Фурье для осуществления преобразования из временного интервала в частотный интервал. Рисунок 6.4. представляет собой блок- схему алгоритма получения с параллельным поиском в частотном интервале.
Входящий сигнал умножается на последовательность местного генерированного кода PRN, причем выбирается конкретная величина кода соответствующая одному из временных сдвигов кода конкретного спутника в интервале от 0 до 1022 элементарных посылок данных. Результирующий сигнал преобразуется в частотный интервал с использованием преобразования Фурье. Преобразование Фурье может применяться как Дискретное преобразование Фурье (DFT) или как быстрое преобразование Фурье (FFT). FFT является наиболее быстрым из этих двух методов, но оно требует входной последовательности длины корня из двух, и, таким образом, 2n, где n является положительной целой величиной.
Рисунок 6.5 иллюстрирует результат перемножения входящего сигнала и тщательно настроенного (совмещенного) сигнала местной генерированной последовательности PRN. Данный результат является сигналом незатухающей гармонической волны. Конечно, это происходит только тогда, когда местный генерированный код PRN тщательно настроен (совмещен) с кодом входящего сигнала. Если входящий сигнал содержит компоненты сигнала от других спутников, то данные компоненты будут минимизированы в результате свойств взаимной корреляции последовательностей кодов PRN.
|
|
При использовании метода получения с параллельным поиском в частотном интервале, верхний сигнал на Рисунке 6.5 это входной сигнал для функции преобразования Фурье. При тщательном совмещении (настройке) с PRN кодом, выход с преобразования Фурье покажет выраженный пик по величине амплитуды.
 |
РИСУНОК 6.4. Блок-схема алгоритма получения с параллельным поиском в частотном интервале.
80 6. Получение
 |
РИСУНОК 6.5. Демодуляция кода PRN. В верхней части код PRN модулирован на несущую волну. В центральной части рисунка показан тщательно настроенная (совмещенная) последовательность PRN. Внизу рисунка мы восстановили незатухающую гармоническую волну после перемножения входящего сигнала и тщательно настроенной последовательности PRN.
Пик буден расположен на частотном индексе, соответствующем частоте незатухающей гармонической волны сигнала и, таким образом, на частоте несущей волны сигнала.
Точность определения частоты зависит от длины DFT/ Длина соответствует числу сэмплов в анализируемых данных. Если 1 миллисекунда (ms) данных анализируется, то число сэмплов может быть найдено как 1 / 1000 частоты сэмплирования. Таким образом, если частота сэмплирования составляет fs = 10 МГц, то число сэмплов составляет N = 10.000.
При длине преобразования Фурье – DFT равной 10.000, первые N /2 сэмплы представляют частоты от 0 до fs / 2 Гц.
Таким образом, частотное разрешение выхода равно:
D f =
fs /2 = fs

 N /2 N
N /2 N
(6.2)
При частоте сэмплирования fs = 10 МГц, результирующее частотное разрешение равно:
 D f = 10 MHz = 1 kHz 10, 000
D f = 10 MHz = 1 kHz 10, 000
(6.3)
В этом случае, точность определения несущей частоты равна 1 кГц, что сравнимо с точностью, равной 500 Гц при последовательном алгоритме получения.
Рисунок 6.6 показывает выход как два графика спектральной плотности мощности (PSD). Алгоритм PSD использует быстрое преобразование Фурье FFT для осуществления получения. Рисунок 6.6а это выход преобразования Фурье при тщательно настроенном (совмещенном) временном сдвиге кода. Это можно заметить из пика на графике. Рисунок 6.6b показывает график PSD для ненастроенного временного сдвига кода. Заметьте отсутствие пика на графике.
