Рассмотрим информационное обеспечение комплекса навигационных устройств, моделирующего динамику ЛА и его движение относительно ориентиров. На рис. 4 представлена функциональная схема взаимодействия ЛА с навигационными устройствами.
Вся совокупность устройств разделяется на три последовательно соединенные группы, осуществляющие измерение ускорений I, скоростей II и координат III. Связь между группами устройств осуществляется через интеграторы сигналов во времени, а взаимодействие в каждой группе производится с помощью фильтров, которые обрабатывают однородную информацию, фильтруют погрешности и обеспечивают высокую точность измерений навигационных параметров. Динамика ЛА описывается системой уравнений (3)…(6), а кинематика относительного движения – уравнениями (7)…(10).
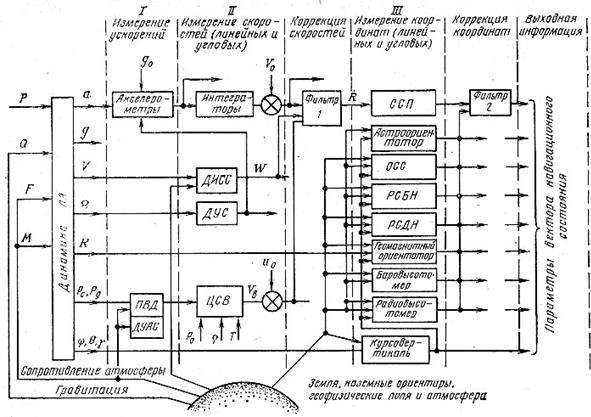
Рис. 4. Функциональная схема взаимодействия ЛА с навигационными устройствами
В первой группе устройств, состоящей из блока акселерометров с ортогональными осями чувствительности, измеряются составляющие вектора  ускорения ЛА, вызванного действием активных сил
ускорения ЛА, вызванного действием активных сил  . Гравитационное ускорение
. Гравитационное ускорение  , с которым движется ЛА под действием сил тяготения Земли и других небесных тел, не может быть измерено какими-либо приборами. Приемник воздушного давления (ПВД), а также датчик углов атаки и скольжения (ДУАС) воспринимают динамическое давление и направление потока воздуха, набегающего на ЛА (тем самым косвенно измеряется вектор силы
, с которым движется ЛА под действием сил тяготения Земли и других небесных тел, не может быть измерено какими-либо приборами. Приемник воздушного давления (ПВД), а также датчик углов атаки и скольжения (ДУАС) воспринимают динамическое давление и направление потока воздуха, набегающего на ЛА (тем самым косвенно измеряется вектор силы  ). Возможно также измерение силы тяги двигателей
). Возможно также измерение силы тяги двигателей  , если это необходимо для управления полетом.
, если это необходимо для управления полетом.
Вторая группа измерителей включает в себя:
· инерционный измеритель скорости, основанный на интегрировании составляющих вектора ускорений ( – измеряется, гравитационное ускорение  – задается априори) с учетом начального значения скорости
– задается априори) с учетом начального значения скорости  ;
;
· доплеровский измеритель путевой скорости и угла сноса (вектор  ) (ДИСС), который воспринимает движение ЛА относительно поверхности Земли;
) (ДИСС), который воспринимает движение ЛА относительно поверхности Земли;
· централь скорости – высоты (ЦСВ), использующая сигналы ПВД и ДУАС о статическом и динамическом давлении атмосферы  , и
, и  , а также дополнительную информацию о параметрах воздушной среды (статическое давление у поверхности Земли
, а также дополнительную информацию о параметрах воздушной среды (статическое давление у поверхности Земли  , плотность
, плотность  , температуру
, температуру  ), дает на выходе истинную воздушную скорость
), дает на выходе истинную воздушную скорость  . Для навигации используется геометрическая сумма векторов
. Для навигации используется геометрическая сумма векторов  , где
, где  – вектор скорости ветра (задается априори);
– вектор скорости ветра (задается априори);
· датчик составляющих вектора угловой скорости ЛА (ДУС), вызванной действием на ЛА вращающего момента М. Информация от ДУС используется для инерциальной системы и для управления угловым движением ЛА.
В фильтре 1 производится взаимная коррекция погрешностей измерителей скорости и статистическая фильтрация флуктуирующих помех. На выходе фильтра получаются компоненты вектора  скорости ЛА относительно навигационной системы отсчета, измеренные с максимальной точностью.
