

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Топ:
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
МИНИCTEPCTBO ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение
высшего образования
«СЕВЕРО-КАВКАЗСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Невинномысский Технологический институт (филиал)
УТВЕРЖДАЮ
И.о. директора
НТИ (филиал) СКФУ
___________ Кузьменко В.В.
«___» ____________ 201__ г.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по дисциплине «Компьютерная и микропроцессорная техника в электроприводе»
Учебное пособие
Направление подготовки
13.03.02 «Электроэнергетика и электротехника»
Профиль подготовки
Электропривод и автоматика
| СОГЛАСОВАНО: | РАЗРАБОТАНО: | |
| И.о. зав. (выпускающей) кафедрой ИСЭА __________________ Колдаев А.И. «____» _____________ 201__ г. Рассмотрено УМК «____» _____________ 201__ г. Протокол №____ Председатель УМК института _________________Мельникова Е.Н. | Доцент кафедры ИСЭА ___________________ Карабак Ю.В. «____» _____________ 201__ г. |
Невинномысск 2017
ВВЕДЕНИЕ
Специалист по автоматизации электроприводов располагает различными средствами для создания систем управления. Эти средства можно разделить на две большие группы: жесткой и программируемой логики.
Устройство жесткой логики характерно тем, что для его реализации необходимо выполнить материальные связи в виде соединительных проводников в соответствии с разработанной принципиальной схемой. Именно такое решение является традиционно принятым в большинстве выполненных электроприводов для решения как логических, так и функциональных задач. Высокое качество устройств управления с жесткой логикой способствует их широкому внедрению в промышленность.
В то же время устройства на жесткой логике имеют серьезные недостатки, затрудняющие решение сложных задач управления, особенно гибкого управления, введение новых функций, решение задач оптимизации процессов. Возникают также трудности диагностирования и ремонта. Такие недостатки отсутствуют у программируемых устройств логического управления. К ним относятся микропроцессоры и построенные на их основе микроЭВМ и программируемые контроллеры.
|
|
Слово контроллер происходит от английского слова controller, что в буквальном смысле означает управитель. В устройствах электрификации народного хозяйства традиционно принято так называть электрический многопозиционный электрический переключающий аппарат низкого напряжения, с помощью которого изменяют режим работы электрических двигателей или иных приемников электроэнергии. Назначение программируемого контроллера соответствует этому определению. В то же время имеется ряд специфических особенностей, которые нужно уяснить для полного понимания сути нового средства управления.
Рассмотрим, чем различаются микро ЭВМ и программируемый контроллер.
МикроЭВМ, как любая ЭВМ, представляет собой комплекс технических средств и программного обеспечения, способный реализовать любой алгоритм, оформленный в виде программы, хранимой в памяти, и ориентированный на реализацию процессов переработки информации во взаимодействии с пользователем. Взаимодействие с человеком-пользователем является принципиальной отличительной чертой ЭВМ. Средства взаимодействия включают в себя клавиатуру, дисплей либо печатающее устройство. Универсальная ЭВМ способна реализовать решение любой задачи, если последняя может быть представлена в требуемой форме. Что касается полного числи операций, которое должно быть выполнено для реализации алгоритма, то слово любой понимается в смысле, что пользователь может наращивать память практически безгранично за счет новых и новых дисков или лент.
|
|
Программируемый контроллер (ПК) представляет собой устройство переработки информации, предназначенное для совместной работы с некоторой технической системой. Наиболее частой функцией ПК является реализация алгоритмов управления машиной, прибором, транспортным средством, электроприводом и т. п. Такая ориентация определяет архитектуру и технические параметры ПК. На рис. 1 приведена схема управления с применением ПК. Контроллер осуществляет управление одним или несколькими процессами. Для каждого процесса в общем случае необходимо контролировать, поддерживать в заданных пределах или обеспечивать изменение по заданному закону целой группы параметров. Значение каждого параметра определяется в результате измерения. Результаты измерения по каналам связи передаются к контроллеру. Длина каналов связи может изменяться от нескольких сантиметров до нескольких сотен километров. В первом случае говорят, что контроллер встроен в машину. Каналы связи в этом случае представляют собой просто соединительные проводники. Во втором случае говорят о телеуправлении.