В то время как метод получения с последовательным поиском пошагово проходит через все возможные значения временных сдвигов кода, метод получения с параллельным поиском в частотном интервале ищет получение, только проходя через 1023 различных временных сдвигов кода. В зависимости от конкретной реализации преобразования частотного интервала, должно быть возможно получить более быстрое использование данного метода по сравнению с последовательным методом получения.
|
|

 Получение с параллельным поиском временного сдвига кода 81
Получение с параллельным поиском временного сдвига кода 81
 РИСУНОК 6.6. График PSD для входящего сигнала умноженного на последовательность местного генерированного кода PRN. (а) При перемножении с тщательно настроенным (совмещенным) кодом PRN, выход будет демонстрировать пик на несущей частоте. (b) при перемножении с ненастроенным кодом, выход не покажет каких-либо пиков. Частота ПЧ (IF) равна 9.548 МГц. Частота Допплера одинаковая для ПЧ (IF) и ВЧ (RF), это так же относится к разности между ПЧ (IF) и частотой пика.
РИСУНОК 6.6. График PSD для входящего сигнала умноженного на последовательность местного генерированного кода PRN. (а) При перемножении с тщательно настроенным (совмещенным) кодом PRN, выход будет демонстрировать пик на несущей частоте. (b) при перемножении с ненастроенным кодом, выход не покажет каких-либо пиков. Частота ПЧ (IF) равна 9.548 МГц. Частота Допплера одинаковая для ПЧ (IF) и ВЧ (RF), это так же относится к разности между ПЧ (IF) и частотой пика.
Как и реализация метода получения с последовательным поиском, реализация метода получения с параллельным поиском в частотном интервале является прямолинейной. Алгоритм может быть реализован напрямую, основываясь на блок-схеме метода, показанной на Рисунке 6.4.
Первая часть данного метода идентична первой части метода последовательного поиска. А именно, местный генерированный код PRN долен быть перемножен со входящим сигналом. После перемножения кода, сигнал преобразуется в частотный интервал посредством преобразования Фурье. Эффективным инструментом для этого является быстрое преобразование Фурье - FFT. См. Оппенхайм и Шафер (Oppenheim & Schafer) (1999 год), чтобы ознакомиться с подробностями метода FFT.
После преобразования сигнала в частотный интервал посредством алгоритма FFT, он становится комплексным сигналом. Если местный генерированный сод является хорошо настроенным (согласованным) с кодом входящего сигнала, то выход с FFT имеет пик на ПЧ (IF) плюс Допплеровский сдвиг частоты. Чтобы найти возможную частоту пика, абсолютная величина всех компонентов должна быть рассчитана. Рисунок 6.7 показывает выход от метода получения с параллельным поиском в частотном интервале.
6.4 Получение с параллельным поиском временного сдвига кода
|
|
Как видно из Уравнения (6.1), количество шагов поиска по измерению временного сдвига кода существенно больше, чем число шагов по частоте (1023 по сравнению с 41). Предыдущий метод распараллеливает поиск в частотном диапазоне, исключая необходимость поиска посредством 41 возможной частоты. Если получение может быть распараллелено по измерению временного сдвига кода, то только 41 шаг должен быть предпринят, по сравнению с 1023 шагами в алгоритме получения с параллельным поиском в частотном интервале.
Последний указанный метод в получении GPS сигнала использует ранее упоминавшееся преимущество параллельного поиска временного сдвига кода. Данный метод просто основан на получении методом параллельного поиска временного сдвига кода. В последующем мы рассмотри теорию, на которой основан данный метод.

 82 6. Получение
82 6. Получение
 РИСУНОК 6.7. Выход с получения параллельным поиском в частотном диапазоне. Рисунок включает только первые 500 смещений (сдвигов) элементарных посылок данных и частотный диапазон от 5 до 15 МГц. (а) PRN 19 это невидимый спутник, поэтому никакого значимого пика не представлено в спектре. (b) PRN 21 является видимым спутником, поэтому существенный пик представлен в спектре. Пик расположен при временном сдвиге кода на 359 элементарных посылок данных и частоте 9.548 МГц.
