Содержание
Лабораторная работа. Информационное обеспечение и иерархическая структура навигационного приборного комплекса...................................................... 4
1. Цель работы.................................................................................................. 4
2. Теоретическая часть.................................................................................... 4
2.1. Введение. Комплексы оборудования самолетов................................. 4
2.2. Основные понятия и структурная схема приборного
комплекса. Классификация навигационных комплексов.......................... 7
2.3. Основные закономерности построения навигационных
комплексов...................................................................................................... 10
2.4. Информационное обеспечение ЛА...................................................... 13
2.5. Модули в навигационных комплексах............................................... 16
2.6. Иерархические структуры навигационных комплексов.................. 20
3. Задание......................................................................................................... 24
4. Описание лабораторной установки........................................................ 24
5. Порядок выполнения работы.................................................................. 24
6. Требования к отчету.................................................................................. 26
7. Контрольные вопросы.............................................................................. 26
Список литературы........................................................................................ 27
Приложение.................................................................................................... 28
Лабораторная работа
ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ
И ИЕРАРХИЧЕСКАЯ СТРУКТУРА
НАВИГАЦИОННОГО ПРИБОРНОГО КОМПЛЕКСА
Цель работы
Целью работы является изучение современных навигационных комплексов, их основополагающих закономерностей построения, модулей, составляющих навигационный комплекс, их иерархической структуры.
Теоретическая часть
Основные понятия и структурная схема приборного комплекса. Классификация навигационных комплексов
Под приборным комплексом будем понимать совокупность бортовых измерительных и вычислительных средств, служащих для восприятия, обработки, хранения и преобразования информации, необходимой для успешного выполнения полетного задания.
Обобщенная структурная схема современного бортового приборного комплекса представлена на рис. 2. здесь приняты следующие обозначения: УВИ – устройства, воспринимающие информацию о линейных и угловых координатах положения ЛА в пространстве или информацию о параметрах, характеризующих работу его силовых установок, отдельных систем и агрегатов; УОИ – устройства первичной обработки информации, поступившей от устройств, ее воспринимающих; БВС – бортовая вычислительная система; УИ – устройства индикации; УС – устройства сопряжения бортового приборного комплекса с другими системами и комплексами.
Отличительными особенностями задач, решаемых современными ЛА, являются все увеличивающиеся скорости, дальности и высоты полета в условиях действия разнообразных и многочисленных внешних факторов. При этом требования к точности и надежности решения полетных задач возрастают. Выполнить эти задачи возможно путем комплексирования приборного оборудования – его объединения на базе бортовых средств вычислительной технике.
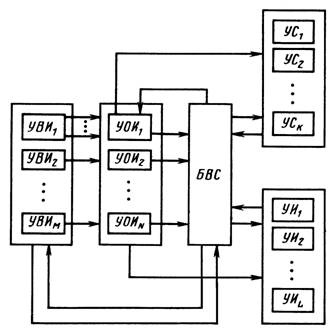
Рис. 2. Обобщенная структурная схема приборного комплекса
Для решения задач навигации и управления полетом современных ЛА оказалось необходимым увеличить число измеряемых параметров, усложнить алгоритмы навигационных задач, повысить точность и надежность измерений, существенно ускорить и автоматизировать обработку информации. Кроме текущей информации, получаемой от навигационных датчиков, существенно увеличилась роль априорной информации о режимах полета, константах и закономерностях методов измерений, параметрах заданных траекторий, ориентиров и целей. Хранение и использование априорной информации потребовало значительного объема памяти вычислительных машин. Решение всей совокупности перечисленных задач оказалось возможным при объединении отдельных навигационных устройств и подсистем в навигационные комплексы (НК). Процесс интенсивного развития навигационных систем начался в начале 60-х годов. На первом этапе развития были созданы и нашли широкое применение федеративные навигационные комплексы, отличающиеся ограниченным кругом решаемых задач и методов измерений; они обладают самостоятельным вычислителем, собственными средствами индикации, управления и контроля. К ним относятся воздушно-доплеровские, инерциально-доплеровские, астроинерциальные, радиоинерциальные и другие системы навигации. Их существенные недостатки: недостаточная связь между датчиками и нерациональное использование их информации, значительная загрузка человека-оператора обработкой и координацией измерений, управлением режимами работы комплекса и обеспечением надежности его функционирования.
