Вращение
Вращение вокруг начала координат против часовой стрелки на угол  реализуется матрицей
реализуется матрицей 
На угол

– матрицей

На угол  – матрицей
– матрицей 
Вращение осуществляется вокруг оси, перпендикулярной к плоскости  .
.

Отображение
Отображение определяется поворотом на вокруг оси, лежащей в плоскости .
Отображение относительно оси  осуществляется матрицей
осуществляется матрицей 
Относительно оси  – матрицей
– матрицей 
Относительно оси  – матрицей
– матрицей 


Изменение масштаба
Изменение масштаба определяется значением элементов главной диагонали матрицы 2´2 Если элементы главной диагонали матрицы  не равны, то происходит искажение формы.
не равны, то происходит искажение формы.
Произвольная матрица вращения 2x2
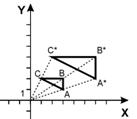
На примере единичного квадрата получим общий вид матрицы вращения на угол  .В случае преобразования единичного квадрата координаты точки
.В случае преобразования единичного квадрата координаты точки  определяют первую строку матрицы, а точки
определяют первую строку матрицы, а точки  – вторую строку. Таким образом, матрица вращения на произвольный угол определяется как
– вторую строку. Таким образом, матрица вращения на произвольный угол определяется как


Частные случаи, рассмотренные выше, легко получаются подстановкой значений  .
.
Композиция преобразований на плоскости
последовательность преобразований  может быть реализована как
может быть реализована как 
Произведение матриц называют их композицией. Соответственно, преобразования с матрицей  называется композицией преобразований с матрицами
называется композицией преобразований с матрицами  . Последовательность умножения матриц важна.
. Последовательность умножения матриц важна.
Один из примеров композиции преобразований с использованием однородных координат–это вращение вокруг произвольной точки. Вращение вокруг произвольной точки может быть выполнено путем переноса центра вращения в начало координат, поворотом относительно начала координат, а затем переноса точки вращения в исходное положение. То есть поворот точки  вокруг точки
вокруг точки  на угол выполняется следующим образом
на угол выполняется следующим образом

Композиция трех матриц преобразования дает общую матрицу вращения вокруг произвольной точки

В частности, для 
 ;
;
для 
;для 
 .
.
хотя композиция (умножение) матриц в общем случае не коммутативно, но в некоторых частных случаях коммутативность имеет место, то есть  , если
, если  ,
,  :
:
перенос, перенос
масштабирование, масштабирование
поворот, поворот
обшее масштабирование, поворот
3. Двумерное смещение и однородные координаты. Точки в бесконечности.
Точки в бесконечности
Однородные координаты могут представлять точки в бесконечности, лежащие на некоторой прямой.
Двумерный вектор однородных координат  образует точку в бесконечности на линии
образует точку в бесконечности на линии 
Для иллюстрации этого рассмотрим линию  и точку, однородные координаты которой имеют вид
и точку, однородные координаты которой имеют вид  , при
, при  .
.
Видно, что при  . При этом все время сохраняется соотношение
. При этом все время сохраняется соотношение  , то есть точка движется в бесконечность по указанной прямой. Из этого следует, например, что вектор однородных координат
, то есть точка движется в бесконечность по указанной прямой. Из этого следует, например, что вектор однородных координат  характеризует точку в бесконечности на оси абсцисс
характеризует точку в бесконечности на оси абсцисс  ; вектор
; вектор  – точку в бесконечности на оси ординат
– точку в бесконечности на оси ординат  .
.
4. Трехмерные преобразования и проекции
Точка в трехмерном пространстве  с использованием однородных координат представится четырехмерным вектором
с использованием однородных координат представится четырехмерным вектором  или
или  .
.
Преобразование однородных координат описывается соотношениями  ;
;  ,
,
где –матрица преобразования. Обобщенная матрица для трехмерных однородных координат имеет порядок  и записывается как
и записывается как

Эта матрица может быть представлена как совокупность четырех частей:
Матрица  осуществляет покоординатное изменение масштаба, сдвиг и вращение; элементы матрицы
осуществляет покоординатное изменение масштаба, сдвиг и вращение; элементы матрицы  – перенос; Элементы матрицы
– перенос; Элементы матрицы  – преобразования в перспективе; Элемент матрицы
– преобразования в перспективе; Элемент матрицы  – общее изменение масштаба.
– общее изменение масштаба.
Изменение масштаба
Покоординатное изменение масштаба выполняется с помощью диагональных элементов :

Общее изменение масштаба –либо 
либо 
Сдвиг
За преобразование сдвига “отвечают” недиагональные элементы верхней левой подматрицы 