РИСУНОК 6.7. Выход с получения параллельным поиском в частотном диапазоне. Рисунок включает только первые 500 смещений (сдвигов) элементарных посылок данных и частотный диапазон от 5 до 15 МГц. (а) PRN 19 это невидимый спутник, поэтому никакого значимого пика не представлено в спектре. (b) PRN 21 является видимым спутником, поэтому существенный пик представлен в спектре. Пик расположен при временном сдвиге кода на 359 элементарных посылок данных и частоте 9.548 МГц.
Целью получения является осуществление корреляции со входящим сигналом и кодом PRN/ Вместо умножения входного сигнала на коды PRN с 1023 различными временными сдвигами кода, как это делалось в методе получения с последовательным поиском, более удобным представляется осуществить круговую перекрестную корреляцию между входным сигналом и кодом PRN без смещения временного сдвига кода. В последующем, метод осуществления круговой корреляции посредством преобразования Фурье будет рассмотрен; См. Оппенхайм и Шафер (Oppenheim & Schafer) (1999 год), страница 746 и Цуй (Tsui) (2000 год), страница 140.
Дискретные преобразования Фурье последовательностей с конечнозначными длинами x(n) и y(n), когда они обе имеют длину N рассчитываются следующим образом:
|
X (k) = x (n) e - j 2 pkn / N и
n =0
N -1
|
n =0
(6.4)
Последовательности круговой перекрестной корреляции между двумя последовательностями конечнозначных длин x(n)
и y(n) и периодически повторяющихся рассчитывается следующим образом:
1 N -1 1 N -1

 z (n) = N å x (m) y (m + n) = N å x (- m) y (m - n)
z (n) = N å x (m) y (m + n) = N å x (- m) y (m - n)
(6.5)
m =0
m =0
В последующем мы опускаем масштабный коэффициент 1/ N.
Дискретное N-точечное преобразование Фурье функции z(n) может быть выражено следующим образом:
|
Z (k) = x (- m) y (m - n) e - j 2 pkn / N
n =0 m =0
(6.6)
N -1 N -1
= å x (m) e j 2 pkm / N å y (m + n) e - j 2 pk (m + n)/ N = X *(k) Y (k)
|
|
m =0 n =0
Где X*(k) является комплексным сопрягаемым X(k)
Получение с параллельным поиском временного сдвига кода 83
 |
РИСУНОК 6.8. Блок-схема алгоритма получения с параллельным поиском временного сдвига кода.
Когда представление частотного интервала перекрестной корреляции найдено, представление временного интервала может быть найдено из инверсного преобразования Фурье.
Рисунок 6.8. является блок-схемой алгоритма получения с параллельным поиском временного сдвига кода. Входящий сигнал умножается на местный генерированный сигнал несущей частоты. Умножение с сигналом генерирует сигнал I, и умножение на версию сигнала со сдвигом фазы на 90º генерирует сигнал Q. Сигналы I и Q объединяются в комплексный входной сигнал x(n) = I(n) + jQ(n) в функции преобразования Фурье DFT.
Генерированный код PRN преобразуется в частотный интервал и результат является комплексно сопряженным.
Преобразование Фурье входного сигнала умножается на преобразование Фурье кода PRN. Результат данного умножения преобразуется во временной интервал посредством инверсного преобразования Фурье. Абсолютная величина выхода инверсного преобразования Фурье представляет собой корреляцию, индекс данного пика отмечает временной сдвиг кода PRN входного сигнала.
По сравнению с предыдущими методами получения, метод получения с параллельным поиском временного сдвига кода отсекает диапазон поиска по 41 различной несущей частоте. Преобразование Фурье генерированного кода PRN должно быть осуществлено только один раз для каждого получения. Для каждой из 41 частот мы осуществляем одно преобразование Фурье и одно инверсное преобразование Фурье, и таким образом эффективность расчета данного метода зависит от применения, реализации данных функций. Точность параметров, определенных данным методом получения в части, касающейся частоты, такова же, как в методе последовательного поиска. Временной сдвиг кода PRN, однако, более точен, по сравнению с прочими методами, так как он дает величину корреляции для каждого сдвига сэмплированного кода. Таким образом, если частота сэмплирования равняется 10 МГц, то сэмплированный код PRN содержит 10.000 сэмплов, поэтому точность временного сдвига кода может иметь 10.000 различных значений, вместо 1023 значений.