С появлением в конце шестидесятых годов БЦВМ с достаточной памятью и быстродействием начались разработка и использование навигационных комплексов с централизованной обработкой потоков информации от датчиков. Недостатки таких комплексов: низкая надежность (при отказе БЦВМ выходит из строя весь навигационный комплекс), чрезмерная загрузка БЦВМ решением множества задач обработки первичной информации, сложность и громоздкость каналов связи датчиков с вычислительной машиной. Повышение надежности комплекса за счет резервирования БЦВМ (установка на ЛА двух или трех БЦВМ) значительно увеличивает массу, объем и стоимость оборудования.
В современных условиях, когда прогресс в развитии вычислительной техники привел к созданию большого многообразия микро-ЭВМ и микропроцессоров, появилась возможность создавать более совершенные и экономичные навигационные комплексы, обладающие высокой точностью, надежностью и адаптацией к условиям работы – интегральные навигационные комплексы с распределенным интеллектом, в которых получение и обработка информации производится по иерархическому принципу с применением микропроцессоров и современных средств отображения выходной информации.
Классификация НК:
- В зависимости от области использования НК разделяются на авиационные, ракетные, космические и др.
- В зависимости от многообразия режимов работы различают НК однорежимные, многорежимные и всережимные.
- В зависимости от информационной обеспеченности различают НК информационно-недостаточные, информационно-достаточные и информационно-избыточные.
- В зависимости от уровня адаптации различают НК стационарные, самонастраивающиеся, самоорганизующиеся и самообучающиеся.
- В зависимости от связи комплекса с человеком-оператором различают системы автоматические, эргономические и телеметрические.
- По способу обработки информации различают НК с аналоговой, цифровой и комбинированной обработкой.
- По характеру эксплуатации НК подразделяются на системы с наземным обслуживанием, полуавтоматическим и автоматическим обслуживанием.
Задание
1. Изучить классификацию современных навигационных комплексов.
2. Изучить основополагающие закономерности построения навигационных комплексов.
3. Рассмотреть модули, составляющие навигационный комплекс.
4. Изучить иерархическую структуру навигационных комплексов.
Порядок выполнения работы
Задание 1. Изучение принципа работы, особенностей построе-ния приборного и навигационного комплексов.
1.1. Ознакомиться с назначением отдельных элементов и прин-ципом работы приборного комплекса.
1.2. Проанализировать информационный состав навигационного комплекса.
1.3. Рассмотреть иерархическую структуру навигационных комплексов.
1.4. Ознакомиться с основными характеристиками ЦПНК-114
Задание 2. Анализ системы обработки информации в демонстрационном примере «Fly a Plane» системы Matlab.
2.1. Войти в Demo системы Matlab. Открыть демонстрационный пример «Fly a Plane» в папке Blocksets \ Dials & Gauges (рис. 7).
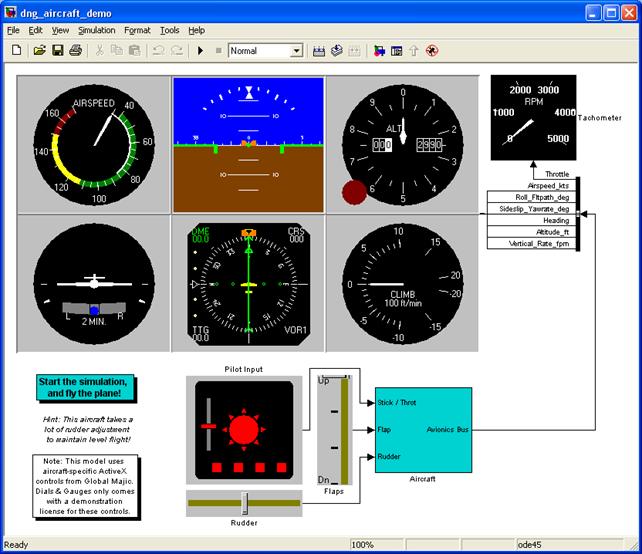
Рис. 7. Демонстрационный пример «Fly a Plane»
2.2. Провести анализ структуры системы обработки информации в демонстрационном примере «Fly a Plane» системы Matlab.