При подключении каналов связи к процессору контроллера возникают три самостоятельные задачи. Первая из них — электрическая изоляция выводов БИС контроллера каналами связи во избежание паразитных электрических потенциалов — помех, приводящих к сбоям в работе контроллера. С этой целью каналы связи изолируются от контроллеров с помощью оптронов. Оптрон представляет собой размещенные в одном корпусе светодиод и фототранзистор.
При поступлении электрического сигнала по каналу связи светодиод начинает светиться и переводит фототранзисторв проводящее состояние (рис. 2). Наличие оптронных средств электрической изоляции — одна из весьма важных специфических особенностей контроллеров.
Вторая задача сводится к преобразованию аналоговых сигналов в цифровую форму с помощью аналого-цифровых преобразователей (АЦП).
Третья задача — это осуществление заданной последовательности опроса точек, в которых измеряются параметры. Опрос выполняется по программе, реализуемой процессором контроллера, однако техническая реализация опроса возлагается на порты ввода-вывода или в более сложном случае на периферийные адаптеры. Большое число портов — также весьма важная особенность контроллеров.
|
|
Рис. 1. Схема цифрового управления
Рис. 2. Оптронная электрическая развязка
Контроллер по программе сравнивает измеренные значения параметров с их заданными значениями и в зависимости от результата сравнения вырабатывает управляющие сигналы. Когда это необходимо, управляющие сигналы могут быть преобразованы в аналоговую форму с помощью цифроаналогового преобразователя (ЦАП). Выводы контроллеров, на которых действуют цифровые сигналы, соединяются с каналами связи через оптронные устройства электрической изоляции.
По каналам связи управляющие сигналы поступают к исполнительным органам, воздействующим на ход процесса.
Часто возникают условия, когда целесообразным становится создание многопроцессорной распределенной системы. Например, в устройствах электропривода существуют мощные помехи, способные вызывать сбои в работе контроллеров, так что располагать его вблизи объекта нельзя. Тогда делят систему на части. Например, ЦАП, АЦП и специальный процессор, задающий -режим опроса, вместе со средствами коммутации располагают в непосредственной близости от объекта, остальное оборудование контроллера относят на расстояние и связывают со встроенной частью одним-единственным каналом связи. Создание таких сетей характерно для современной техники контроллеров.
Программное обеспечение контроллеров также специфично. В памяти контроллера в общем случае может храниться большое число программ. Но как бы ни велико было это число, оно всегда ограничено, а сами программы известны заранее, поскольку они составляются и вводятся в контроллер в процессе проектирования и отладки системы. Что же касается операционных систем и внутреннего (системного) программного обеспечения, то у контроллеров оно, как правило, или полностью отсутствует, или же представлено в минимальной степени. Поскольку все режимы работы контроллера, даже если их очень много, известны заранее, потребность во внутреннем (системном) программном обеспечении отсутствует. Практически все ресурсы контроллера могут быть направлены на выполнение его внешних функций. В этом также коренное отличие контроллеров от ЭВМ вообще и от микроЭВМ в частности.
|
|
Еще одна важная особенность программного обеспечения контроллеров состоит в том, что хранящийся в памяти комплект программ обновляется только в исключительных случаях, например, когда меняется технология или осваивается производство нового изделия. Поэтому для хранения программ используются постоянные запоминающие устройства (ПЗУ) и перепрограммируемые запоминающие устройства (ППЗУ).
Хранение программ в ПЗУ и ППЗУ существенно повышает надежность работы систем, поскольку информация, записанная в ПЗУ и ППЗУ, не искажается при отключении питания или под воздействием сильных электрических или магнитных полей.
Следует отметить, что в состав контроллера могут входить устройства обмена информацией с человеком-оператором. Чаще всего они обеспечивают сигнализацию о ходе процесса (сигнальные лампочки) или отчет (средства печати). Обмен контроллера с оператором носит не главный, а вспомогательный характер, и это характерно для контроллеров.
Весьма специфическая особенность контроллеров — необходимость работы в реальном масштабе времени. Это означает, что операции по переработке информации в контроллере должны происходить в том же темпе, в котором она поступает от процесса и в каком она должна потребляться в целях управления. Решающими факторами для обеспечения работы в реальном времени является применение в контроллере быстродействующих процессоров, a также отмеченные особенности программного обеспечения.