Таким же образом, как и прочих методах получения, реализация данного метода прямолинейна, поскольку он может быть реализован напрямую, основываясь на блок-схеме на Рисунке 6.8.
 84 6. Получение
84 6. Получение
 РИСУНОК 6.9. Выход с получения с параллельным поиском временного сдвига кода. (а) PRN 19 не видим. Поэтому нет выраженного пика. (b) PRN 21 видим. поэтому значительный пик представлен на рисунке. Пик находится на временном сдвиге кода 13404 сэмпла и на частоте 9.5475 МГц.
РИСУНОК 6.9. Выход с получения с параллельным поиском временного сдвига кода. (а) PRN 19 не видим. Поэтому нет выраженного пика. (b) PRN 21 видим. поэтому значительный пик представлен на рисунке. Пик находится на временном сдвиге кода 13404 сэмпла и на частоте 9.5475 МГц.
Как видно из Рисунка 6.9, данный метод фактически не использует новых блоков, по сравнению с двумя предыдущими методами. В результате этого, многие элементы могут использоваться повторно для его реализации. Единственное различие в данном методе состоит в том, что только один код PRN должен генерироваться для каждого получения. Таким образом, нет необходимости брать в расчет 1023 различных временных сдвигов кода.
Первым шагом является умножение входящего сигнала на местные генерированные косинусоидальные или синусоидальные волны, соответственно, принимая I и Q компоненты сигнала. Эти две величины комбинируются вместе как комплексный вход на преобразование Фурье. Результат преобразования Фурье умножается на результат нижней ветви блок- схемы на Рисунке 6.8. Этот сигнал создается следующим образом.
Генератор PRN генерирует код без временного сдвига кода. Как и в реализации прочих алгоритмов, генерирование кода осуществляется заранее (отдельно). Следующий шаг осуществляет преобразование Фурье кода PRN и результатом является комплексное сопряжение.
Результат вышеупомянутого умножения принимается как вход на инверсное преобразование Фурье, реализованное на встроенной функции IFFT программного обеспечение MATLAB. Эта функция имеет свойства, сходные с функцией FFT в части времени исполнения.
Как упоминалось в реализации метода получения с параллельным поиском в диапазоне частот выше, выход с преобразования FFT является комплексным. Тоже самое происходит и для IFFT, поэтому выход нуждается в такой же обработке, как и в том случае. Таким образом, абсолютная величина рассчитывается для всех компонентов. Рисунок 6.9 показывает выход с метода получения с параллельным поиском временного сдвига кода.
Размер данных
Выбор формата (размера) данных используемых для метода получения может быть основан на различных критериях. Первым вопросом, который следует рассматривать, это эффект от передачи бита навигационных данных. Ни один из описанных алгоритмов не может игнорировать данные передачи (переходы) данных, если они происходят во время периода получения. Поэтому, для того, чтобы гарантировать оптимальную производительность алгоритмов получения, должно быть обеспечено условие, что передачи данных не происходят в последовательности анализированных данных.
Время исполнения 85
ТАБЛИЦА 6.1. Время исполнения для каждого из трех реализованных алгоритмов получения.
| Алгоритм | Время исполнения | Повторы | Сложность |
| Последовательный поиск | 41.943 | Низкая | |
| Параллельный поиск в диапазоне частот | Средняя | ||
| Параллельный поиск временного сдвига кода | Высокая |
Как уже ранее упоминалось, навигационные данные передаются со скоростью 50 бит в секунду (bps). Это выражается в возможной передаче данных каждые 20 миллисекунд. Если, например, 10 миллисекунд (ms) данных используются для алгоритма получения, они могут включать передачу бита. Фактически, существует 50% вероятности того, что они не включают передачу бита. (Не точно 50%, поскольку два последовательных бита данных могут иметь идентичные величины.) Однако, если получение осуществляется в двух последовательно расположенных последовательностях, каждая длиной 10 миллисекунд (ms), то как минимум одна из последовательностей не будет включать передачу данных.