Пространственный перенос
Трехмерный линейный перенос изображения определяется выражением: 
откуда 

то есть 
Аксонометрические проекции
Аксонометрическая проекция получается с помощью преобразования, определитель которого равен нулю. После выполнения преобразования осуществляется параллельное проецирование.
Существуют три вида аксонометрических проекций, различающихся по виду аффинного преобразования – ортогональная, диметрическая и изометрическая. Прежде чем остановиться на них, рассмотрим общую для всех этих видов часть – параллельное проецирование.
Проекция из трехмерного пространства на плоскость может быть получена следующим образом:

то есть 
Это преобразование представляет собой композицию двух преобразований:  – параллельного проецирования на плоскость
– параллельного проецирования на плоскость 

и переноса вдоль оси  на величину
на величину 

Аналогично, проецирование в плоскость x = l или y = m реализуется матрицами

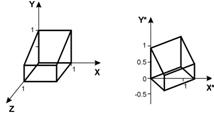
Диметрическая проекция
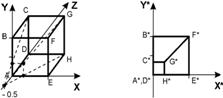
При построении диметрической проекции производится комбинированное вращение, при котором одинаково сокращаются две из трех координатных осей.
– вращение вокруг оси Y на угол  ;
;
– вращение вокруг оси  на угол
на угол  ;
;
– параллельное проецирование на плоскость ;
Единичный вектор оси  в результате такого преобразования преобразуется к виду
в результате такого преобразования преобразуется к виду 
и имеет длину 
Аналогично, единичный вектор оси  преобразуется к
преобразуется к  и имеет длину
и имеет длину 
По условию диметрической проекции значения двух преобразованных единичных векторов сокращаются в равное число раз. Приравнивая значения векторов осей  и
и  , получим
, получим


используя

Таким образом, мы получим требуемое соотношение между углами и для построения диметрической проекции. При этом, конкретные значения одного из углов можно выбрать произвольно.
Будем выбирать θ таким образом, чтобы ось z сократилась в фиксированное число раз, например, в ½ Единичный вектор оси z [0011] преобразуется к [sin Ф – cos Ф sin 0 1 ] длиной 
Требование уменьшить его в длину ½ означает




Изометрическая проекция
В отличие от диметрической в изометрической проекции ставится условие равного сокращения всех трех координатных осей, т.е.


Или  и
и 
Решая совместно эти уравнения, получим 
Отметим, что угол между преобразованным единичным вектором оси и исходным составляет 
Перспективные преобразования и проекции
Перспективная проекция получается путем перспективного преобразования и проецирования на некоторую плоскость наблюдения. перспективную проекцию получаем путем выполнения одной из двух последовательностей преобразований:
1) перспективное преобразование в 3-мерном пространстве и параллельное проецирование.
2) аффинные преобразования в 3-мерном пространстве и центральное (перспективное преобразование) проецирование.
Перспективная проекция на плоскость обеспечивается преобразованием
 т.е.
т.е. 
Каждая точка (например, C) переводится в точку C путем центральной проекции, центр которой лежит на оси в точке с координатами  . Из рассмотрения подобных треугольников
. Из рассмотрения подобных треугольников  и
и  видно, что
видно, что  или
или 
Аналогично, из треугольников  и
и 

При  перспективное преобразование вырождается в аксонометрическое.
перспективное преобразование вырождается в аксонометрическое.
Проекцию из другой точки можно получить, выполнив предварительно аффинные преобразования, переводящие центр проекции в требуемое положение, или, помещающее объект в нужное положение и под нужный ракурс. При этом координата  у всех точек останется равной 1, т.к. 4-й столбец матрицы аффинных преобразований
у всех точек останется равной 1, т.к. 4-й столбец матрицы аффинных преобразований  . После этих преобразований выполняется центральное проецирование.
. После этих преобразований выполняется центральное проецирование.
С другой стороны, при проецировании на плоскость информация о координате теряется. Иногда это неудобно. В этом случае можно выполнить перспективное преобразование, например матрицей
а затем параллельное проецирование.Видно, что полученное 3-х мерное изображение и проекция воспринимаются скошенными, что дает неверное визуальное представление об их глубине. Возьмем точку в бесконечности на оси и выполним перспективное преобразование:

Т.к.параллельные линии исходного пространства “сходятся” в бесконечности, то в преобразованном пространстве линии, которые были параллельны оси , будут сходиться в точке  . Эту точку называют точкой схода.
. Эту точку называют точкой схода.
Аналогично, перспективное преобразование 