В соответствии с программой курса по микропроцессорному (МП) управлению электроприводом в пособии рассматриваются вопросы, которые, по мнению авторов, должны быть изучены в первую очередь.
Практика работы с МП-устройствами, их программирования должна быть рассмотрена в отдельном пособии.
Глава 1
Архитектура микропроцессора
ПЕРВИЧНАЯ ОБРАБОТКА, ПРЕОБРАЗОВАНИЕ И СОПРЯЖЕНИЕ СИГНАЛОВ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ
Источником информации о динамическом состоянии системы электропривода являются разнообразные датчики: тока, напряжения, температуры, скорости, угловых и линейных перемещений. Для обработки информации в МП-системе управления сигналы с этих датчиков должны быть преобразованы в единую форму: цифровой двоичный код.
Это требование привело к разработке цифровых датчиков, выходным сигналом которых является двоичный код. Такие датчики можно считать непосредственными аналого-цифровыми преобразователями координат. Примером таких датчиков могут служить оптические кодирующие преобразователи угла.
С другой стороны, это требование привело к разработке различных способов и технических средств преобразования аналоговых выходных сигналов обычных датчиков в форму двоичного кода. При использовании высокоточных индукционных датчиков положения типа вращающихся трансформаторов и индуктосинов такое преобразование осуществляется обычно аппаратурой, поставляемой в комплекте с датчиком. При использовании аналоговых датчиков средней точности выбор способа и технических средств преобразования осуществляет разработчик системы.
|
|
Рис. 7. Схема обработки аналоговых сигналов в МП-системе
В этом случае процесс преобразования осуществляется обычно в три основных этапа. Первый этап — преобразование сигналов разной физической природы в напряжение постоянного тока. Он подробно рассматривается в литературе по измерению физических величин электрическими методами.
Вторым этапом является нормализация сигнала. Это понятие включает в себя комплекс мер по улучшению качества сигнала, повышению надежности и достоверности содержащейся в сигнале информации. Сюда входит усиление сигнала, подавление и фильтрация помех, согласование уровня сигнала с номинальным уровнем преобразователя аналог — код.
Наконец, третий этап — собственно аналого-цифровое преобразование. Так как аналоговой величиной здесь является напряжение, то речь идет о преобразовании напряжения в двоичный, почти исключительно — в параллельный код. Типичная схема обработки аналогового сигнала приведена на рис. 7.
В настоящее время в большинстве общепромышленных комплектных систем электропривода управление силовым преобразователем осуществляется аналоговым способом. Поэтому после обработки информации МП-регулятором требуется произвести ее обратное преобразование из цифровой формы в форму напряжения постоянного тока требуемого уровня и полярности. Эта операция осуществляется цифро-аналоговым преобразователем.
Особое место среди датчиков координат занимает фотоимпульсный датчик, формирующий импульсы, частота которых пропорциональна угловой скорости ротора. Его можно использовать для получения информации как о скорости, так и о положении вала механизма.
Ниже будут рассмотрены вопросы нормализации сигналов, принципы построения цифро-аналоговых и аналого-цифровых преобразователей, методы измерения скорости и угла поворота фотоимпульсным датчиком, а также вопросы сопряжения внешних устройств с МП-системой.
Нормализация сигналов
Если бы аналоговый сигнал с датчика содержал только информацию об измеряемой координате, то все проблемы нормализации свелись бы к выбору такого коэффициента усиления сигнала, чтобы его максимально возможное значение было близко к уровню шкалы АЦП, но не превышало его. Однако все электронные устройства, работающие в структуре системы управления электроприводом, функционируют в непосредственной близости с силовыми электрическими устройствами (преобразователями, двигателями, трансформаторами, контакторами). Такое «соседство» неизбежно приводит к появлению возмущений и помех в цепях электронных устройств. Эти возмущения могут снизить качество работы системы или даже нарушить ее работоспособность. При этом наибольшее влияние помехи в любых системах автоматического управления оказывают на маломощные цепи аналоговых датчиков координат.