Второй вопрос, который следует рассмотреть при выборе формата (размера) данных, используемых для получения, это вероятность осуществления успешного получения. Этот вопрос может обсуждаться исходя из идеи, что вероятность детектирования правильных, то есть корректных, параметров для конкретного спутника возрастает вместе с объемом анализируемых данных.
Третий вопрос состоит в расчетных требованиях, как функции от длины данных, которые должны анализироваться. Это, фактически, дополнение к предыдущему вопросу, так как расчеты становятся медленнее, когда последовательность становится длиннее.
Выбор размера данных, используемых для получения, должен основываться на компромиссе всех трех только что описанных вопросов. Если вопрос о передаче данных должен рассматриваться, то может быть необходимо запустить алгоритм получения дважды для каждого получения. Для того, чтобы обеспечить хорошую вероятность успешного получения, длина данных не должна быть слишком короткой. Однако, она не может быть и слишком длинной, поскольку это приведет к тому, что вычисления будут очень тяжелыми и емкими по времени.
Компромисс, который будет использоваться, предусматривает длину данных в 1 миллисекунду (ms) для алгоритмов получения. Одна миллисекунда соответствует в точности длине одного полного кода С/А, таким образом, это также упрощает алгоритм, исключая необходимость дублирование кода. Длина данных вряд ли может быть короче, потому что это приведет к возникновению корреляций с неполным кодом. Она может быть длиннее, но, как уже говорилось, это приведет к снижению производительности расчетов алгоритма. Для того, чтобы обеспечить возможность захвата трансляции спутников, даже учитывая то, что передача бита данных происходит в анализируемой последовательности данных, алгоритм может быть запущен во второй раз, если первое получение не было успешным.
Время исполнения
Как указывалось в теории, лежащей в основе методов получения, теоретическая производительность, в части расчетных требований, различна по данным трем методам. Поэтому, время исполнения для каждого из этих трех реализованных методов будет
86 6. Получение
ТАБЛИЦА 6.2. Результаты получения для PRN 21 с тремя различными алгоритмами получения; см. захваты на Рисунках
6.3., 6.7. и 6.9.
| Алгоритм поиска | Частота [МГц] | Временной сдвиг кода |
| Последовательный поиск | 9.5475 | 359 элементарных посылок данных |
| Параллельный поиск в диапазоне частот | 9.548 | 359 элементарных посылок данных |
| Параллельный поиск временного сдвига кода | 9.5475 | 13.404 сэмпла |
измерено для использования в качестве параметра для выбора правильного алгоритма в приемнике. Время исполнения измеряется с использованием функций tic и toc в аппарате программного обеспечения MATLAB. Средний персональный компьютер (Pentium 4, 2.8 ГГц) использовался для измерения времени, все измерения времени были произведены 10 раз, и средняя величина для них была подсчитана. Поэтому абсолютная величина времен исполнения является лишь приблизительной, так как никакое из исполнений не было оптимизировано для запуска в режиме реального времени. Относительные измерения, однако, должны показать, который из методов будет иметь наибольший потенциал для реализации в режиме реального времени.
Результаты измерения времен исполнения можно увидеть в Таблице 6.1. Таблица также включает количество повторов или комбинаций, которые алгоритм должен был исполнить и сложность вычислений каждого из этих повторов.
Заметьте, что все относительные измерения были основаны на производительности программного обеспечения MATLAB. Реализация на других языках программирования / в других средах программирования может критически изменить производительность.
Оценка параметров
Другой параметр, который может использоваться для выбора между данными тремя алгоритмами, это производительность в части точности результата. Результаты от получения со спутника 25 с использованием алгоритмов получения показаны в Таблице 6.2.