будет приводить к точке схода 
Преобразование  будет приводить к точке схода
будет приводить к точке схода 
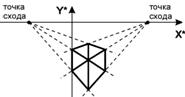
Эти преобразования одноточечные (имеют одну точку схода). Их еще называют параллельными перспективными преобразованиями. Если в 4-м столбце матрицы два элемента ненулевые, то получим двухточечную или угловую перспективу
 ,
,
 =
= 
Точки схода в данном случае расположены на оси  и на оси
и на оси  .
.
Для построения реалистичной проекции недостаточно просто отцентрировать объект. Его нужно еще повернуть определенным образом.
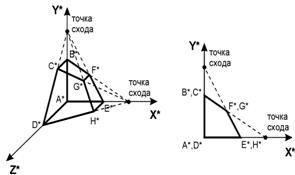
При построении перспективных проекций для получения “правильных” (реалистических) изображений часто полезно выполнить ряд предварительных аффинных преобразований поворотов вокруг координатных осей и смещений. При этом может измениться вид перспективы. Повернем единичный куб вокруг оси на угол и сместим его к точке . Затем построим одноточечную перспективную проекцию с центром в точке  на оси на плоскости
на оси на плоскости  Матрица:
Матрица:

Т.е. матрица преобразования дает двухточечную перспективу.
При этом линии, которые были параллельны оси , остались параллельны, а линии, которые были параллельны осям и , сходятся в точках  и
и  на оси .Трех точечная перспектива получается, если предварительно выполнено вращение вокруг двух координатных осей.
на оси .Трех точечная перспектива получается, если предварительно выполнено вращение вокруг двух координатных осей.
ОКРУЖНОСТЬ.
Окружность с центром в точке  и радиусом r задается уравнением
и радиусом r задается уравнением 
Раскрывая скобки: 
Или  где
где 


Таким образом, уравнение окружности содержит три неизвестных коэффициента. Соответственно, для построения окружности (или дуги окружности) необходимо знать три точки, через которые она проходит: две концевые точки дуги и одну промежуточную. Однако построение дуги окружности через три заданные точки - это не единственный способ. Дуга окружности будет определена, если известны
1) две концевые точки и центр;
2) одна концевая точка и наклон в начале и в конце и т. д.
ЭЛЛИПС.
Эллипсом называется геометрическое место точек плоскости, для каждой из которых сумма расстояний до двух данных точек той же плоскости, называемых фокусами эллипса, есть величина постоянная 
Уравнение эллипса в канонической форме:
 ;
; 
Приведем его к общему виду:


то есть


то есть уравнение определяет эллипс, если 
ПАРАБОЛА.
Парабола есть геометрическое место точек, равноудаленных от данной точки, называемой фокусом, и данной прямой, называемой директрисой.

Уравнение параболы

 т.е.
т.е. 
При 
( – координаты вершины;
– координаты вершины;  – параметр, определяющий расстояние между директрисой и фокусом)
– параметр, определяющий расстояние между директрисой и фокусом)
Приведенное уравнение представляет параболу, осью симметрии которой является  . Если
. Если  и
и  поменять местами, осью симметрии будет
поменять местами, осью симметрии будет  . Если
. Если  , то ветви параболы будут направлены в положительную сторону (вверх или вправо), если
, то ветви параболы будут направлены в положительную сторону (вверх или вправо), если  - в отрицательную сторону (вниз или влево).
- в отрицательную сторону (вниз или влево).
ГИПЕРБОЛА.
Гиперболой называется множество всех точек плоскости, для которых модуль разности расстояний от двух данных точек, называемых фокусами, есть величина постоянная, меньшая, чем расстояние между фокусами.Уравнение:
 или
или 
Здесь  и
и  ;
; 

Будем рассматривать гиперболу, центрированную относительно начала координат и с положительной полуосью x в качестве оси симметрии.
Тогда в непараметрическом виде ее уравнение запишется как 
7. Представление пространственных кривых.
параметрически.
Непараметрическое явное задание: 
Непараметрическое неявное задание - кривая на пересечении двух поверхностей: 
Параметрическое задание: 

Простейший пример - цилиндрическая спираль:

 - радиус,
- радиус,  - шаг спирали.
- шаг спирали.
Очень часто аналитическое описание неизвестно. В этом случае ставится задача проведения кривой через ряд заданных точек, или проведения кривой, имеющей более сложную зависимость от заданных точек.
КУБИЧЕСКИЕ СПЛАЙНЫ.
Математически сплайн описывается полиномом k - той степени. Чаще всего используют полиномы третьей степени - кубические сплайны. Конкретный вид кубического сплайна определяется координатами точек, через которые его надо провести (концевых точек) и наклоном в этих точках.
Если требуется провести гладкую кривую между точками, то используется совокупность  сплайнов - так называемые сплайновые сегменты. При этом предъявляется требование непрерывности второго порядка в местах соединений.
сплайнов - так называемые сплайновые сегменты. При этом предъявляется требование непрерывности второго порядка в местах соединений.
Уравнение единственного кубического сплайнового сегмента в параметрической форме выглядит следующим образом:
 , где
, где  - вектор положения произвольной точки на сплайне.
- вектор положения произвольной точки на сплайне.

