Тип КЭ определяет число степеней свободы, его форму (одномерный, треугольный, четырёхугольный и др.), размерность КЭ (линейный, изопараметрический). Для конечно-элементной модели (КЭМ) структуры ПКМ выбираем плоский четырёхугольный 4-узловой элемент с функцией формы второго порядка Plane 182.
Используют такую запись: сначала указывают из какого меню будет выполнена команда(M_M: или U_M:, где M_M - это Main Menu, U_M - Utility Menu), далее записываются выполняемые команды по порядку.
Для выбора КЭ. Выполняем следующие действия. M_M: Preprocessor>Element Type>Add/Edit/Delete.
Нажимаем кнопку Add (добавить новый тип КЭ).

Рисунок 2.17. Выбор конечных элементов
В левом окне (в библиотеке элементов Рисунок 2.17) выбираем Structural Solid.
В окне Selection указываем Quad 4 node 182 и нажимаем ОK.
Закрываем окно Close.
Определение свойств материала модели
Main Menu>Preprocessor>Material Props>Material Models
Задаём упругие константы для эпоксидной матрицы. На правой стороне окна «Define Material Model Behavior» Рисунок 2.18 двойной клик на ‘Structural’, затем ‘Linear’, затем ‘Elastic’, и на ‘Isotropic’.

Рисунок 2.18. Задание свойств материала
В открывшемся окне пишем значения модуля Юнга (EX = 3,32E9 Па) (параметры материала задаются в системе СИ), и коэффициента Пуассона (PRXY = 0.38) для нашего материала.
Нажмите ОК в окне «Define Material Model Behavior»
5. Задаём упругие константы для углеродного волокна (Рисунок 2.19). Для этого создаём Material Model Number 2 - U_M - Utility Menu > Material >New Material. На правой стороне окна «Define Material Model Behavior» двойной клик на ‘Structural’, затем ‘Linear’, затем ‘Elastic’, и на ‘Orthotropic’.

Рисунок 2.19. Выбор нового материала
Далее в поле EX, EY, EZ вводим значения модуля упругости первого рода, в поле PRXY, PRXZ, PRYZ коэффициент Пуассона, в поле GXY GYZ GXZ вводим значения модуля упругости второго рода. Нажимаем ОК.
Все введённые данные находятся в оперативной памяти компьютера. Для их сохранения в файл "Model_1" на инструментальной панели выбрать Toolbar (TB):Save_db.
Создание геометрической модели.
Создание блока волокна и матрицы в соответствии с объёмным содержанием в глобальной системе координат (Рисунок 2.20).
Main Menu>Preprocessor>Modeling>Create>Areas> Rectangle>by Dimensions


Рисунок 2.20. Геометрическая модель.
Присвоение блокам свойств волокна и матрицы
М_М: Preprocessor>Meshing>Mesh Attributes>Picked Area.
Последовательно присваиваются значения упругих констант и назначается выбранный конечный элемент плоскостям, моделирующим компоненты ПКМ.
Разбиение модели на КЭ.
Установка глобального размера КЭ:
М_М: Preprocessor>Meshing>Mesh Tool.
В поле Smart size ввести уровень точности - 2, отметить Global-Free и ОК.
Нанесение конечно-элементной сетки:
M_M: Preprocessor->Meshing->Mesh->Areas->Free.
Нажать Picked Area для выбора блоков модели. На Рисунок 2.21 представлена КЭ модель

Рисунок 2.21 Конечно-элементная модель
Задание граничных условий.
9.1 Перемещения (Displacement) на верхней и нижней границах модели:
М_М: Preprocessor>Define Loads>Apply>Structural>Displacement>On Nods.
Отметить все узлы конечно элементной модели по горизонтальной линии нижней границы модели и нажимаем ОК.
Выбрать строку UY (перемещения по оси Y).
Ввести 0 в поле Value (определить для всех узлов нулевые перемещения).
Отметить все узлы конечно элементной модели по горизонтальной линии верхней границы модели и нажимаем ОК (Рисунок 2.22).
Выбрать строку UY (перемещения по оси Y).
Ввести абсолютное значение перемещения верхней границы модели соответствующее относительному удлинению углеродного волокна при разрыве в поле Value (определить для всех узлов положительное перемещение).
.



Рисунок 2.22. Точки закрепления
9.2 Соединение узлов между собой с ограничением степеней свободы (Coupling DOF) на левой, правой границах модели и границе раздела:
М_М: Preprocessor> Coupling DOF > Coupling DOF> On Nods.
Отметить все узлы конечно элементной модели по левой вертикальной границе модели и нажимаем ОК.
Выбрать строку UX (связать узлы и ограничить степень свободы по вертикали и горизонтали).
Отметить все узлы конечно элементной модели по правой вертикальной границе модели и нажимаем ОК.
Выбрать строку UX (связать узлы по вертикали).
Отметить все узлы конечно элементной модели по границе раздела до дефекта в виде поры и после, узлы КЭ принадлежащие поре не соединяются и могут свободно перемещаться. Нажимаем ОК.
Выбрать строку ALL (связать узлы и ограничить степень свободы по вертикали и горизонтали). Таким образом, моделируется идеальное взаимодействие между волокном и матрицей на границе раздела фаз, исключая пору, где взаимодействия вообще нет.


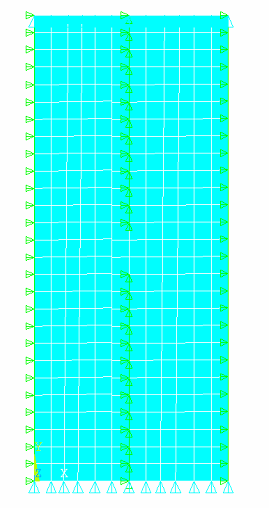
Рисунок 2.23 Точки соединения (nodes)
Решение (Solving)
Решение задачи включает в себя определение методов и параметров расчета, задание граничных условий, запуск решателя.
Расчёт.
MM: Solution>Solve>Current LS.
Нажать ОК для запуска программы на счёт, предварительно проанализировав сообщение окне /STAT Command (Рисунок 2.24).
После решения задачи закрыть окно Information, нажав Close.
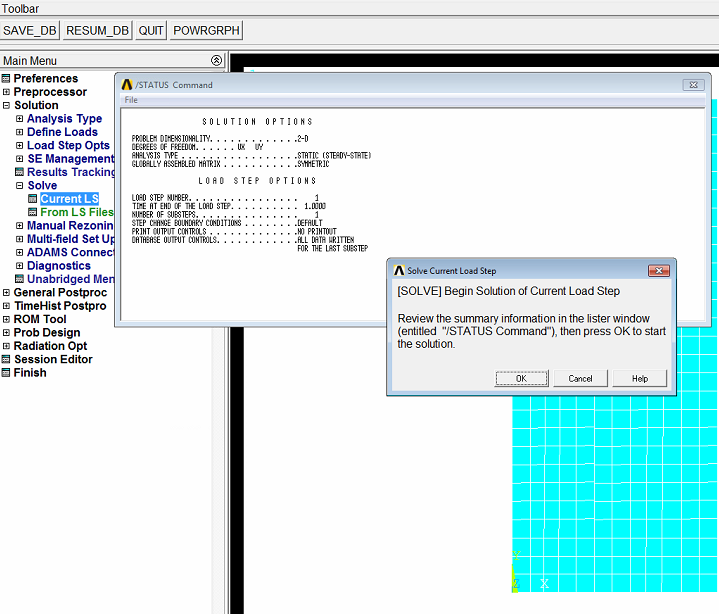
Рисунок 2.24. Окно запуска расчёта.