Опыт показывает, что борьба с помехами составляет значительную часть времени наладки системы управления. Если же вопросы борьбы с помехами и задачи шумопонижения решаются на стадии проектирования системы, то можно устранить значительную часть этих трудностей. Напротив, пренебрежение основными принципами построения помехозащищенных систем может предопределить неработоспособность САУ в реальных условиях эксплуатации. Технические решения по борьбе с помехами, принимаемые на поздних этапах разработки и наладки системы, являются менее эффективными, приводя к увеличению размеров и массы аппаратуры.
Источники помех. Перечислим основные причины, порождающие помехи в системе автоматизированного электропривода:
· наводки напряжения сетевой частоты;
· динамические короткие замыкания силовых цепей преобразователей;
· перенапряжения при отключении электромагнитных устройств;
· броски напряжения сети при коммутации мощных потребителей;
· дребезг и ненадежность контактов электрических соединителей (реле, разъемы и т. п.);
· тепловые шумы электронных компонентов (усилители, резисторы);
· атмосферное электричество;
· микрофонные эффекты электронных компонентов при вибрации;
· электрохимические процессы в электрических соединениях разнородных материалов.
По отношению к датчику помехи могут быть как внешними, так и внутренними. К внутренним помехам относятся, например, коммутационные шумы тахогенератора постоянного тока, шумы квантования цепей гальванического разделения сигналов по схеме «модулятор — демодулятор», тепловые шумы усилителей первичных преобразователей датчиков.
В зависимости от того, каким путем попадает помеха от источника возмущения в цепь полезного сигнала, различают индуктивные, емкостные и гальванические помехи. Для оценки уровня индуктивных помех можно привести следующие цифры: силовой провод длиной 1 м с током, изменяющимся со скоростью 100 А/мкс, создает в параллельно расположенном на расстоянии 1 мм проводнике такой же длины помеху 0,2 В. Практические значения удельной емкости параллельно расположенных проводников составляют 10... 100 пФ/м.
Причины возникновения гальванических помех —связь различных узлов системы управления через сопротивления, например, через сопротивление общего для нескольких цепей провода, через заземляющий провод, через общую для нескольких потребителей цепь питания.
На рис. 8, 9 приведены варианты разводки питания от общего источника к блокам простой системы стабилизации скорости двигателя постоянного тока при питании его от широтно-импульсного преобразователя с силовым ключом СК: к регулятору, усилителю мощности и двигателю.
Реальные проводники соединений неизбежно обладают хоть и малыми, но вполне определенными собственными комплексными сопротивлениями znp. Их можно рассматривать как отрезки RLC цепей с параметрами, зависящими от сечения и способа прокладки проводов.
Мощные устройства — усилитель мощности и двигатель потребляют кратковременные импульсы тока высокой мощности и скорости нарастания. Эти импульсы тока создают на проводниках питания напряжения помех U п. Уровень этих помех может достигать десятков и даже сотен вольт.
Такого рода помехи могут не только нарушить работу МП-системы, но и вывести из строя ее электронные компоненты. Кроме импульсных помех на активных сопротивлениях проводников будут создаваться падения напряжения от протекания токов средних значений.
Рис. 8. Пример неправильной разводки цепей питания и межблочных соединений
Схема рис. 8 представляет пример крайне неудачной разводки цепей питания. Якорный ток двигателя и ток питания регулятора протекают по одному проводнику. Между тем один из выводов тахогенератора подключен к общему проводу непосредственно вблизи клеммы якоря двигателя. Таким образом, напряжения помех U п4 и U п5 будут просуммированы с напряжением тахогенератора, и отделить их от полезного сигнала будет чрезвычайно трудно. Аналогично, из-за неудачного подключения общего проводника источника задающего сигнала с этим сигналом будет просуммировано напряжение помехи U п3. Кроме того, значительные пульсации питающего напряжения узлов системы, особенно регулятора, могут существенно ухудшить качество их работы или даже вызвать недопустимые сбои.
Рис. 9. Вариант правильной разводки цепей питания и межблочных соединений
Второй вариант разводки цепей питания и малосигнальных цепей более удачен. Падение напряжения в проводниках хоть и вызовет изменения питающего напряжения, но уже только для «своих» схем. Разводка общих проводников сигнала задания и обратной связи с тахогенератора такова, что падение напряжения в проводах питания не суммируется с полезным сигналом.