Задание 3. Моделирование демонстрационного примера «Fly a Plane» системы Matlab.
3.1. Провести моделирование системы управления летательным аппаратом в демонстрационном примере «Fly a Plane» системы Matlab.
3.2. Провести оценку качества рассмотренной системы и рассмотреть методы его улучшения.
Требования к отчету
Отчет по работе должен содержать:
1. Цель работы;
2. Структурные схемы приборных комплексов;
3. Основные формулы;
4. Назначение основных блоков, принцип работы;
5. Выводы.
По заданию 1 в отчёте приводятся структурная схема приборного комплекса; уравнения, определяющие компоненты вектора навигационного состояния; информационный состав навигационного комплекса; иерархическая структура навигационного комплекса; основные характеристики ЦПНК-114.
По заданию 2 в отчете приводятся результаты анализа структуры системы обработки информации в демонстрационном примере «Fly a Plane» системы Matlab.
По заданию 3 в отчёте приводятся полученные результаты моде-лирования системы управления летательного аппарата в демонстра-ционном примере «Fly a Plane» системы Matlab.
7. Контрольные вопросы
1. Состав и принцип работы приборного комплекса.
2. Классификация навигационных комплексов.
3. На чем основан принцип действия навигационного комплекса?
4. Написать уравнение движения ЛА как твердого тела относительно геоцентрической системы координат.
5. Какие группы устройств входят в информационное обеспечение навигационного комплекса?
6. Рассмотреть навигационный комплекс как совокупность модулей.
7. Какие уровни иерархии можно выделить в составе навигационного комплекса?
Список литературы
1. Агеев, В. М. Приборные комплексы летательных аппаратов и их проектирование: Учебник для студентов вузов по специальности «Авиационные приборы и измерительно-вычислительные комплексы» / В. М. Агеев, Н. В. Павлова / Под ред. В. В. Петрова. – М.: Машиностроение, 1990. – 432 с.
2. Помыкаев, И. И. Навигационные приборы и системы: Учебное пособие для студентов вузов / И. И. Помыкаев, В. П. Селезнев, Л. А. Дмитроченко. – М.: Машиностроение, 1983. – 456 с.
3. Кербер, Л. Л. Компоновка оборудования на самолетах / Л. Л. Кербер. – М.: Машиностроение, 1976. – 304 с.
4. Юровицкий, М. И. Компоновка кабин экипажа пассажирских самолетов / М. И. Юровицкий. – М.: Машиностроение, 1988. – 208 с.
5. Лазарев, Ю. Ф. Моделирование процессов и систем в MAT-LAB. Учебный курс / Ю. Ф. Лазарев. – СПб.: Питер; Киев: Издательская группа BHV, 2005. – 512 с.
6. www.niiao.ru
Приложение
| ЦИФРОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ЦПНК-114 ДЛЯ САМОЛЕТА МЕСТНЫХ ВОЗДУШНЫХ ЛИНИЙ ИЛ-114
|

|

|
Комплекс ЦПНК-114 обеспечивает удобное автоматизированное планирование полета, автоматическое решение навигационных задач и управление навигацией, автоматическое управление полетом на всех режимах от взлета до посадки, управление навигационными и пилотажными системами с помощью многофункциональных пультов, автоматический контроль работоспособности комплекса на земле и в полете.
Составные части комплекса спроектированы в соответствии с рекомендациями ARINC серии 700.
На многоцветных электронных экранах, установленных на приборной доске кабины пилотов наглядно отображаются навигационные и пилотажные параметры, состояние двигателей и самолетных систем, и осуществляется сигнализация отказов бортового оборудования самолета.