Коэффициенты  определяются координатами концов сегмента (
определяются координатами концов сегмента ( и
и  ) и касательными векторами на концах
) и касательными векторами на концах  и
и  , которые являются произвольными по параметру
, которые являются произвольными по параметру  .
.
Внутри сплайнового сегмента параметр меняется от  до
до  ( соответствует
( соответствует  ).
).
Обычно полагают  . Тогда
. Тогда



Отсюда получим



Окончательно имеем
 ,
, 

Отсюда уравнение одного кубического сплайнового сегмента:
 Кубические сплайновые кривые широко распространены, однако имеют ряд недостатков. Например, с их помощью нельзя точно передать дугу окружности, а только приближенно. Примеры:
Кубические сплайновые кривые широко распространены, однако имеют ряд недостатков. Например, с их помощью нельзя точно передать дугу окружности, а только приближенно. Примеры:
КРИВЫЕ БЕЗЬЕ
Кривая Безье определяется несколькими точками – так называемыми вершинами многоугольника. При этом кривой принадлежат лишь первая и последняя точки, а остальные задают ее форму.

В методе Безье порядок любого криволинейного сегмента может быть увеличен путем задания дополнительных вершин.
Математически кривая Безье описывается полиномиальной функцией, построенной в так называемом базисе Бернштейна. Базисная функция в нем задается соотношением
 , где
, где  ,
, 
Здесь - степень полинома;  – порядковый номер отдельной вершины.
– порядковый номер отдельной вершины.
Точки кривой в базисе Бернштейна задаются как
 ,
, 
то есть -й порядок полинома характеризуется  – й вершиной.
– й вершиной.
В начальной точке 

 ,
, 
В конечной точке 

То есть  и
и  , вершины
, вершины  и
и  действительно являются началом и концом криволинейного сегмента.
действительно являются началом и концом криволинейного сегмента.
В-СПЛАЙНЫ
Еще одним методом гладкой кривой между двумя точками (концами), форма отдельных участков которой определяется промежуточными точками, является метод В -сплайнов. Вначале определим понятие В –сплайна. Произвольная точка кривой  ,то есть ее вектор положения, задается в В -сплайн базисе следующим образом:
,то есть ее вектор положения, задается в В -сплайн базисе следующим образом: 
Здесь  - вершины характеристического многоугольника,
- вершины характеристического многоугольника,  ;
;  – базисные функции; - порядок кривой; – параметр, изменяющийся в диапазоне от 0 до
– базисные функции; - порядок кривой; – параметр, изменяющийся в диапазоне от 0 до  В отличие от метода кривых Безье, где
В отличие от метода кривых Безье, где  в методе В -сплайнов величина
в методе В -сплайнов величина  и определяется порядком кривой, а также наличием так называемых кратных вершин
и определяется порядком кривой, а также наличием так называемых кратных вершин
Для определения базисных функций  введем понятие узлового вектора. Узловой вектор или вектор параметрических узлов представляет собой последовательность целых положительных чисел
введем понятие узлового вектора. Узловой вектор или вектор параметрических узлов представляет собой последовательность целых положительных чисел 

в которой  . Примерами узлового вектора является
. Примерами узлового вектора является  или
или  и т. д. Значения
и т. д. Значения  рассматриваются как параметрические узлы, характеризующие различные интервалы изменения параметра . Размерность узлового вектора и конкретные значения узлов зависят от числа вершин задающего многоугольника, то есть от , порядка кривой и сложности вершин.
рассматриваются как параметрические узлы, характеризующие различные интервалы изменения параметра . Размерность узлового вектора и конкретные значения узлов зависят от числа вершин задающего многоугольника, то есть от , порядка кривой и сложности вершин.
Сложная (или кратная) вершина это две или более вершины с одинаковыми координатами. В узловом векторе сложным вершинам соответствует последовательность одинаковых по величине компонент  , где
, где  – кратность вершины.
– кратность вершины.
Алгоритм формирования узлового вектора следующий. Входными параметрами являются:
1) массив вершин задающего многоугольника, в котором  - кратная вершина представлена как - простых вершин с совпадающими координатами - массив
- кратная вершина представлена как - простых вершин с совпадающими координатами - массив  ;
;
2) – число вершин без l;
3) – порядок кривой.
На выходе формируется вектор  . Размерность вектора определяется, как
. Размерность вектора определяется, как  , то есть
, то есть