Реактивный характер сопротивлений соединительных проводов приводит к значительным импульсным помехам даже при коммутации небольших токов, если время переключения очень мало. Для современных цифровых микросхем время переключения составляет десятки или даже единицы наносекунд. Нетрудно представить последствия, если на шине длиной 1 м сечением 0,5 мм2 цифровая схема с переключением тока 50 мА за время 10 нс создает помеху до трех вольт. Напомним, что для типовых ТТЛ микросхем логический ноль и единица различаются уровнем 2 В.
Синфазные и дифференциальные помехи. Если помеха, созданная за счет индуктивной или емкостной связи, в равной мере наводится в обоих проводниках, соединяющих датчик с усилителем, то ее называют синфазной, продольной или помехой общего вида Uc ф. Если же помеха создает разность напряжений между этими проводниками и, таким образом, неотличима от полезного сигнала, ее называют дифференциальной, противофазной или поперечной помехой Uдп.
На рис. 10 представлена эквивалентная схема, показывающая, каким образом приложены напряжения этих помех по отношению к источнику сигнала и первому каскаду усиления. Сопротивления соединительных проводов обозначены через z 1 и z 2.
Поперечную помеху, особенно если ее спектр совпадает со спектром полезного сигнала, очень трудно от него отделить. Основными способами борьбы с такой помехой являются меры конструктивного характера: экранирование мощных источников электромагнитного излучения и малосигнальных цепей, использование симметричных схем датчиков и их соединительных линий, пространственное разделение силовых и информативных элементов системы.
Подавление синфазных помех
Синфазная помеха приложена ко входам усилителя иначе, чем полезный сигнал, существенно облегчает борьбу с ней.
Рис. 10. Схема воздействия помех на вход усилителя
Рис. 11. Схема несимметричного усиления
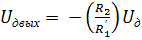
Рассмотрим схему усиления сигнала с удаленного аналогового датчика (рис.11) считая, что в цепи передачи сигнала датчика Uд приложена синфазная помеха Uсф. Сопротивление проводов Rпр1 и Rпр2 считаем активным, в общем случае они могут быть различными. Синфазная помеха может быть обусловлена емкостными или индуктивными наводками, а при гальванической связи датчики с корпусом усилителя –падением напряжения на общем проводе соединения. Усилитель сигнала реализован на базе операционного усилителя в инвертирующем включении.
Отдельно рассчитаем усиление полезного сигнала датчика и паразитное прохождение сигнала помехи на выход усилителя.
Выходной сигнал усилителя, обусловленный сигналом датчика
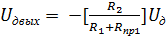 (1)
(1)
Выходной сигнал усилителя, обусловленный сигналом помехи,
 (2)
(2)
Таким образом, полезный сигнал усиливается в  раз, а синфазная помеха передается на выход схемы без усиления (но и без подавления).
раз, а синфазная помеха передается на выход схемы без усиления (но и без подавления).
Если же неивертирующий вход усилителя соединить с его общим проводом, как это показано на схеме пунктиром (что часто делают неопытные разработчики),то сигнал помехи оказывается включенным последовательно с сигналом датчика. Таким образом синфазный сигнал помехи оказывается превращенным в дифференциальный и будет усилен, как и полезный сигнал, в раз.
Для оценки способности схемы подавлять синфазные помехи используется понятие коэффициента ослабления синфазного сигнала kocc, который определяется как отношение коэффициента передачи полезного сигнала к коэффициенту передачи синфазной помехи.
Для рассматриваемой схемы включения в первом случае kocc равен , во втором случае он равен единице, т.е. схема не обладает способностью подавлять синфазные помехи.
Рис.13Схема дифференциального усилителя с выходом kocc
Рис. 12 Схема дифференциального усиления
Мощным средством борьбы с синфазными помехами является использование дифференциальных усилителей (или ОУ в дифференциальном, симметричном включении). Простейшая схема такого вида приведена на рис.12.Используя приведенные на схеме обозначения, выполним аналогичным предыдущим расчеты прохождения сигналов:
 (3)
(3)
 (4)
(4)
Если подобрать  и
и  =
=  , то
, то  = 0. Таким образом, по крайней мере, теоретически, схема обладает способностью подавлять синфазный сигнал.
= 0. Таким образом, по крайней мере, теоретически, схема обладает способностью подавлять синфазный сигнал.