скорости ЛА относительно навигационной системы отсчета, измеренные с максимальной точностью.
В третьей группе подобраны измерители координат местонахождения ЛА относительно навигационной системы отсчета и ориентиров, основанные на различных методах навигации.
Основным измерителем линейных координат ЛА, действующим непрерывно, является система счисления пути (ССП), основанная на интегрировании во времени составляющих скорости полета. Кроме этого используется астрономический ориентатор, обзорно-сравнительная система (ОСС), радионавигационные системы ближнего (РСБН) и дальнего (РСДН) действия, геомагнитный ориентатор и высотомеры. Все эти измерители воспринимают изменение положения радиуса вектора ЛА относительно земной поверхности, земных и небесных ориентиров, полей земной атмосферы и геомагнитного поля. Курсовертикаль определяет угловые координаты ЛА (курс  , углы тангажа
, углы тангажа  и крена
и крена  ), а ее выходные сигналы используются для ориентации измерителей линейных координат ЛА.
), а ее выходные сигналы используются для ориентации измерителей линейных координат ЛА.
Фильтр 2 осуществляет совместную обработку выходных сигналов измерителей линейных координат ЛА, обеспечивая высокую точность и надежность измерений. При этом учитывается дискретный характер работы многих измерителей координат, а также воздействие на них естественных и искусственных помех.
Выходная информация навигационного комплекса включает в себя кроме 15 параметров динамики ЛА различные виды скоростей (истинную воздушную, приборную, скорость ветра, путевую); угол сноса; параметры относительного движения ориентиров, окружающей среды и условий полета; сигналы радиомаяков, приводных станций и систем слепой посадки и т. п.
В составе навигационного оборудования (см. рис. 4) можно выделить навигационное ядро, которое непрерывно моделирует динамику ЛА, начиная от ускорений и завершая измерением координат местонахождения. В состав навигационного ядра входят инерциальная система навигации, курсовертикаль, датчики угловых скоростей и, в некоторой части, система воздушного счисления пути (ПВД, ДУАС, ЦСВ и интеграторы счисления пути). Благодаря непрерывному функционированию навигационного ядра создаются благоприятные возможности для функционирования всех других навигационных устройств: облегчаются поиск, обнаружение и опознавание ориентиров, обеспечивается режим памяти при временном прекращении измерений, компенсируются систематические погрешности и т.п. Для этого инерциальная и воздушная системы счисления пути осуществляют управление (предварительное наведение) пеленгаторами позиционных измерителей координат в направлении на ориентиры. В свою очередь, измерители координат после захвата ориентира (цели) устраняют погрешности счисления пути и тем самым повышают точность измерений параметров вектора навигационного состояния.
Однако инерциальная система навигации (ИНС), являющаяся основой навигационного ядра комплекса, обладает существенной информационной недостаточностью. Если на выходе ИНС получают девять координат вектора навигационного состояния (по три составляющих векторов  ,
,  , ), то исходная информация от акселерометров содержит неполный вектор ускорения (измеряется вектор ускорения от активных сил и не измеряется вектор от сил тяготения). Кроме того, при интегрировании сигналов по времени необходимо задавать начальные значения векторов скорости
, ), то исходная информация от акселерометров содержит неполный вектор ускорения (измеряется вектор ускорения от активных сил и не измеряется вектор от сил тяготения). Кроме того, при интегрировании сигналов по времени необходимо задавать начальные значения векторов скорости  , и местонахождения
, и местонахождения  , а также начальную угловую ориентацию системы координат, моделируемой с помощью датчиков угловой скорости (ДУС). Вследствие информационной недостаточности ИНС обладает динамической неустойчивостью и накапливает погрешности в измерении скорости и координат местонахождения. Именно этими недостатками объясняется необходимость коррекции ИНС с помощью различных датчиков скорости и координат.
, а также начальную угловую ориентацию системы координат, моделируемой с помощью датчиков угловой скорости (ДУС). Вследствие информационной недостаточности ИНС обладает динамической неустойчивостью и накапливает погрешности в измерении скорости и координат местонахождения. Именно этими недостатками объясняется необходимость коррекции ИНС с помощью различных датчиков скорости и координат.