Автоматическое и ручное самолетовождение по запрограммированным траекториям на внутренних и зарубежных трассах обеспечивается с выполнением действующих навигационных требований на всех этапах полета в любое время суток и года. Комплекс обеспечивает автоматический, директорный и ручной заход на посадку на аэродромы в ожидаемых условиях эксплуатации самолета.
Продолжение прил.
Летная эксплуатация самолета с ЦПНК-114 осуществляется экипажем в составе двух пилотов.
Техническое обслуживание комплекса производится «по состоянию». Работоспособность систем в полете контролируется автоматически с глубиной контроля 0,9. В комплексе ЦПНК-114 осуществляется реконфигурация структуры, исключающая использование информации отказавшей аппаратуры или линии связи. При наземной подготовке обеспечивается режим «Расширенный контроль комплекса» и выработка сигнала «Комплекс исправен».
Информационный обмен между системами ЦПНК-114 осуществляется в соответствии с ARINC-429. Конструктивные параметры систем соответствуют рекомендациям ARINC-600.
26 апреля 1997 г. самолет ИЛ -114, оборудованный комплексом ЦПНК-114, получил сертификат летной годности для обеспечения пассажирских перевозок.
Комплекс разработан НИИ авиационного оборудования в содружестве с предприятиями авиационной и радиоэлектронной промышленности России и стран СНГ.
Состав комплекса
- Вычислительная система самолетовождения ВСС-85МВЛ-1, в которой реализованы функции системы сбора и локализации отказов (ССЛО-85);
- Вычислительная система управления полетом и тягой ВСУПТ-85МВЛ;
- Комплексная система электронной индикации и сигнализации КСЭИС-85МВЛ, в которой реализованы функции системы предупреждения критических режимов полета (СПКР-85);
- Система предупреждения о приближении земли СППЗ-85;
- Система воздушных сигналов СВС-85;
- Бесплатформенная система курса и вертикали СБКВ-85;
- Радиотехническая система ближней навигации и посадки РСБН А-331-05;
- Антенно-фидерная система АФС «Астра-114»;
Продолжение прил.
- Радиотехническая система спутниковой навигации СНС-85-01;
- Доплеровский измеритель скорости и угла сноса ДИСС-МВЛ (П-11);
- Самолетный ответчик СО-72М;
- Автоматический радиокомпас АРК-25;
- Радиовысотомер РВ-85;
- Метеонавигационная радиолокационная станция МНРЛС-85-114;
- Система посадки ILS-85;
- Радионавигационная система по маякам VOR, в которой совмещены функции маркерного радиоприемника VOR-85;
- Прецизионный радиодальномер ДМЕ/р-85;
- Приемник полного давления ППД-1М сер.2;
- Блок контроля обогрева приемников полного давления БКПД-1;
- Датчик температуры торможения П-104М;
- Блок питания БПТ36В-1;
- Привод регулирования тяги ПРТ-204;
- Датчик аэродинамических углов ДАУ-85-1;
- Механизм привода рулей МПР-114;
- Радио магнитный индикатор РМИ-3;
- Указатель приборной скорости УС-2;
- Барометрический высотомер ВБМ-1ПБ;
- Авиагоризонт резервный АГБ-96Р;
- Вариометр ВР-30ПБ;
- Магнитный компас КИ-13БС-1.
Выполняемые функции
В этом составе комплекс обеспечивает выполнение следующих функций:
1. Расширенный автоматизированный предполетный контроль работоспособности комплекса, выявление неисправного конструктивно-сменного блока и линии связи с глубиной контроля 0,95.
2. Формирование интегрального сигнала исправности и готовности комплекса к полету.
Продолжение прил.
3. Автоматизированный ввод программы полета: 30 маршрутов автоматически и 10 маршрутов вручную.
4. Хранение в энергонезависимой памяти ЦВМ ВСС-85МВЛ-1 40 маршрутов.
5. Автоматическая начальная выставка курса по курсу ВПП.