1) Для 
 ;
;
2) Для  , если
, если  , то
, то  если
если  , то
, то 
3) Для 

Отметим одно общее правило: начальные и конечные вершины условно считываются - кратными, однако, в отличии от кратных промежуточных вершин, это не приводит к увеличению , а лишь отражается в узловом векторе.
Теперь определим базисные функции  . Они задаются рекуррентным соотношением
. Они задаются рекуррентным соотношением


отсюда видно, что если порядок кривой равен , то функция  , соответствующая i- вершине
, соответствующая i- вершине  , не равна нулю только на промежутке
, не равна нулю только на промежутке  то есть каждая вершина
то есть каждая вершина  имеет ограниченное (локальное) влияние на форму кривой. Если порядок кривой равен числу вершин и отсутствуют сложные вершины, то В -сплайн кривая совпадает с кривой Безье; с уменьшением порядка форма кривой приближается к форме описывающего ее многоугольника.
имеет ограниченное (локальное) влияние на форму кривой. Если порядок кривой равен числу вершин и отсутствуют сложные вершины, то В -сплайн кривая совпадает с кривой Безье; с уменьшением порядка форма кривой приближается к форме описывающего ее многоугольника.
При  кривая полностью совпадает с многоугольником. При k = 4 – это кривая Безье; при k = 3 – промежуточное положение.
кривая полностью совпадает с многоугольником. При k = 4 – это кривая Безье; при k = 3 – промежуточное положение.
Чем выше порядок, тем больше форма кривой отличается от формы задающего многоугольника.
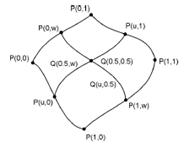
БИЛИНЕЙНЫЕ ПОВЕРХНОСТИ
P (u, w) — вектор, полученный по известным или входным данным;
Q(u, w) — вектор конструируемой поверхности.
Это один из простейших видов поверхностей. Предположим, что четыре угловые точки поверхности заданы на плоскости  вершинами единичного квадрата
вершинами единичного квадрата  Необходимо построить поверхность
Необходимо построить поверхность  , на которой любая точка может быть получена путем линейной интерпретации. Получим следующую функцию:
, на которой любая точка может быть получена путем линейной интерпретации. Получим следующую функцию:  Или
Или  или
или  где
где 

Здесь легко проверить, что  и так далее. Точка в центре поверхности
и так далее. Точка в центре поверхности  получится
получится 

ЛИНЕЙЧАТЫЕ ПОВЕРХНОСТИ
Линейчатые поверхности часто применяют в авиационной и кораблестроительной промышленности. Строятся они следующим образом. Предполагаются, что известны две граничные кривые. Допустим, что это  и
и  . Линейчатая поверхность получается с помощью линейной интерполяции между этими кривыми.
. Линейчатая поверхность получается с помощью линейной интерполяции между этими кривыми. 
Здесь 

Края конструируемой поверхности совпадают с заданными кривыми, то есть 
ЛИНЕЙНЫЕ ПОВЕРХНОСТИ КУНСА
Пусть известны четыре граничные кривые P(u, 0), P(u, 1), P(0, w) и P(1, w). Линейная поверхность Кунса получается суммированием координат точек линейчатых поверхностей между кривыми  Однако при этом границы полученной поверхности не будет совпадать с заданными граничными кривыми:
Однако при этом границы полученной поверхности не будет совпадать с заданными граничными кривыми:
 Это происходит потому, что угловые точки просчитываются дважды, так как содержится в описании обеих линейчатых поверхностей. Правильный результат дает следующее уравнение поверхности:
Это происходит потому, что угловые точки просчитываются дважды, так как содержится в описании обеих линейчатых поверхностей. Правильный результат дает следующее уравнение поверхности: 
В матричной форме это уравнение имеет вид
 Функции
Функции  называются весовыми функциями.
называются весовыми функциями.
ПОВЕРХНОСТИ БЕЗЬЕ
Описание участка поверхности Безье может быть представлено в той же форме, что и участка бикубической поверхности, но с другими весовыми функциями. Например, участок поверхности с шестнадцатью вершинами может быть описан как:
В матрице  записаны координаты точек, образующих участок поверхности. При этом самой поверхнос
записаны координаты точек, образующих участок поверхности. При этом самой поверхнос