Из таблицы 6.2 становится очевидным, что все алгоритмы находят правильно частоту сигнала. Алгоритм параллельного поиска в диапазоне частот, однако, определяет частоту равной 9.548 МГц по сравнению с частотой 9.5475 МГц, определенной двумя другими алгоритмами.
Отслеживание кода и несущей
Мотивация
Синхронизация обеспечивает только грубые оценки фазовых параметров частоты и кода. Основная задача синхронизации состоит в уточнении этих параметров, удержании следа и демодуляции навигационных данных, приходящих с определенного спутника (и оценка псевдодальности). Базовая схема демодуляции показана на Рис. 7.1.
Данный рисунок показывает схему, используемую для демодуляции входного сигнала и получения навигационного сообщения. Сначала входной сигнал умножается на реплику несущей. Это делается для устранения несущей из сигнала. На следующем шаге сигнал умножается на реплику кода, и результат этого умножения представляет собой навигационное сообщение. Таким образом, для того чтобы идеально произвести отслеживание и демодуляцию сигнала одного спутника, синхронизационный модуль должен генерировать две реплики, одну для несущей и вторую для кода. Далее проведено детальное описание схемы демодуляции.
Демодуляция
 Пусть fL1 и fL2 будут несущими частотами L1 и L2 для сигнала прошедшего от спутника k с энергиями Pc, PPL1 и PPL2 для C/A или P кодирования. Последовательность кода гражданского доступа – Ck(t) и, последовательность P(Y) кода – Pk(t). Назовем последовательность навигационных данных Dk(t), тогда полный сигнал определяется выражением:
Пусть fL1 и fL2 будут несущими частотами L1 и L2 для сигнала прошедшего от спутника k с энергиями Pc, PPL1 и PPL2 для C/A или P кодирования. Последовательность кода гражданского доступа – Ck(t) и, последовательность P(Y) кода – Pk(t). Назовем последовательность навигационных данных Dk(t), тогда полный сигнал определяется выражением:

|
Pk (t) Dk (t) sin(2 p f t)
|
+ 
|
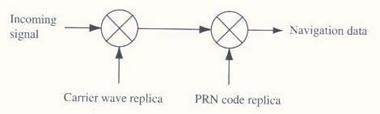 |
Надписи на рисунке:
| Incoming data | Входные данные |
| Carrier wave replica | Реплика несущей волны |
| PRN code replica | Реплика кода псевдослучайного шума (ПСШ) |
| Navigation data | Навигационные данные |
Рисунок 7.1. Базовая схема демодуляции. Эта схема используется для демодуляции навигационных сообщений.
 Выходные данные с внешнего интерфейса, включая фильтрацию и понижающее преобразование, могут быть описаны как:
Выходные данные с внешнего интерфейса, включая фильтрацию и понижающее преобразование, могут быть описаны как:
sk (t) =
Ck (t) Dk (t) cos(w
t) +
Pk (t) Dk (t) sin(w t)
(7.2)
|
|
Затем цифро-аналоговый преобразователь делает выборку этого сигнала. Из-за узости полосы частот фильтра вокруг кода гражданского доступа, код P искажается. Таким образом, последнее слагаемое в Уравнении (7.2) отфильтровывается и не может быть демодулировано и в дальнейшем описывается, как шум e(n). После ЦА конверсии сигнал со спутника k может быть описан следующим образом:
|
(7.3)
где n выражается в единицах 1/fs s; n указывает на то, что сигнал дискретен во времени.