На практике коэффициент подавления синфазного сигнала определяется качеством операционного усилителя и может достигать80…100 дБ. Для эффективного использования свойств дифференциальных схем необходимо по возможности точно выдерживать равенства  и = .Последние из равенств легче выполнить, если входное сопротивление операционного усилителя велико, тогда равенство реализуется за счет выбора
и = .Последние из равенств легче выполнить, если входное сопротивление операционного усилителя велико, тогда равенство реализуется за счет выбора  (
( и
и  хоть и различны,но очень малы).Оценить реальное значение kocc при отклонении значений резисторов от расчетных величин можно по соотношениям (1)‑(4).
хоть и различны,но очень малы).Оценить реальное значение kocc при отклонении значений резисторов от расчетных величин можно по соотношениям (1)‑(4).
Стремление максимально использовать цепи не свойства дифференциального усилителя подавлять синфазные помехи привело к разработке специальных схем, так называемых измерительных, или инструментальных усилителей. Они отличаются большим входным сопротивлением и высоким коэффициентом подавления синфазных помех –до 105,что достигается использованием качественных современных ОУ и высокоточных резисторов. Вариант схемы такого усилителя приведен на рис.13.
Фильтрация. Если, несмотря на принятые меры конструктивного характера (экранировка, правильный монтаж, симметричные схемы датчиков),дифференциальная помеха попала в цепь полезного сигнала, единственным средством улучшения качества сигнала является фильтрация.
Возможность этого улучшения основана на том, что частотные спектры полезного сигнала и помехи могут не совпадать или, по крайней мере, частично различаться. Тогда, используя частотно–зависимые цепи, можно преградить путь тем составляющим спектра помехи, которые не совпадают со спектром полезного сигнала.
Сигналы датчиков координат электропривода несут информацию о механическом движении объекта управления и двигателя, а также тех составляющих токов и напряжений в силовых цепях, которые вызывают это движение. Таким образом, спектры полезных сигналов датчиков являются достаточно низкочастотными, по крайней мере, редко выходят за пределы нескольких сотен Гц.
Спектры же помех, вызываемых коммуникационными процессами в мощных силовых цепях электропривода, а также процессами переключения цифровых микросхем, простираются до частот в десятки мГц. Таким образом, принимается возможность улучшения качества сигналов за счет разделения спектров путем использования фильтров имеется.
Для оценки степени «засоренности» полезного сигнала поразительными помехами используется понятие отношение сигнала к шуму (С/Ш).Оно определяется через отношение среднего квадрата полезного сигнала к среднему квадрату сигнала помехи (шума),т.е.
 .
.
Через отношение С/Ш удобно выразить и степень улучшения качества сигнала дифференциального усилителем с высоким коэффициентом ослабления синфазного сигнала. Если соотношение С/Ш на входе усилителя обозначить через kсшвх, то на его выходе это соотношение будет
 .
.
В задачах автоматического управления как помеху, так и полезный сигнал обычно считают случайными функциями времени, свойства которых задаются вероятностными характеристиками. Довольно часто известными являются лишь две характеристиками: интенсивность сигнала(задаваемая либо среднеквадратичным значением, либо среднеквадратичной плотностью) и граничная частота спектра сигнала ωгр, определяемая полосой частот, в которой сосредоточена большая часть мощность сигнала.
На рис.14 предоставлены спектральные характеристики полезного сигнала и шума на выходе согласующего измерительного усилителя. Конкретный вид характеристики полезного сигнала определяется свойствами объекта управления и характером технологического процесса. Конкретный вид спектральной характеристики шума зависит от всего перечисленного выше многообразия факторов, порождающих помехи.
