

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Топ:
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
С развитием авиации, ростом числа и сложности задач, выполняемых ЛА, существенно повысились требования к информационному обеспечению полета. Это привело к качественному изменению приборного оборудования ЛА.
Эксплуатационные характеристики современного ЛА определяются не только техническим уровнем его планера и двигательной установки, но и в большой степени совершенством бортового оборудования самолета, его приборного комплекса. Это оборудование должно обеспечивать высокоточную четырехмерную навигацию, посадку ЛА в сложных метеоусловиях, всесторонний контроль, диагностику и локализацию отказов бортовой аппаратуры, информационную разгрузку экипажа.
Под термином комплекс оборудования понимается объединение блоков и приборов во взаимосвязанные группы (комплексы), предназначенные для решения определенных полетных задач. Цель комплексирования – это рациональный способ обеспечения экипажа максимумом информации при минимуме аппаратуры и приборов. Эта информация должна позволять экипажу находить оптимальное решение навигационной задачи при минимальной затрате времени. Несмотря на такое четкое определение, между отдельными комплексами самолетного оборудования сохранился ряд отличий.
По назначению и роду работы оборудование большинства современных самолетов может быть подразделено на несколько, достаточно четко разграниченных комплексов (рис. 1).
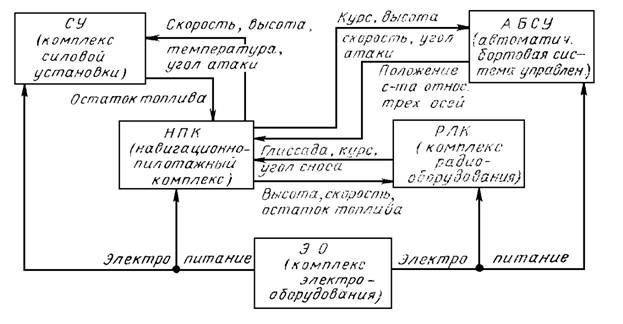
Рис. 1. Направления основных связей между комплексами оборудования
современного пассажирского самолета
1. Навигационно-пилотажный комплекс (НПК). В задачу этого комплекса входит обеспечение экипажа информацией о текущих координатах самолета, направлении, скорости и высоте его полета, а также выдача сигналов для автоматического управления движением самолета по заданной траектории. В состав НПК включаются следующие группы оборудования: центральные аналоговые (ЦАВМ) или цифровые (ЦЦВМ) вычислительные машины, гироинерциальные датчики местоположения самолета (ГИС), курсовертикали (КС и ЦГВ), вычислители аэродинамических параметров (ЦСВ), астрономические корректоры (АК, АО, РАС), директорно-пилотажные приборы (АДП), автоштурманы или плановые индикаторы навигационной обстановки (АШ, ПИНО), аппаратура индикации на стекле (ИНС) и др.
|
|
2. Радио- и радиолокационный комплекс (РЛК). В задачу РЛК входит обеспечение экипажа, а также других комплексов самолетной аппаратуры навигационной и предпосадочной информацией, получаемой от бортовых (автономных) радиосредств или от наземных радиостанций. Этот комплекс объединяет все оборудование, работающее на принципе излучения или приема электромагнитной энергии: радиостанции командной (КС) и дальней (ДС) связи, радиокомпасы (АРК), радиовысотомеры (РВ), приемники ближней навигации (VOR и DME), приемники для выполнения слепой посадки (КРП, ГРП, МРП), приемники дальней навигации (ЛОРАН), доплеровские счислители пройденного пути и углов сноса (ДИСС), метеорадиолокаторы или визиры (РЛВ), радиолокационные прицелы (РЛП), ответчики службы воздушного движения (СОМ) и многие другие.
3. Комплекс аппаратуры автоматической бортовой системы управления (АБСУ). Назначение АБСУ – обеспечение автоматического и полуавтоматического управления самолетом на всех режимах полета, вплоть до заходов на посадку в сложных метеорологических условиях. В комплекс АБСУ вошли разрозненные до этого приборы и механизмы: автопилоты (АП), автоматы углов атаки и перегрузки (АУАСП), ограничители скольжения (ОС), механизмы изменения передаточных чисел, демпферы, гидроусилители, автоматы триммирования, автоматы предельных режимов и т. д. В некоторые типы АБСУ входит аппаратура директорного пилотирования (АДП), т. е. сами директорные приборы и их вычислители.
|
|
4. Комплекс электрооборудования (КЭО). Основная задача этого комплекса – обеспечение всех потребителей электроэнергией нужного вида. В КЭО входят: генераторы переменного и постоянного тока, аккумуляторы, приводы постоянных оборотов, преобразователи одного вида тока в другой, регуляторы напряжения и частоты, аппараты защиты сети и потребителей, магистральные и распределительные сети и т. д.
5. Комплекс оборудования силовых (двигательных) установок (СУ). Задача этого комплекса – автоматизация управления многочисленными подвижными элементами воздухозаборников и двигателей, системами автоматического расхода топлива и пожаротушения, управления вспомогательной силовой установкой. В комплекс входят приборы, контролирующие работу двигателей.
6. Комплекс экспериментального контрольно-регистрирующего оборудования (КЭКО). Он предназначен для летных испытаний самого самолета и всех комплексов его оборудования, а также для расследования летных происшествий.