Для того, чтобы получить навигационные данные Dk(n) из представленного выше сигнала, необходимо провести над ним понижающее преобразование в полосу немодулированной передачи. Устранение несущей осуществляется умножением входного сигнала на реплику несущей, как показано на Рис. 7.1. Если реплика несущей идентична входной несущей по частоте и фазе, то произведение сигнала и реплики будет иметь вид:
|

 =- 1 Ck (n) Dk (n) - 1 cos(2 w
=- 1 Ck (n) Dk (n) - 1 cos(2 w
2 2 IF
n) Ck (n) Dk (n)
(7.4)
где первое слагаемое представляет собой навигационное сообщение, умноженное на PRN код, а второе слагаемое – несущую с удвоенной промежуточной частотой. Последняя часть сигнала может быть удалена применением фильтра низких частот. После такой фильтрации сигнал перейдет в форму:
1 Ck (n) Dk (n) 2
(7.5)
Следующий шаг состоит в удалении кода Ck(n) из сигнала. Это осуществляется путем коррелирования сигнала и кодовой реплики. Если кодовая реплика в точности соответствует коду сигнала, то выходные данные после коррелирования примут вид:
N -1
å Ck (n) Ck (n) Dk (n) = NDk (n)
n =0
(7.6)
где N Dk(n) – навигационное сообщение, умноженное на количество точек в сигнале
N.
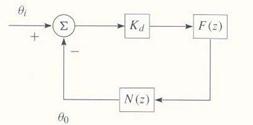 |
Рисунок 7.2 Линеаризованная цифровая модель ФАПЧ второго порядка.
Описанный выше процесс демодуляции применим только к сигналам с одного спутника. Это сделано для упрощения уравнений и простоты изложения идеи демодуляционной схемы. В реальном сигнале присутствуют вклады от всех видимых спутников, которые дают больший шумовой член в уравнения; смотри Хайкин (Haykin) (2000), стр. 95.
В демодуляционной схеме, представленной на Рис. 7.1, используются две реплики. Для создания точной реплики требуется некоторая обратная связь. Цикл обратной связи для создания реплики несущей рассматривается как следящая за несущей система, а цикл обратной связи для создания реплики кода рассматривается
как следящая за кодом система.
ФАПЧ второго порядка
И следящая за несущей система (схема Костаса), и следящая за кодом система (система автоматической подстройки по задержке (САПЗ)) имеют аналитические модели фазовой автоподстройки частоты, которые могут быть использованы для предсказания их производительности. Эти линейные модели были предложены Зимером и Петерсеном (Ziemer & Peterson) в 1985 году и являются мощным инструментом для предсказания производительности следящих систем. Другой блестящий эталон, т.к. речь идет о моделях Костаса и САПЗ, для линейных систем фазовой автоподстройки частоты и их параметров и производительности предложен Бестом (Best) в 2003 году.
Расширение линейной ФАПЧ модели было сделано Чунгом (Chung) и соавторами в 1993 году. За этим подходом последовала реализация циклов Костаса и САПЗ, тем не менее, линейные модели все еще могут выступать в качестве основы для оценки производительности и анализа.
Системы ФАПЧ второго порядка содержат фильтр первого порядка и генератор, управляемый напряжением, (ГУН). Отметим, что передаточная функция фильтра аналогового цикла и ГУН есть:
F (s) = 1 t 2 s +1

(7.7)
s t 1
 N (s) = K 0
N (s) = K 0
s
(7.8)
где F(s) и N(s) – передаточные функции фильтра и ГЧП, соответственно. K0 – усиление ГЧП. Передаточная функция линеаризованной аналоговой ФАПЧ имеет вид [см. Чунг (Chung) и соавторы, 1993]
 |
Надписи на рисунке:
| Incoming signal | Входящий сигнал |
Рисунок 7.3. Фильтр ФАПЧ второго порядка.