6. Автоматическое самолетовождение в горизонтальной плоскости по запрограммированному маршруту, в том числе и по кратчайшему расстоянию.
7. Автоматическое самолетовождение в вертикальной плоскости при полете по запрограммированному маршруту и в зоне аэродрома, и при оперативных изменениях экипажем профиля полета;
8. Автономная навигация (по данным ДИСС-МВЛ, СБКВ-85, СВС-85).
9. Навигация по радиомаякам РСБН, VOR/ДМЕ.
10. Спутниковая навигация по системе «Глонас».
11. Автоматическая и полуавтоматическая коррекция координат автономных средств по:
- азимуту и дальности РСБН А-331-05, VOR-85, ДМЕ/р-85;
- двум дальностям ДМЕ;
- данным СНС-85-01.
12. Автоматическая коррекция счисленных координат местоположения самолета по дальностям до 2-х запрограммированных радиомаяков РСБН (режим сканирования) и более 2-х дальностей маяков ДМЕ в зоне действия которых находится самолет;
13. Формирование и индикация географических и частно-ортодромических координат  ,
,  ,
,  ,
,  и поправок к координатам и курсу
и поправок к координатам и курсу  ,
,  ,
,  ,
,  ,
,  .
.
14. Формирование и индикация времени прибытия и расстояния полета до любого выбранного пункта маршрута или аэродрома в соответствии с программой полета.
15. Формирование и индикации времени прибытия в контрольную точку маршрута и сигнала о достижении критического остатка топлива;
16. Оперативное изменение траектории и программы полета в горизонтальной и вертикальной плоскостях.
Продолжение прил.
17. Автоматическая стабилизация: курса, крена, тангажа, барометрической высоты, приборной скорости.
18. Стабилизация и управление приборной скоростью через канал тяги по сигналам ВСС-85МВЛ-1 и ВСУПТ-85МВЛ на маршруте и при заходе на посадку;
19. Стабилизация и управление вертикальной скоростью при наборе высоты и снижении через руль высоты и канал тяги;
20. Выход на заданную высоту (заданный эшелон) и стабилизация заданной высоты (заданного эшелона);
21. Автоматическое триммирование руля высоты.
22. Предупреждение экипажа:
- о возможности выхода за допустимые параметры движения по заданной траектории по высоте, боковому уклонению и по времени прибытия в любую запрограммированную точку;
- о приближении к эксплуатационным ограничениям по углу атаки, приборной скорости, крену, вертикальной перегрузке;
- о достижении минимальной безопасной высоты на всех этапах полета;
- об опасной скорости сближения с земной поверхностью;
- о полете вблизи земли с не выпущенными шасси или с закрылками не в посадочной конфигурации;
- о превышении допустимой вертикальной скорости снижения.
23. Обнаружение опасных явлений погоды (зон активной грозовой деятельности, градовых образований, мощной кучевой облачности).
24. Обход в ручном режиме управления очагов опасных явлений природы с последующим автоматическим выходом на запрограммированный маршрут по кратчайшему расстоянию.
25. Автоматическое переключение систем ЦПНК-114 с режима маршрута на режим захода на посадку;
26. Автоматическое предпосадочное маневрирование в зоне аэродрома с кренами до 30° в соответствии с установленными схемами захода на посадку;
27. Автоматический и директорный заход на посадку по I категории ИКАО по радиомаякам СП/ILS и ПРМГ.
Продолжение прил.
28. Автоматический заход на посадку по II категории ИКАО по маякам СП/ILS;
29. Автоматический уход на 2-ой круг;
30. Автоматический выбор программных радиомаяков и управление РТС навигации и посадки согласно плану полета.
31. Централизованное ручное управление (с ПУИ-95) РТС навигации и посадки.
32.Обмен информацией с отечественными и зарубежными автоматизированными системами УВД по каналу вторичной радиолокации с дискретно-адресным запросом.
33.Автоматическая сигнализация экипажу и регистрация в полете отказов систем.