По признакам взаимодействия комплексы могут быть подразделены на три группы. К первой группе относятся наиболее автаркичные комплексы, например такие, как комплекс электрооборудования. Его связи односторонни, а задача элементарна – бесперебойно подавать необходимое питание потребителям. Вторая группа имеет более развитые связи, хорошо прослеживаемые на примере комплекса управления силовыми установками. В полуавтоматическом режиме этот комплекс способен работать без внешних связей. Действительно, следя за показаниями приборов, бортинженер в состоянии управлять двигателями и воздухозаборниками вручную. Однако в автоматическом режиме, без получения информации о скорости и высоте полета, угле атаки и температуре наружного воздуха, система не работоспособна. Наконец, третья группа – это комплексы, имеющие наиболее разветвленные внешние связи и не способные работать без них ни в полуавтоматическом, ни в автоматическом режимах. Типичным для этой группы является навигационно-пилотажный комплекс.
Основные понятия и структурная схема приборного комплекса. Классификация навигационных комплексов
Под приборным комплексом будем понимать совокупность бортовых измерительных и вычислительных средств, служащих для восприятия, обработки, хранения и преобразования информации, необходимой для успешного выполнения полетного задания.
|
|
Обобщенная структурная схема современного бортового приборного комплекса представлена на рис. 2. здесь приняты следующие обозначения: УВИ – устройства, воспринимающие информацию о линейных и угловых координатах положения ЛА в пространстве или информацию о параметрах, характеризующих работу его силовых установок, отдельных систем и агрегатов; УОИ – устройства первичной обработки информации, поступившей от устройств, ее воспринимающих; БВС – бортовая вычислительная система; УИ – устройства индикации; УС – устройства сопряжения бортового приборного комплекса с другими системами и комплексами.
Отличительными особенностями задач, решаемых современными ЛА, являются все увеличивающиеся скорости, дальности и высоты полета в условиях действия разнообразных и многочисленных внешних факторов. При этом требования к точности и надежности решения полетных задач возрастают. Выполнить эти задачи возможно путем комплексирования приборного оборудования – его объединения на базе бортовых средств вычислительной технике.
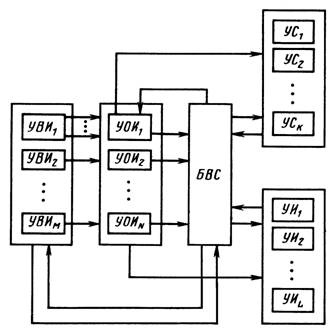
Рис. 2. Обобщенная структурная схема приборного комплекса
Для решения задач навигации и управления полетом современных ЛА оказалось необходимым увеличить число измеряемых параметров, усложнить алгоритмы навигационных задач, повысить точность и надежность измерений, существенно ускорить и автоматизировать обработку информации. Кроме текущей информации, получаемой от навигационных датчиков, существенно увеличилась роль априорной информации о режимах полета, константах и закономерностях методов измерений, параметрах заданных траекторий, ориентиров и целей. Хранение и использование априорной информации потребовало значительного объема памяти вычислительных машин. Решение всей совокупности перечисленных задач оказалось возможным при объединении отдельных навигационных устройств и подсистем в навигационные комплексы (НК). Процесс интенсивного развития навигационных систем начался в начале 60-х годов. На первом этапе развития были созданы и нашли широкое применение федеративные навигационные комплексы, отличающиеся ограниченным кругом решаемых задач и методов измерений; они обладают самостоятельным вычислителем, собственными средствами индикации, управления и контроля. К ним относятся воздушно-доплеровские, инерциально-доплеровские, астроинерциальные, радиоинерциальные и другие системы навигации. Их существенные недостатки: недостаточная связь между датчиками и нерациональное использование их информации, значительная загрузка человека-оператора обработкой и координацией измерений, управлением режимами работы комплекса и обеспечением надежности его функционирования.
|
|
С появлением в конце шестидесятых годов БЦВМ с достаточной памятью и быстродействием начались разработка и использование навигационных комплексов с централизованной обработкой потоков информации от датчиков. Недостатки таких комплексов: низкая надежность (при отказе БЦВМ выходит из строя весь навигационный комплекс), чрезмерная загрузка БЦВМ решением множества задач обработки первичной информации, сложность и громоздкость каналов связи датчиков с вычислительной машиной. Повышение надежности комплекса за счет резервирования БЦВМ (установка на ЛА двух или трех БЦВМ) значительно увеличивает массу, объем и стоимость оборудования.
В современных условиях, когда прогресс в развитии вычислительной техники привел к созданию большого многообразия микро-ЭВМ и микропроцессоров, появилась возможность создавать более совершенные и экономичные навигационные комплексы, обладающие высокой точностью, надежностью и адаптацией к условиям работы – интегральные навигационные комплексы с распределенным интеллектом, в которых получение и обработка информации производится по иерархическому принципу с применением микропроцессоров и современных средств отображения выходной информации.
Классификация НК:
- В зависимости от области использования НК разделяются на авиационные, ракетные, космические и др.
- В зависимости от многообразия режимов работы различают НК однорежимные, многорежимные и всережимные.
- В зависимости от информационной обеспеченности различают НК информационно-недостаточные, информационно-достаточные и информационно-избыточные.
- В зависимости от уровня адаптации различают НК стационарные, самонастраивающиеся, самоорганизующиеся и самообучающиеся.
- В зависимости от связи комплекса с человеком-оператором различают системы автоматические, эргономические и телеметрические.
- По способу обработки информации различают НК с аналоговой, цифровой и комбинированной обработкой.
- По характеру эксплуатации НК подразделяются на системы с наземным обслуживанием, полуавтоматическим и автоматическим обслуживанием.
|
|
|

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!