H (s) =
Kd F (s) N (s)

1+ KdF (s) N (s)
(7.9)
где Kd – усиление фазового дискриминатора. Подставляя Уравнения (7.7) и (7.8) в передаточную функцию (7.9) получим:
2 zw s + w 2
H (s) = n n
|
(7.10)
где собственная частота ωn=(K0*Kd/τ1)^(1/2), и коэффициент затухания ξ=τ2*ωn/2. Передаточная функция, представленная выше, есть аналоговая версия и для того,
чтобы конвертировать передаточную функцию в цифровую форму, используется билинейное преобразование выражения (7.10). Оно дает следующее выражение для цифровой передаточной функции модели ФАПЧ:
(4 zw T + (w T)2) + 2(w T)2 z -1 + ((w T)2 - 4 zw T) z -2
H 1(z) =
n n n n n

|
(7.11)
Линеаризованная цифровая модель ФАПЧ второго порядка показана на Рис. 7.2, где Kd есть усиление дискриминатора, F(z) – передаточная функция фильтра, и N(z) – передаточная функция ГЧП. Передаточная функция цифрового фильтра и ГЧП есть:
(C + C) - C z -1
F (z) = 1 2 1
1- z -1
Kz -1 N (z) = 0
1- z -1
(7.12)
(7.13)
где F(z) – передаточная функция фильтра, и N(z) – передаточная функция ГЧП. Рисунок 7.3 показывает фильтр ФАПЧ F(z).
Цель состоит в нахождении коэффициентов C1 и C2 в цикле ФАПЧ второго порядка. Это осуществляется сравнением передаточной функции цифрового цикла ФАПЧ и передаточной функции аналогового цикла ФАПЧ. Передаточная функция для цифровой версии может быть записана как
H (z) = q 0 (z) =

Kd F (z) N (z)

(7.14)
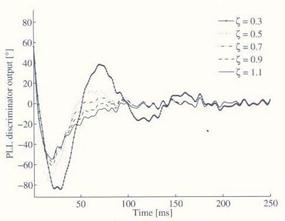 |
Надписи на рисунке:
| PPL discriminator output [0] | Выход дискриминатора цикла ФАПЧ |
| Time [ms] | Время [мс] |
Рисунок 7.4. Фазовая ошибка как функция различного коэффициента затухания Ksi.
Большее время установления сигнала приводит к меньшему проскоку фазы.
Подставляя (7.12) и (7.13) в (7.14) мы получим следующее выражение:
K K (C + C) z -1 - K K C z -2
H (z)= 0 d 1 2 0 d 1
(7.15)
2 1+ (K K (C + C) - 2) z -1 + (1- K K C) z -2
0 d 1 2 0 d 1
Для того чтобы найти выражение для коэффициентов С1 и С2, необходимо сравнить
(7.11) и (7.15). Это дает следующие два уравнения:
C = 1
8 zwnT
(7.16)
 1 K K 4 + 4 zw T + (w T)2
1 K K 4 + 4 zw T + (w T)2
0 d n n
1 4(w T)2
C = n
(7.17)
 |
где K0Kd – усиление цикла, ζ – коэффициент затухания, ωn – собственная частота и
T – время выборки; см. Чунг (Chung) и соавторы, 1993.
Собственная частота может быть найдена по формуле:
wn =
8 z BL

4 z 2 +1
(7.18)
где BL – ширина полосы шума в цикле; см. Паркинсон и Спайкер Мл. (Parkinson & Spiker) (1996), том 1, стр. 371.
Коэффициент затухания и ширина полосы шума для частных случаев сигнала. Но иногда инженер предпочитает изменить эти значения для специфических приложений и реализаций. Поэтому этим параметрам дано наиболее исчерпывающее объяснение.
 |
| Frequency offset [Hz] | Смещение частоты [Гц] |
| Time [ms] | Время [мс] |
Рисунок 7.5. Смещения частоты от приобретенного смещения частоты 30 Гц и для ширины полосы ФАПЧ шума 10, 30 и 60 Гц. Существуют отрицательные пики в первые 2 мс из‐за существования переходной стадии в фильтре цикла.
Коэффициент затухания
Коэффициент затухания определяет насколько быстро фильтр приходит к своей установочной точке. Коэффициент затухания также определяет сколько проскоков может иметь фильтр. Это можно увидеть из Рис.7.4.
Выбор коэффициента затухания с
|
|
|

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!