34.Отображение экипажу на электронных цветных индикаторах, пультах управления и резервных приборах пилотажно-навигационной информации и команд для контроля за параметрами движения.
Комплекс также обеспечивает:
- вертикальное эшелонирование через 300 м во всем диапазоне эксплуатационных высот полета самолета;
- продольное эшелонирование через 5 мин и определение времени пролета пунктов обязательного донесения, находящихся на расстоянии не более 400 км, с точностью не более ± 2 мин ( );
);
- боковое эшелонирование в соответствии с минимальными навигационными требованиями при полетах во внеаэродромном пространстве в районах:
с высокой интенсивностью воздушного движения ( км);
км);
со средней интенсивностью воздушного движения ( км);
км);
над безориентирной местностью ( км).
км).
Условия применения:
по широте ------------------------------------------------------ ±90°;
по долготе ------------------------------------------------------ ±180°;
высота до ------------------------------------------------------- 15000 м;
скорость полета до ------------------------------------------- 800 км/час;
Окончание прил.
дальность полета до ----------------------------------------- 5000 км;
скорость ветра до -------------------------------------------- 200 км/час;
температура наружного воздуха -------------------------- ±60°С;
атмосферное давление в зоне аэродрома ---------------- 700-1075 гПа
(525-806 мм рт.ст.);
время непрерывной работы -------------------------------- до 10 ч.
Технические характеристики
Погрешность определения координат ():
- по данным автономных средств 2%  ,
,
- по данным СНС ±100 м;
Погрешность стабилизации ():
- курса, крена, тангажа 0,5°,
- заданной линии пути от ВСС-85МВЛ 200 м,
- приборной скорости через автомат тяги 5,6 км/ч,
- барометрической высоты 10 м – на маршруте, 20 м – на разворотах.
Средний налет на отказ и повреждение, обнаруженное в полете при налете самолета не менее 3000 летных часов:
- для комплекса  ------------------------------
------------------------------  90 летных часов,
90 летных часов,
- для систем комплекса --------------------- 5000 летных часов.
Потребляемая мощность комплекса:
- от сети переменного тока 115/200 В 400 Гц не более 5700 ВА;
- от сети постоянного тока 27 В не более 1800 Вт.
Время подготовки и приведения комплекса в рабочее состояние с учетом времени ввода и контроля программы полета из ВЗУ ВСС-85МВЛ и времени формирования сигнала готовности комплекса к полету 10 мин.
Масса комплекса (блоки, пульты, приборы, антенны, рамы, высокочастотные кабели, делители мощности, устройства питания антенн, симметрирующие устройства, соединительные колодки и другие детали для монтажа на самолете) – 510 кг.
Содержание
Лабораторная работа. Информационное обеспечение и иерархическая структура навигационного приборного комплекса...................................................... 4
1. Цель работы.................................................................................................. 4
2. Теоретическая часть.................................................................................... 4
2.1. Введение. Комплексы оборудования самолетов................................. 4
2.2. Основные понятия и структурная схема приборного
комплекса. Классификация навигационных комплексов.......................... 7
2.3. Основные закономерности построения навигационных
комплексов...................................................................................................... 10
2.4. Информационное обеспечение ЛА...................................................... 13
2.5. Модули в навигационных комплексах............................................... 16
2.6. Иерархические структуры навигационных комплексов.................. 20
3. Задание......................................................................................................... 24
4. Описание лабораторной установки........................................................ 24
5. Порядок выполнения работы.................................................................. 24
6. Требования к отчету.................................................................................. 26
7. Контрольные вопросы.............................................................................. 26
Список литературы........................................................................................ 27
Приложение.................................................................................................... 28
Лабораторная работа
ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ
И ИЕРАРХИЧЕСКАЯ СТРУКТУРА
НАВИГАЦИОННОГО ПРИБОРНОГО КОМПЛЕКСА
Цель работы
Целью работы является изучение современных навигационных комплексов, их основополагающих закономерностей построения, модулей, составляющих навигационный комплекс, их иерархической структуры.
Теоретическая часть