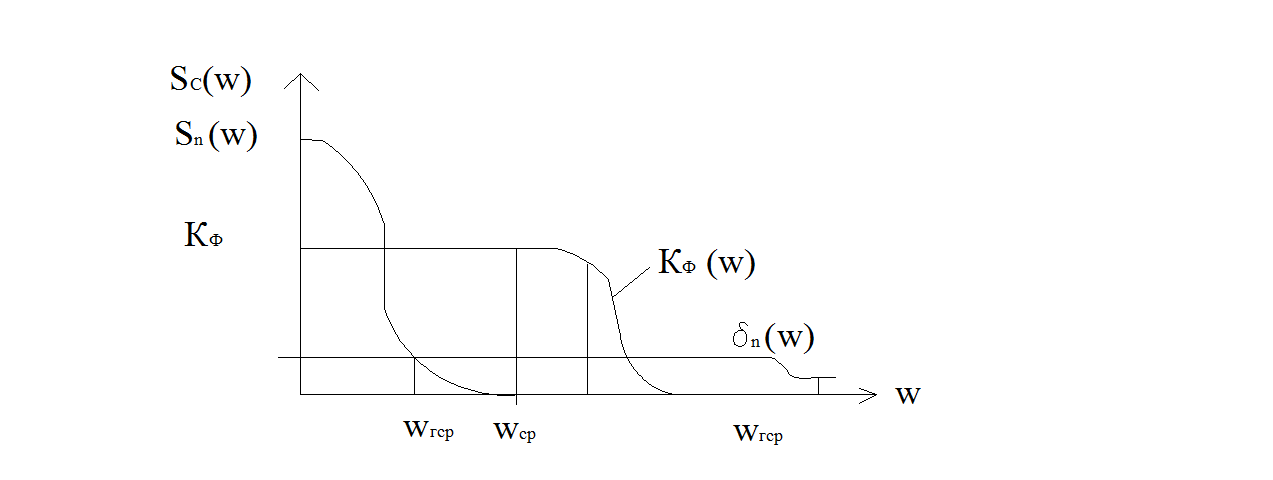
Рис. 14 Спектральные характеристики сигналов и АЧХ фильтра.
Если после соглашающего усилителя включить фильтр нижних частот (ФНЧ),частотная характеристика kф(ω) (рис 14) которого согласована со спектральной характеристикой полезного сигнала, то спектр сигнала на выходе этого фильтра будет существенного сужен. Это приведет к снижению интенсивности сигнала помех.
Отношение С/Ш на выходе фильтра можно оценить по приближенной формуле
где  –частота среза ФНЧ.
–частота среза ФНЧ.
Общее повышение соотношение С/Ш схемой нормализации составит
 .
.
Выбор частоты среза ФНЧ. При оценке реально достижимого соотношения С/Ш необходимо учитывать несколько взаимно противоречивых факторов. Понижение частоты среза ФНЧ приводит к улучшению подавления помех, но нельзя ωcр выбирать ниже граничной частоты спектра полезного сигнала, чтобы не исказить полезную информацию.
С другой стороны, любой ФНЧ — это инерционная динамическая система, и с понижением ωcр ее инерционность растет, что обязательно нужно учитывать при использовании фильтров в цепях датчиков координат замкнутых систем электропривода. Вне зависимости от способа технической реализации ФНЧ его передаточную функцию можно представить в виде
WФ(s) = kф/L(s),
где kф — коэффициент передачи фильтра по постоянному току; L(s)—линейный оператор, определяющий конкретную характеристику фильтра (используются полиномы Баттерворта, Чебышева, Бесселя).
Наиболее качественной является характеристика ФНЧ, приближающаяся к прямоугольной, что достигается повышением порядка оператора полинома. Однако при этом также увеличиваются инерционные свойства ФНЧ, запаздывание выходного сигнала относительно входного. Для грубой оценки вносимого запаздывания реальную передаточную функцию ФНЧ заменяют передаточной функцией эквивалентного звена 1-го порядка
WЭ(s) = kф/(TЭs+ 1),
где ТЭ —n/ωcр, n — порядок реального ФНЧ.
При выборе частоты среза и порядка полинома фильтра величину эквивалентной постоянной времени следует сопоставить со значениями малых постоянных времени математической модели электропривода.
Улучшая качество сигнала, полезного вспомнить об уровне абсолютной погрешности датчика. Нет смысла «давить» шумы до уровня, существенно более низкого, чем погрешность. Тем более, при дальнейшем аналого-цифровом преобразовании разрядность (и точность)преобразователя выбирается исходя из погрешности всего канала измерения, а погрешность эта определяется в первую очередь самым «узким» местом.
В подтверждение сказанного приведем табл.2 с соотношением между разрядностью двоичного кода, относительным и абсолютном (для шкалы 10 В)значениями погрешности квантования и рекомендуемым отношением С/Ш преобразуемого сигнала. Относительная погрешность квантования определена через отношение уровня, соответствующего единице младшего разряда, к шкале преобразователя.
ТАБЛИЦА 2
| Разрядность кода | Абсолютная погрешность, В | Относительная погрешность, % | Kсш на входе преобразователя | |
| о.е. | дБ | |||
| 0,625 | 6,2 | 2*103 | ||
| 0,156 | 1,6 | 3,2*104 | ||
| 0,039 | 0,4 | 5*105 | ||
| 0,0097 | 0,1 | 8*106 | ||
| 0,0024 | 0,02 | 1,3*108 |
Общий коэффициент передачи канала нормализации выбирается исходя из диапазона изменения измеряемого сигнала, чувствительности датчика и уровня шкалы аналого-цифрового преобразователя. В любом случае максимально возможные значения преобразуемого сигнала должны быть близки к уровню шкалы преобразователя, но не превышать его.
Принципы построения ЦАП.
В основе построения большинства типов ЦАП лежит суммирование аналоговых величин (токов, напряжений),значения которых пропорциональны весам разрядов двоичного кода. Простейший вариант такого преобразователя, реализующий принцип суммирования взвешенных токов на базе ОУ, показан на рис.16.Схема соответствует четырехразрядному преобразователю.
Рис. 16. Схема ЦАП с суммированием взвешенных токов.
Ток в каждой из четырех параллельных входных ветвей определяется величиной  и номиналом соответствующего резистора. Подключениеветвей осуществляется управляемыми ключами
и номиналом соответствующего резистора. Подключениеветвей осуществляется управляемыми ключами  при единичном значении цифрового сигнала соответствующего разряда. Единица в младшем разряде приводит к подключению цепи с резистором 8R, при этом выходное напряжение
при единичном значении цифрового сигнала соответствующего разряда. Единица в младшем разряде приводит к подключению цепи с резистором 8R, при этом выходное напряжение  изменяется на минимальное значение, равное уровню разрешения
изменяется на минимальное значение, равное уровню разрешения  т.е.
т.е.
 .
.
Выбором величины Roc можно задавать максимальное значение (шкалу ЦАП) соответствующее максимальному значению двоичного кода.
При большой разрядности ЦАП разница между сопротивлениями резисторов крайних ветвей становится очень большой, что трудно реализовать, особенно в интегральном исполнении. По этойпричине преобразователи большой точности (и разности)часто выполняются по лестничным схемам типа R‑2R.
Рис. 17 ЦАП с лестничной схемой R-2R
На рис. 17 приведена схема четырехразрядного ЦАП, выполненного на базе цепи R‑2R и не инвертирующего повторителя. При замыкании, например, ключа К3 старшего разряда двоичного кода  выходное напряжение составит 0,5 Uэт, т.е. будут соответствовать весу старшего разряда. При замыкании только ключа К2 Uвых=0,25 Uэт и т.д. Достоинством преобразователя такого вида является использование резисторов всего двух номиналов, что легко реализуется в микроэлектронном исполнении.
выходное напряжение составит 0,5 Uэт, т.е. будут соответствовать весу старшего разряда. При замыкании только ключа К2 Uвых=0,25 Uэт и т.д. Достоинством преобразователя такого вида является использование резисторов всего двух номиналов, что легко реализуется в микроэлектронном исполнении.
Аналоговые ключи преобразователей выполняются исключительно бесконтактными на базе биполярных и униполярных транзисторов. Для униполярных транзисторов характерно отсутствие остаточного напряжения во включенном состоянии, кроме того, на их основе можно строить ключи, коммутирующие напряжение произвольной полярности.
В ЦАП с такими ключами может использоваться источник эталонного напряжения любой полярности и любого уровня напряжения. Конечно, в схеме ЦАП для получения хорошего соотношения С/Ш напряжения следует выбирать по возможности большим. Однако такой ЦАП можно рассматривать и как аналого-цифровой перемножитель сигнала (рис.18).
Рис. 18 ЦАП в качестве управляемого кодом коэффициента.
Эту же схему можно интерпретировать как управляемый двоичным кодом коэффициент передачи (цифровой потенциометр).
Преобразование чисел со знаком. При преобразовании кода в разнополярный аналоговый сигнал приходится учитывать три способа представления чисел со знаком.
Рис. 19 К
|
|
|

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!